сд ее со
Ci
Изобретение относится к электротехнике и может быть использовано в электроприводах постоянного тока,
Цель изобретения - повытение на- дежности электропривода.
На чертеже приведена схема электропривода.
Электропривод с контролем параметров содержит последовательно соеди- ненные задатчик 1, регуляторы 2 и 3 скорости и тока, преобразователь 4 и электродвигатель 5 постоянного тока, датчики 6 и 7 скорости и тока, выходы которых соединены с первыми входми соответственно первого 8 и второго 9 сзгмматоров, два компаратора 10 и 11, выходы которых подключены к входам блока 12 индикации, модель 13 преобразователя 4 и электро- двигателя 5, скоростной и токовый выходы которой соединены с вторыми входами соответственно первого 8 и второго 9 сумматоров, вход модели 13 подключен к выходу регулятора 3 тока, Устройст- во также содержит блоки 14 и 15 уставок ошибок по скорости и току, выходы которых соединены с первыми входами первого 0 и второго 11 компараторов соответственно, первый 16 и вто- рой 17 коммутирующие ключи, выходы которых подключены к входам обратных связей регулятора 2 скорости и регулятора 3 тока соответственно, два замыкающих ключа 18 и 19, входы которых соединены с выходами первого 10 и второго 11 компараторов соответственно, а выходы подключены к управляющим входам первого 16 и второго 17 коммутирующих ключей соответственно, первый и второй информационные входы первого коммутирующего ключа 16 соединены с выходом датчика 6 скорости и скоростным выходом модели 13 соответственно, первый и второй ин- формационные входы второго коммутирующего ключа 17 соединены с выходом датчика 7 тока и с токовым выходом модели 13 соответственно, выходы первого 8 и второго 9 сумматоров подключены к вторым входам первого 10 и второго 11 компараторов соответственно, управляющие входы первого 18 и второго 19 замыкающих ключей соединены со скоростным и токовым входом модели 13 соответственно,
Модель 13 тиристорного преобразователя 4 н электродвигателя 5 включает первое апериодическое звено 20,
5 0 5 Q
5
0
моделирующее преобразователь, последовательно соединенные третий сумматор 2I и второе апериодическое звено 22, моделирующее якорную цель электродвигателя, последовательно соединенные четвертый сумматор 23 и интегратор 24, моделирующие механическое движение электропривода, блок 25 коэффициентов, включенный между входом третьего сумматора 21 и выходом интегратора 24, являющегося скоростным выходом модели 13, блок 26 уставки момента нагрузки, подключенный к входу четвертого сумматора 23, другой вход которого соединен с выходом второго апериодического звена 22, являющегося боковым выходом модели 3.
Электропривод работает следующим образом.
Сигнал задатчика I через регуляторы скорости 2 и тока 3, тиристор- ный преобразователь 4 поступает на электродвигатель 5, В случае нормальной работы датчиков скорости 6 и тока 7 их сигналы через ключи 16 и I7 поступают на входы соответствующих регуляторов 2 и 3.
Одновременно сигнал с выхода регулятора 3 тока поступает на модель 13 тиристорного преобразователя 4 и электродвигателя 5.
Сигнал вычисленной скорости с выхода модели 13 и сигнал, пропорциональный измеренной скорости, с выхо, да датчика 6 скорости подаются на входы первого сумматора 8, сигнал на выходе которого
Ui К,(п„- Пр) ,
где К - коэффициент пропорциональности;
п„ - измеренная скорость; п J - вычисленная скорость; Сигнал и на входе первого компаратора 10 сравнивается с выходным сигналом и блока 14 уставки ошибки по скорости.
Ошибка при вычислении скорости образуется из-за изменяющихся в процессе работы момента инерции, сопротивления якорной цепи и момента нагрузки.
Величина U/j выбирается так, что бы в процессе нормальной работы обеспечивается и 1 U7 .
31
в случае отказа датчика 6 скорости его сигнал исчезает и
и, .
и
1
При этом на выходе первого компаратора 10 образуется сигнал, переключающий ключ 16 через второй ключ 18 и включающий блок 12 индикации.
Сигнал вычисленной скорости через второй вход ключа 16 поступает на вход регулятора 2 скорости, обеспечивая регулирование скорости электродвигателя 5.
