Предлагаемое изобретение относится к механизмам со сложным движением выходных звеньев, применяемым для выполнения операций при обслуживании машин и оборудования. Такие механизмы обеспечивают захват изделия, его перемещение из одной позиции в другую, освобождение и передачу изделия.
Известно, например, устройство, обеспечивающее захват изделия, его перемещение по дуге окружности и освобождение, содержащее исполнительный механизм с губками для захвата изделий, механизм поворота и гидропривод (Крайнев А.Ф. Словарь-справочник по механизмам. - М.: Машиностроение, 1987. - С.9 и 10, рис.а).
Основным недостатком данного устройства является усложненность привода и малая частота повторения рабочих циклов, т.е. невысокая производительность. Указанный недостаток является результатом использования отдельных двигателей для механизмов захвата и поворота, а также применения тихоходного гидравлического привода. Недостаток особенно ощутим при агрегатировании устройства с машинами-автоматами и линиями высокой производительности.
Известно также устройство типа «рука» для передачи изделий, содержащее комбинированный механизм, выполненный в виде передаточного механизма с выходным звеном и исполнительного механизма с выходными звеньями и губками для захвата изделий, и привод (Патент №2217296, опубл. в БИПМ, 2003. - №33 - прототип). Данное устройство является средством того же назначения, что и предлагаемое изобретение.
Основным недостатком прототипа является то, что выходные звенья исполнительного механизма, несущие губки для захвата изделий, в интервалах рабочего и холостого ходов совершают круговое движение, реализация которого между позициями «схват изделия» и «выдача изделия» в производственных условиях бывает затруднена размещением между упомянутыми позициями различных технологических средств и конструктивных элементов. Это снижает технологические возможности устройства и затрудняет оперативность обслуживания последнего. Недостаток прототипа предопределен тем, что выходное звено передаточного механизма, которое является ведущим звеном исполнительного механизма, совершает (помимо возвратно-поступательного движения) круговое движение. Увеличению габаритов устройства и рабочей площади, необходимой для его функционирования, также способствует раздельное размещение раздвижных клиньев для взаимодействия с выходными звеньями исполнительного механизма.
Задачей настоящего изобретения является расширение технологических возможностей и повышение удобств обслуживания комбинированного механизма.
Решение поставленной задачи достигается тем, что в комбинированном механизме со сложным движением выходных звеньев, содержащем передаточный механизм с выходным звеном, исполнительный механизм с выходными звеньями и губками для захвата изделий, в котором ведущим звеном является выходное звено передаточного механизма, привод, генерирующий движение звеньев, и стойку, передаточный механизм выполнен в виде кулачково-рычажно-зубчатого шестизвенника, который включает ведущее звено-кулачок, закрепленный на валу привода, сопряженный с кулачком толкатель, шатун, шарнирно связанный с толкателем, двуплечее коромысло, шарнирно связанное с шатуном и со стойкой, выходное звено, сопряженное с неподвижным зубчатым сектором и шарнирно связанное с коромыслом, при этом сопряжение выходного звена с неподвижным зубчатым сектором содержит шестерню, жестко закрепленную на конце выходного звена, соосно оси шарнирной связи выходного звена с коромыслом.
Выполнение передаточного механизма в виде кулачково-рычажно-зубчатого механизма имеет свои преимущества.
Кулачок, как ведущее звено, однозначно определяющее положение всех остальных звеньев механизма, обеспечивает любую продолжительность выстоев выходных звеньев исполнительного механизма на границах ходов. Такая возможность реализуется при взаимодействии толкателя с участками рабочего профиля кулачка, имеющими постоянные радиус-векторы. Это расширяет технологические возможности комбинированного механизма, упрощает его использование для передачи изделий различной массы.
