1
Изобретение относится к области автоматического управления многоконтурными системами электроприводов с подчиненным регулированием из параметров.
Известна система подчиненного регулирования электроприводов, выполненная по структуре с каскадным соединением замкщ-тых контуров и последовательным соединением регуляторов 11. Однако в такой системе при увеличении числа контуров Heизбежно снижается быстродействие.
Известна также система, которая частично исключает этот недостаток за счет введения дополнительных обратных связей с выхода каждого внутреннего контура на вход регулятора управляющего им внешнего контура через динамическое звено с передаточной функцией, обратной передаточной функции объекта регулирования внешнего контура 2.
Недостаток этой системы заключается в необходимости использования пропорционально-дифференциальных регуляторов, что усложняет их реализацию и усиливает влияние высокочастотных помех на работу системы.
Цепью изобретения является упрощение реализации системы и повышение ее помехозащищенности .
Это цель достигается тем, что в цепь регулирования перед входами регуляторов внутренних контуров регулирования включены дополнительные элементы сравнения, на вторые входы которых подключены выходы датчиков регулируемых величин соответствующих контуров, в цепь каждой из ранее дополнительных обратных связей включено динамическое звено с передаточной функцией, равной передаточной функции объекта регулирования соответствующего внешнего контура, а вход динамического звена, т. е. вход цепи обратной связи, подключен к выходу дополнительного элемента сравнения внутреннего контура.
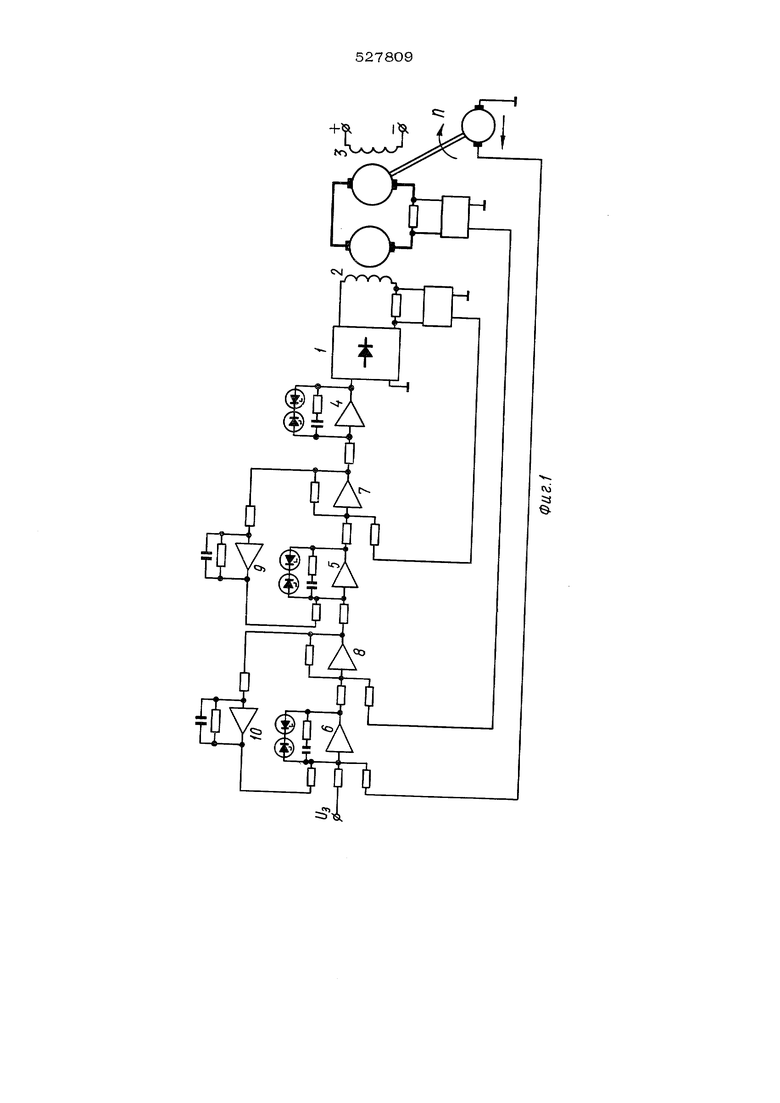
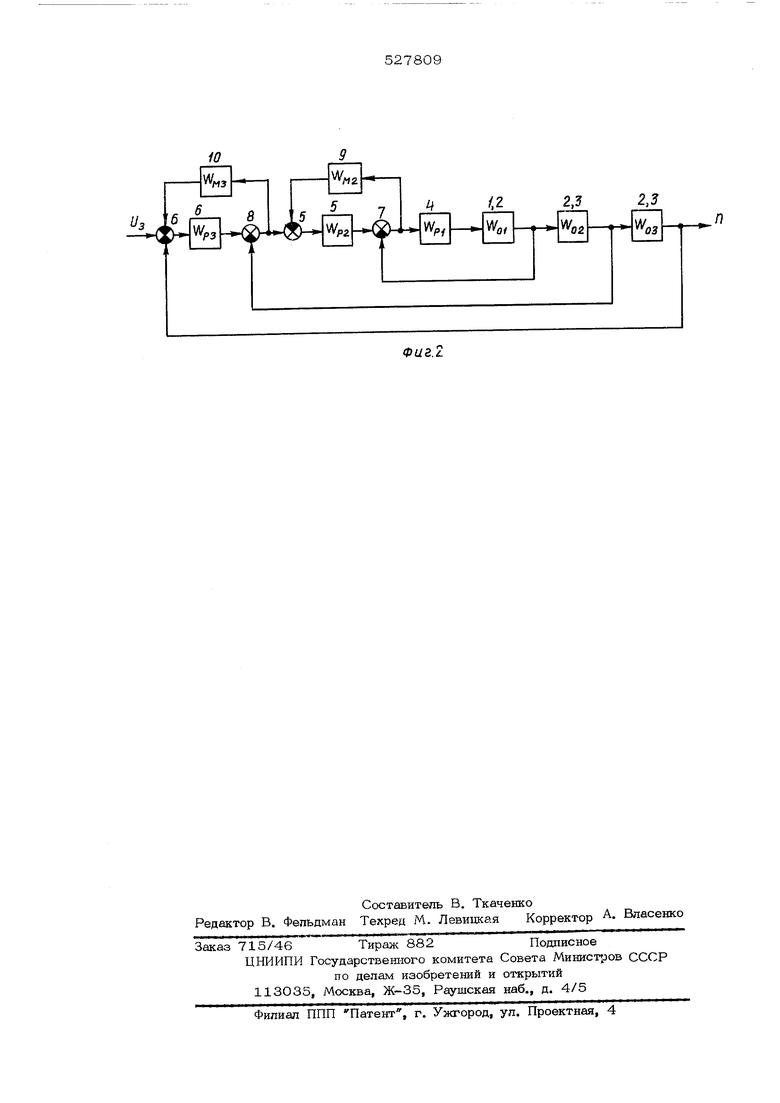
На фиг. 1 изображена принципиальна схема электропривода с предлагаемой системой управления с тремя контурами регулирования ; на фиг. 2 - структурная схема электропривода. Электропривод содержит регулируемый возбудитель 1, генератор 2, двигатель 3, регуляторы тока возбуждения 4, тока якор 5 и скорости 