Если происходит отказ в модели 13 тиристорного преобразователя Аи г электродвигателя 5 при исправном датчике 6 скорости и сигнал на скорос- iTHOM выходе- модели 13 отсутствует, то размыкается ключ 18 и при срабатывании первого компаратора 10 переключение ключа 16 не осуществляется, На вход регулятора 2 скорости поступает сигнал с датчика 6 скорости.
Сигнал вычисленного тока с токового выхода модели 13 и сигнал, пропорциональный измеренному току, с выхода датчика 7 тока подаются на входы второго сумматора 9, на выходе которого формируется сигнал
и, Кз („ ,)где К- - коэффициент пропорциональности;
|ц - измеренный ток; ig - вычислен гый ток.
Затем сигнал U на входе второго компаратора 11 сравнивается с сигналом Uj блока 15 уставки ошибки по току.
Величина U, выбирается так, что при нормальной работе датчика 7 тока второй компаратор 1I не срабатывает: УЗ Uy.
При отказе датчика 7 тока его сигнал исчезает I) 7, U.
На выходе второго компаратора 11 возникает сигнал, переключающий ключ 17 через ключ 19 и включающий блок 12 индикации.
Сигнал вычисленного тока через вход ключа 17 поступает на вход регулятора 3 тока, обеспечивая регулирование тока.
При отказе модели 13 тиристорного преобразователя 4 и электродвигателя 5 и исправно 1 датчике 7 тока сигнал на выходе модели 13 исчезает, ключ 19 размыкается, и при срабатывании второго компаратора 11 третий
153964
ключ- 17 не переключается. Сигнал с выхода датчика 7 тока поступает на вход регулятора 3 тока.
Таким образом, сравнение вычисленных и измеренных сигналов скорости и тока исключает ложное срабатывание устройства при отказе одного или обоих датчиков, а подключение каналов обратной связи при отказах датчиков к модели 13 тиристорного преобразователя 4 и электродвигателя 5 позволяет повысить надежность электропривода, так как обеспечивается регулирование скорости и тока с точностью до ошибки вычисления сигналов скорости и тока.
10
15
Формула изобретения
Электропривод с контролем параметров, содержащий последовательно соединенные задатчик, регуляторы скорости и тока, преобразовате,:), выход которого подключен к якорной обмотке электродвигателя постоянного тока, датчики скорости и тока злект родвига- теля, выходы которых соединены с первыми входами соответстве}1но первого и второго сумматоров, два компарато-. ра, выходы которых подключены к входам блока 1 идикации, модель тиристорного преобразователя и электродвигателя, скоростной и токовый ВЫХОД которой соединены с вторыми входами соответственно первого и второго сумматоров, вход модели подключен к выходу регулятора тока, отличающийся тем, что, с целью повышения надежности электропривода, в него введены блоки уставок . ошибок по скорости-и току, выходы которых соединены с первыми входами соответственно