сх
Изобретение относится к механическим передачам для преобразования колебательного движения в возвратно- поступательное и может быть исполь- зовано в механизмах раздвижных две- рей и в приборах для обеспечения плоскопараллельного перемещения выходного звена.
Цель изобретения - упрощение кон- струкции механизма путем замены зубчатой кинематической связи на фрикционную с гибким звеном.
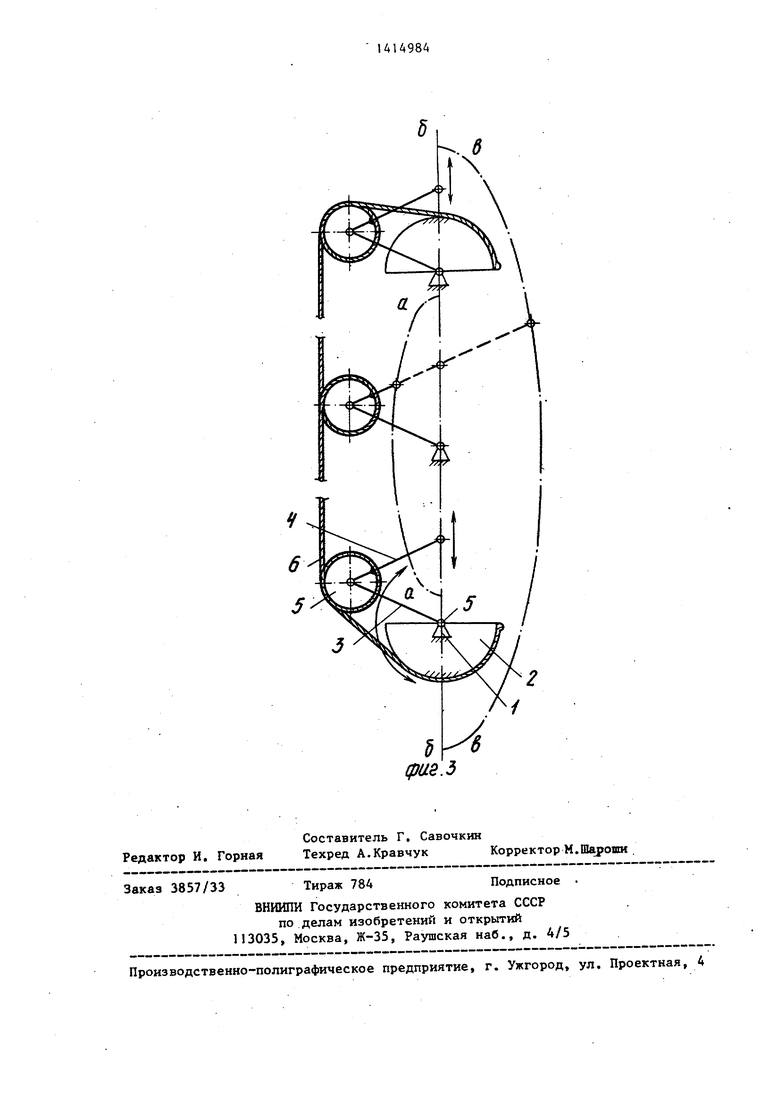
На фиг.1 изображен коромыслово- шатунный механизм с гибким звеном; на фиг. 2 - вид А на фиг. 1; на фиг. 3 - вариант выполнения механизма.
Коромыслово-шатунный механизм с гибким звеном содержит основгшие 1, на котором жестко закреплены дуговые элементы 2 и шарнирно установлены коро(шсла 3. Последние шарнирно связаны с шатунами 4. Ролики 5 уста- новлены на коромыслах 3 и жестко связаны с шатунами 4. Диаметр роликов 5 равен радиусу дуговых элементов 2. Гибкое звено 6 охватывает ролики 5 по всей окружности, а концы его закреплены на соответствунлцих дуговых элементах 2. Отношение длин шатунов 4 к коромыслам 3 может быть выбрано в диапазоне 0,5-2, в зависимости от этого меняется траектория
движения конца шатуна 4 от прямой б-б до эллиптической а-а и в-в. На концах шатунов 4 установлено выходное звено. 7.
Механизм работает следующим образом.
При угловых перемещениях коромысла 3 гибкое звено 6 укладывается на поверхности дугового элемента 2 или сбегает, при этом установленные на коромыслах 3 ролики 5 приходят во вращение, обеспечивая поворот шатунов 4. Ведомое звено 7 совершает плоскопараллельное движение.