6, дополнительное элементы сравнения 7 и 8 в контурах тока возбуждеВИЯ и тока якоря, а также дополнительные обратные связи с выходов элементов сравнения 7 и 8 на входы соответственно регу пяторов 5 и 6 через динамические звенья 9 и 10, которые представляют собой модел объектов регулирования контуров тока якор и скорости двигателя. На фиг. 2Wp,W,,,W,Wo,,W,,,V,, Передаточные функции регуляторов функции регуляторов и объектов регулирования кон iypoB тока возбуждения, тока якоря и скои W дз-модели звень - VA/рости движения; eBWo HW,J, т. , W,, , W.. W,,, е. W. ЛЛЗ03 Благодаря введению обратных связей с выхода элементов сравнения 7 и 8 на входы регуляторов 5 и 6 через модели 9 и 1О объектов регулирования контуров тока якоря и скорости двигателя передаточная функция системы имеет следующий вид: «„„(р) ...a-W..-W,,W,. ) ,W J/14W 2Woa(,J где п и и, - скорость двигателя и входной сигнал системы. Таким образом, предложенная система эквивалента последовательному соединению трех замкнутых контуров, передаточные функции которых в разомкнутом состоянии W W . равны W,,-W,,, а в замкнутом ° i- Wpi-W,; При этом, если передаточные функции W и Wo3 представляют собой апериодические звенья первого порядка, то и при пропорци ональных и при пропорционально-интегральны регуляторах обеспечиваетсяустойчивость сие темы, а соответствующим выбором параметро этих регуляторов существенно уменьщается инерционность контуров регулирования, т.е. обеспечивается требуемое быстродействие системы и не снижается ее устойчивость. Аналогично может быть построена система с любым количеством контуров регулирования. При этом требуется введение дополнительных 2 ( п - 1 ) операционных усилителей, где п - количество контуров. Поскольку в предлагаемой системе отсутствует необходимость применения дифференцирующих звеньев и используются в цепях обратных связей простые апериодические звенья, это упрощает реализацию системы и повыщает ее помехозащищенность. Формула изобретения Система подчиненного регулирования параметров