Выходное звено передаточного механизма совершает движение, состоящее из двух простых движений: движется вместе с плечом коромысла и совершает поворотное движение, которое генерируется в результате взаимодействия шестерни с неподвижным зубчатым сектором. Как видим, выходное звено передаточного механизма, несущее выходные звенья исполнительного механизма с губками для захвата изделий, не совершает (в отличие от прототипа) кругового движения. Это делает предлагаемый комбинированный механизм более компактным и удобным для обслуживания. Кроме того, изменяя передаточное число между шестерней и зубчатым сектором, можно изменять характер поворотного движения выходного звена в интервалах ходов (ускорять, замедлять), обеспечивая таким образом свободный проход выходных звеньев и губок исполнительного механизма между позициями «схват изделия» и «выдача изделия». Эта возможность особенно важна при работе комбинированного механизма в составе технологической линии.
Предлагаемый комбинированный механизм поясняется чертежом.
На чертеже представлена кинематическая схема механизма.
Комбинированный механизм со сложным движением выходных звеньев содержит передаточный механизм 1, исполнительный механизм 2 с губками 3 для захвата изделий и привод (последний на чертеже не показан).
Механизм 1 выполнен в виде кулачково-рычажно-зубчатого шестизвенника, содержащего ведущее звено-кулачок 4, сопряженный с кулачком толкатель 5, шатун 6, шарнирно связанный с толкателем, двуплечее коромысло 7, шарнирно связанное с шатуном и со стойкой 8, выходное звено 9, сопряженное с неподвижным зубчатым сектором 10 посредством шестерни 11 и шарнирно связанное с коромыслом 7.
Механизм 2 выполнен в виде рычажно-кулачкового механизма, который включает ведущее звено, им является звено 9 передаточного механизма, выходные звенья 12 и 13, шарнирно связанные со звеном 9 посредством пальца 14, неподвижный копир 15 с фигурными пазами 16 и 17. На свободных концах выходных звеньев смонтированы ролики 18 и 19 для взаимодействия с пазами 16 и 17 соответственно. Губки 3 жестко закреплены на выходных звеньях 12 и 13, при этом упомянутое закрепление губок выполнено разъемным для возможности быстрой смены губок при переналадке механизма на передачу изделий другой формы. Форма губок соответствует форме передаваемых изделий. Этим обеспечивается жесткое сопряжение губок с изделием по большей части его периметра при захвате и переносе.
Шарнирная связь выходного звена 9 с двуплечим коромыслом 7 выполнена посредством пальца 20, жестко закрепленного на свободном конце одного из плеч коромысла. Шестерня 11, сопряженная с неподвижным зубчатым сектором 10, жестко закреплена на конце выходного звена соосно оси отверстия в теле выходного звена для связи с пальцем 20 коромысла 7.
Комбинированный механизм со сложным движением выходных звеньев работает следующим образом.
При работе привода кулачок 4 генерирует движение промежуточных и выходных звеньев комбинированного механизма соответственно структуре его кинематической цепи. На границах ходов толкатель 5 занимает положение при минимальном, либо при максимальном радиус-векторе кулачка, при этом на границах ходов губки 3 выстаивают в разжатом положении в течение определенного времени. При выстое в позиции «схват изделия» в разжатые губки подается изделие, а в позиции «выдача изделия» переданное из одной позиции в другую изделие выводится из механизма. При рабочем ходе губки занимают сжатое положение, при этом они контактируют с изделием, удерживая его при переносе из одной позиции в другую. Сжатое положение губок является результатом взаимодействия роликов 18 и 19 выходных звеньев 12 и 13 с фигурными пазами 16 и 17 в теле неподвижного копира 15. При холостом ходе губки также занимают сжатое положение, поскольку сохраняется взаимодействие роликов 18 и 19 с теми же фигурными пазами, что и при рабочем ходе.