Формула изобретения
Коромыслово-шатунный механизм с гибким звеном, содержащий основание шарнирно закрепленные на нем по крайней мере два коромысла и кинематически связанные с ними соответст- вукнцие шатуны, отличающий- с я тем, что, с целью упрощения конструкции, кинематическая связь выполнена в виде роликов, установленных на коромыслах и жестко связанных с соответствующими шатунами, дву дуговых элементов, закрепленных на основании, радиус которых равен метру роликов, и гибкого элемента, охватывающего ролики по всей окружности, концы которого закреплены на соответствующих дуговых элементах.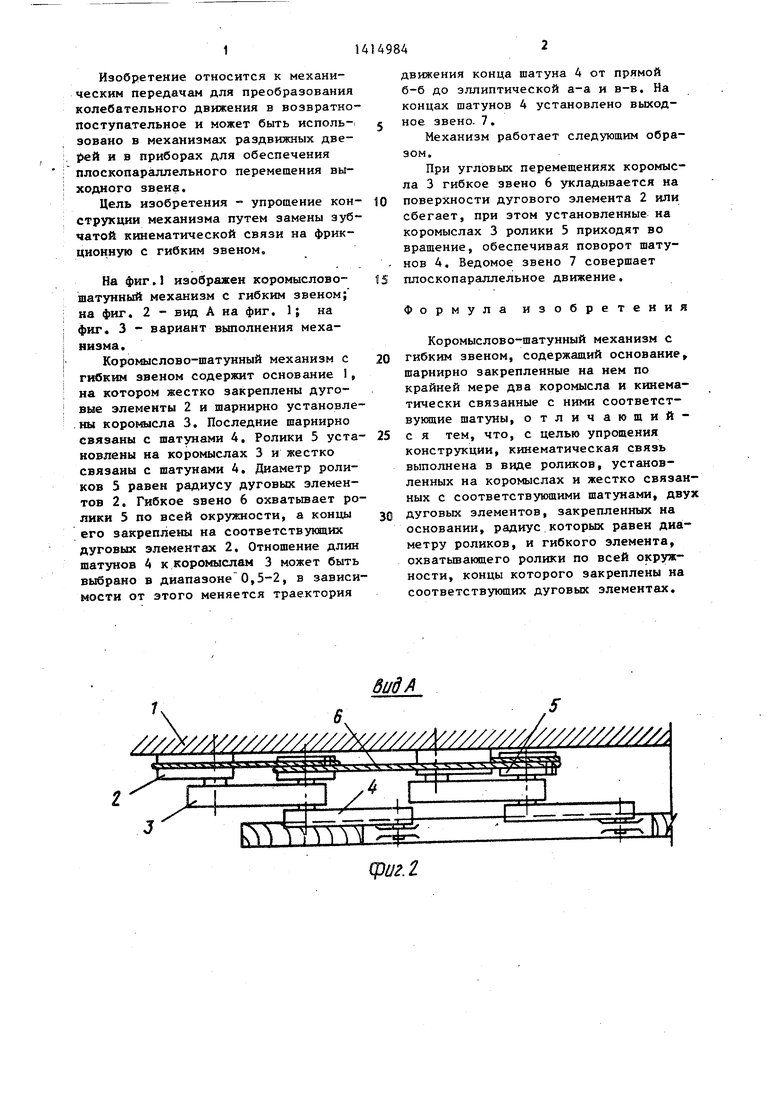
| название | год | авторы | номер документа |
|---|---|---|---|
| Шлифовально-полировальныйСТАНОК | 1979 |
|
SU848302A1 |
| СПОСОБ И МЕХАНИЗМ В.И. ПОЖБЕЛКО ДЛЯ ВОСПРОИЗВЕДЕНИЯ ВРАЩЕНИЯ С ОСТАНОВКАМИ | 2003 |
|
RU2249133C1 |
| Кривошипно-коромысловый механизм Вахрушевых (варианты) | 2019 |
|
RU2822681C2 |
| Привод режущего аппарата | 1990 |
|
SU1762788A1 |
| ПЛАНЕТАРНАЯ ПЕРЕДАЧА (ВАРИАНТЫ) | 1996 |
|
RU2124661C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| Устройство для доводки деталей | 1982 |
|
SU1027016A1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2000 |
|
RU2176592C1 |
| Кривошипно-ползунный механизм | 1984 |
|
SU1221416A1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312763C1 |
Изобретение относится к механическим передачам для преобразования колебательного движения в возвратно-поступательное и может быть использовано в механизмах раздвижных дверей и в приборах для обеспечения плоскопараллельного перемещения выходного звена. Целью изобретения является упрощение конструкции механизма путем замены зубчатой кинематической связи на фрикционную с гибким звеном. Зона связи выполнена в виде роликов 5, установленных на коромыслах 3 и жестко связанных с шатунами 4. Два дуговых элемента 2, радиус которых равен диаметру роликов 5, жестко закреплены на основании I. Гибкое звено 6 охватывает ролики 5 по всей окружности, а концы его закреплены на соответствую- щих дуговых элементах 2. При угловых переметениях коромысла 3 гибкое звено 6 укладывается на поверхности дугового злемента 2 и сбегает, при этом установленные на коромыслах 3 ролики 5 приходят во вращение, обеспечивая поворот шатунов 4« 3 ил. § (Л
M/i
Редактор И. Горная
Составитель Г, Савочкин
Техред А.Кравчук Корректор М.Шароши .
Заказ 3857/33
Тираж 784
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Подписное
| Параллелограммный механизм | 1959 |
|
SU136142A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