первого и второго компараторов, первый и второй коммутирующие ключи, выходы которых подключены к входам обратных связей соответственно регулятора скорости и регулятора тока, два замыкающих ключа, входы которых соединены с выходами соответственно первого и второго компараторов, а выходы подключены к управляющим входам соответственно первого и второго коммутирующих ключей, первый и лторой информационные входы первого коммутирующего ключа соединены соответствен1 о с выходом
датчика скорости и скоростным выходом модели, перевый и второй инфор51)53966
мационны входы второго коммутирую- рым входам соответственно первого и щего ключа соединены соответствен-.. второго компараторов, а управляющие но с выходом датчика тока и токовым входы первого и второго замыкающих выходом .модели, выходы первого и ключей соединены соответственно со второго сумматоров подключены к вто- скоростным и токовым выходами модели.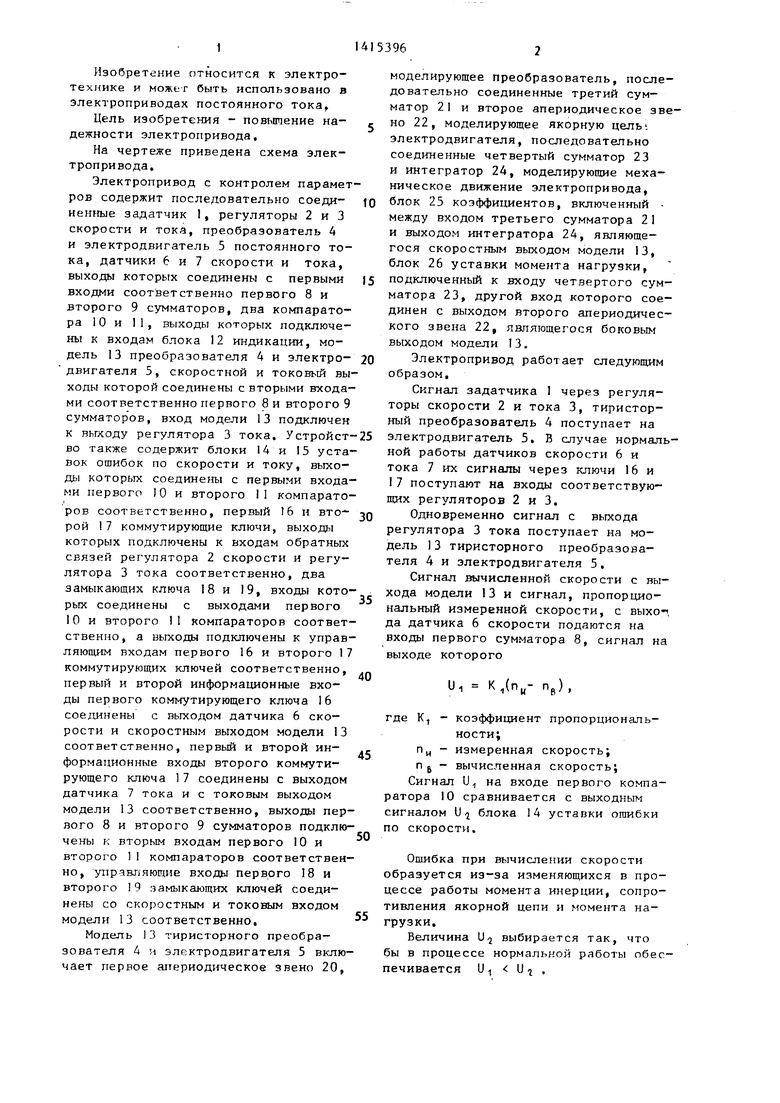
| название | год | авторы | номер документа |
|---|---|---|---|
| Электропривод постоянного тока | 1990 |
|
SU1767680A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Вентильный электропривод | 1989 |
|
SU1746482A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Электропривод осевой намотки | 1989 |
|
SU1737688A1 |
| Регулятор мощности дуговой электропечи | 1984 |
|
SU1264379A1 |
| СПОСОБ УПРАВЛЕНИЯ ВЕНТИЛЬНО-ИНДУКТОРНЫМ ЭЛЕКТРОПРИВОДОМ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2000 |
|
RU2182743C1 |
| ЭЛЕКТРОПРИВОД | 1992 |
|
RU2037262C1 |
| Устройство для вычисления статического момента вентильного электропривода | 1979 |
|
SU947880A1 |
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
Изобретение относится к электротехнике и может-быть использовано для измерения и контроля параметров электропривода. Целью изобретения является повьпиение надежности электропривода. Для этого выходы датчиков скорости 6 и тока 7 соединены с входами сумматоров 8,9, вторые входь которых подключены к выходам модели 13. Выходы сумматоров 8,9 подключены к входам компараторов 10, 11. Вторые входы компараторов 10,11 подключены к выходам блоков 14,15 уставок ошибок по скорости и току. При исправной работе датчиков 6,7 сигналы скорости и тока поступают на входы соответствующих регуляторов 2,3. При отказах датчиков 6,7 скорости или тока сигналы обратной связи подаются на входы соответствующих регуляторов 2,3 с выходов модели 13. При исправной работе датчиков 6,7 , и отказных в модели 13 сигналы обрат- ной связи поступают на входы регуляторов 2,3 с датчиков 6,7. 1 ил. С/)
| Походная разборная печь для варки пищи и печения хлеба | 1920 |
|
SU11A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Патент США № 4284237, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