При работе механизма двуплечее коромысло 7 совершает возвратно-поворотное движение с выстоями на границах интервалов рабочего и холостого ходов. Выстой такой же продолжительности совершает выходное звено 9, шарнирно связанное с одним из плеч коромысла. Синхронно с выстоем выходного звена 9 выстаивают выходные звенья 12 и 13 исполнительного механизма, обеспечивая при этом разжатое положение губок.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224639C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191109C1 |
| МАНИПУЛЯТОР ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2007 |
|
RU2346804C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331506C2 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2232672C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2276009C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2224638C2 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2303520C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2312008C1 |
| КОМБИНИРОВАННЫЙ МЕХАНИЗМ СО СЛОЖНЫМ ДВИЖЕНИЕМ ВЫХОДНЫХ ЗВЕНЬЕВ | 2006 |
|
RU2331507C1 |
Комбинированный механизм относится к средствам обслуживания машин и оборудования. Механизм содержит передаточный механизм, исполнительный механизм с губками для захвата изделий, в котором ведущим звеном является выходное звено передаточного механизма, привод и стойку. Передаточный механизм выполнен в виде кулачково-рычажно-зубчатого шестизвенника, который включает ведущее звено-кулачок, сопряженный с кулачком толкатель, шатун, шарнирно связанный с толкателем, двуплечее коромысло, шарнирно связанное с шатуном и со стойкой, выходное звено, сопряженное с неподвижным зубчатым сектором и шарнирно связанное с коромыслом. Сопряжение выходного звена с неподвижным зубчатым сектором содержит шестерню, жестко закрепленную на конце выходного звена, соосно оси шарнирной связи выходного звена с коромыслом. Исполнительный механизм содержит неподвижный копир с фигурными пазами, а на выходных звеньях исполнительного механизма смонтированы ролики для взаимодействия с этими пазами. Изобретение расширяет технологические возможности механизма и повышает удобства его в обслуживании. 1 ил.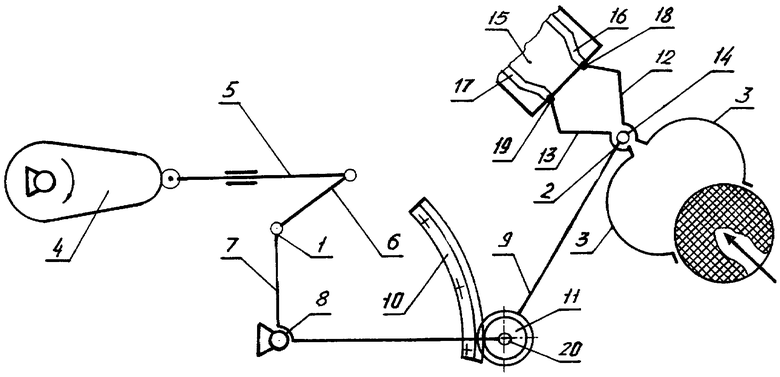
Комбинированный механизм со сложным движением выходных звеньев, содержащий передаточный механизм с выходным звеном, исполнительный механизм с выходными звеньями и губками для захвата изделий, в котором ведущим звеном является выходное звено передаточного механизма, привод, генерирующий движение звеньев, и стойку, отличающийся тем, что передаточный механизм выполнен в виде кулачково-рычажно-зубчатого шестизвенника, который включает ведущее звено-кулачок, сопряженный с кулачком толкатель, шатун, шарнирно связанный с толкателем, двуплечее коромысло, шарнирно связанное с шатуном и со стойкой, выходное звено, сопряженное с неподвижным зубчатым сектором и шарнирно связанное с коромыслом, при этом сопряжение выходного звена с неподвижным зубчатым сектором содержит шестерню, жестко закрепленную на конце выходного звена, соосно оси шарнирной связи выходного звена с коромыслом.
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2217296C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2265511C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2002 |
|
RU2191107C1 |
| УСТРОЙСТВО ТИПА "РУКА" ДЛЯ ПЕРЕДАЧИ ИЗДЕЛИЙ | 2004 |
|
RU2264907C1 |
| US 5539291 A, 23.07.1996. | |||