электропривода с переключающимися обратными связями, содержащая в каждом из соподчиненных контуров регулирования последовательно включенные регулятор и объект регулирования, а также дополни тельные обратные связи из внутренних контуров регулирования на вход регуляторов управляющих ими внешних контуров о тличающаяся темд что, с целью упрощения реализации и повышения помехозащищенности, в цепь регулирования перед входами регуляторов внутренних контуров регулирования включены дополнительные элементы сравнения, на вторые входы которых подключены выходы датчиков регулируемых величин соответствующих контуров, в цепь каждой из дополнительных обратных связей включено динамическое звено с передаточной функцией, равной передаточной функции объекта регулирования соатветствующего внешнего контура а вход динамического звена подключен к выходу дополнительного элемента сравнения внутреннего контура. Источники информации, принятые во внимание при экспертизе: 1.Е. Д„ Лебедев и др. Управление вентильными электроприводами постоянного тока, М. Энергия, 197О г., стр. 28, 2.В. И. Ключев Ограничение динамических нагрузок электроприводов. М. Энергия, 1971 г,, стр 121-127, рис. 3-14.
| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся робастная система управления | 2023 |
|
RU2819264C1 |
| Электропривод постоянного тока | 1984 |
|
SU1358059A1 |
| Система подчиненного регулирования частоты вращения электропривода | 1985 |
|
SU1288881A1 |
| Электропривод постоянного тока | 1987 |
|
SU1555793A1 |
| Электропривод постоянного тока | 1977 |
|
SU681528A1 |
| Устройство для автоматического управления электроприводом | 1976 |
|
SU635585A1 |
| Электропривод постоянного тока | 1978 |
|
SU773880A1 |
| ПРОГРАММНО-УПРАВЛЯЕМЫЙ ПОЗИЦИОННЫЙ ЭЛЕКТРОПРИВОД С УЛУЧШЕННЫМИ ХАРАКТЕРИСТИКАМИ НА БАЗЕ ИНЕРЦИОННОГО ПРЕОБРАЗОВАТЕЛЯ ПРИ ИДЕАЛЬНОМ ВАЛОПРОВОДЕ | 2011 |
|
RU2455749C1 |
| Электропривод постоянного тока | 1987 |
|
SU1628173A1 |
| Электропривод с двухзонным регулированием скорости | 1983 |
|
SU1185516A1 |