ТНК
NU
СО
го ел
О
Изобретение относится к области управления рабочими электроприводами одноковшовых экскаваторов и может быть использовано для управления электроприводами других промышленных установок, в которых тре- буется ограничение динамических нагрузок.
Цель изобретения - повышение надежности экскаватора путем снижения динамических нагрузок и улучшение температурного режима электропривода.
На фиг. 1 дана функциональная схема устройства; на фиг. 2 - принципиальная схема датчика тока нагрузки; на фиг. 3 - принципиальная схема регулятора снижения динамических нагрузок.
Поставленная цель достигается тем, что производится настройка параметров устройства для формирования управляющего воздействия исходя из критерия минимума квадратичного отклонения тока якорной цепи электропривода и скорости двигателя от их установившихся значений при минимуме расхода энергии.
При управляющем воздействии в целях более полного заполнения токовой диаграм- мы критерий оптимальности имеет вид
/, Г().
О
При возмущающем воздействии с целью ограничения динамических бросков тока кри- терий оптимальности .имеет вид
/ i-f(4 + Ai+t/)rf/. о
Исходя из указанных критериев,, для первого случая формируется математическая модель регулятора
.,
K2 ,
для второго случая: 4 - :i+aiiA,i-a2iA,
,
где , - соответственно ток .г joeWeHj
якорной цепи и скорость двигателя в относительных единицах.
6 cos Тб Me Та ai2 . , ;
io.Ь(,/аб./VOX
т,. ,
,
Мб
где Ra, La - активное и индуктивное сопротивление якорной цепи; /г - суммарный момент инерции; С - конструктивная постоянная; 6}a&, базовые значения времени, тока, скорости-двигателя и момента.
5
0
д
5
0
.г j
0
5
При этом на выходе регулятора формируется сигнал, равный
L/on iiiA,i,
, С/„ Тс, гдеЙ1 -:- .
Функционально устройство можно разделить на две цепи - цепь снижения динамических нагрузок и цепь ограничения температуры двигателя электропривода.
Устройство содержит командоаппарат 1, первый сумматор 2, тиристорный преобра зователь 3, а цепь снижения динамических нагрузок состоит из датчика 4 тока нагрузки, первый вход которого соединен с датчиком 5 тока, а второй вход - с датчиком 6 скорости. Выход датчика 4 тока нагрузки соединен с управляющим входом коммутирующего элемента 8. Первый вход регулятора 7 снижения динамических нагрузок соединен с датчиком 6 скорости, а второй вход - с датчиком 5 тока. Выход регулятора 7 соединен с первым входом первого сумматора 2, второй вход которого соединен с командоаппаратом 1, а выход соединен с тиристорным преобразователем 3.
Датчик 4 тока нагрузки реализуется на инвертирующем дифференциаторе 9, вход которого соединен с вторым входом датчика тока нагрузки, а выход - с вторым входом суммирующего фильтра 10, первый вход которого соединен с первым входом датчика тока нагрузки, а выход через нелинейный элемент ) 1 соединен с управляющим входом коммутирующего элемента 8.
Регулятор 7 снижения динамических нагрузок реализуется на сумматоре 12, второй вход которого соединен с вторым входом регулятора, первый вход сумматора через инвертирующий усилитель 13 соединен с выходом интегратора 14. Выход сумматора 12 через интегратор 15 соединен с вторым вхо-. дом сумматора 16, первый вход которого через контакт коммутирующего элемента 8 соединен с первым входом регулятора 7 снижения динамических нагрузок, а третий вход сумматора 16 через инвертируемый усилитель 17 соединен с выходом интегратора 14, выход которого через инвертирующий усилитель 18 соединен с выходом регулятора 7 снижения динамических нагрузок.
Цепь ограничения температуры двигателя состоит из датчика 19 температур, соединенного через первый пороговый элемент 20 с первым входом второго сумматора 21, второй вход которого соединен с датчиком 5 тока, а выход через второй пороговый элемент 22 - с третьим входом первого сумматора 2.
Устройство работает следующим образом.
В том случае, если значение тока нагрузки не превыщает заданное, определяемое пороговым элементом 11, коммутирующий эле
мент 8 разомкнут и на вход регулятора 7 поступает сигнал только с датчика 6 скорости. Происходит управление согласно системе уравнений (1).
В случае, если значение тока нагрузки превышает заданное, срабатывает коммути- рующий элемент 8 и на первый вход регулятора 7 снижения динамических нагрузок поступает сигнал с датчика 5 тока, сигнал с датчика 6 скорости остается. Происходит управление согласно системе уравнений (2).
В том случае, если температура двигателя превышает заданное значение, определяемое пороговым элементом 20, на сумматоре происходит сложение сигналов с выхода порогового элемента 20 и датчика 5 тока. Если сумма превышает значение, определяемое вторым пороговым элементом 22, то сигнал поступает на сумматор 2 и происходит снижение тока якоря.
Датчик 4 (фиг. 2) выполнен на усилителях 23-25, входных резисторах 26-29, резисторах 29-31 обратной связи, конденсаторах 32 и 33 и стабилитронах 34 и 35. Инвертирующий дифференциатор 9 реализован на усилителе 25, в обратной связи которого включен резистор 31, а на входе включен конденсатор 33, который подключен к второму входу датчика 4 тока нагрузки. Суммирующий фильтр 10 выполнен на уси- лителе 24, в обратной связи которого включены резистор 30 и конденсатор 32. Вход усилителя 24 через резистор 27 соединен с выходом усилителя 25, а через резистор 28 - с первым входом датчику 4 тока нагрузки. Выход усилителя 24 подключен к стабилитрону 35. Нелинейный элемент 11 выполнен на встречно вк-тюченных стабилитронах 34 и 35, подключенных через резистор 26 к усили- телю 23, в обратной связи которого включен резистор 29.
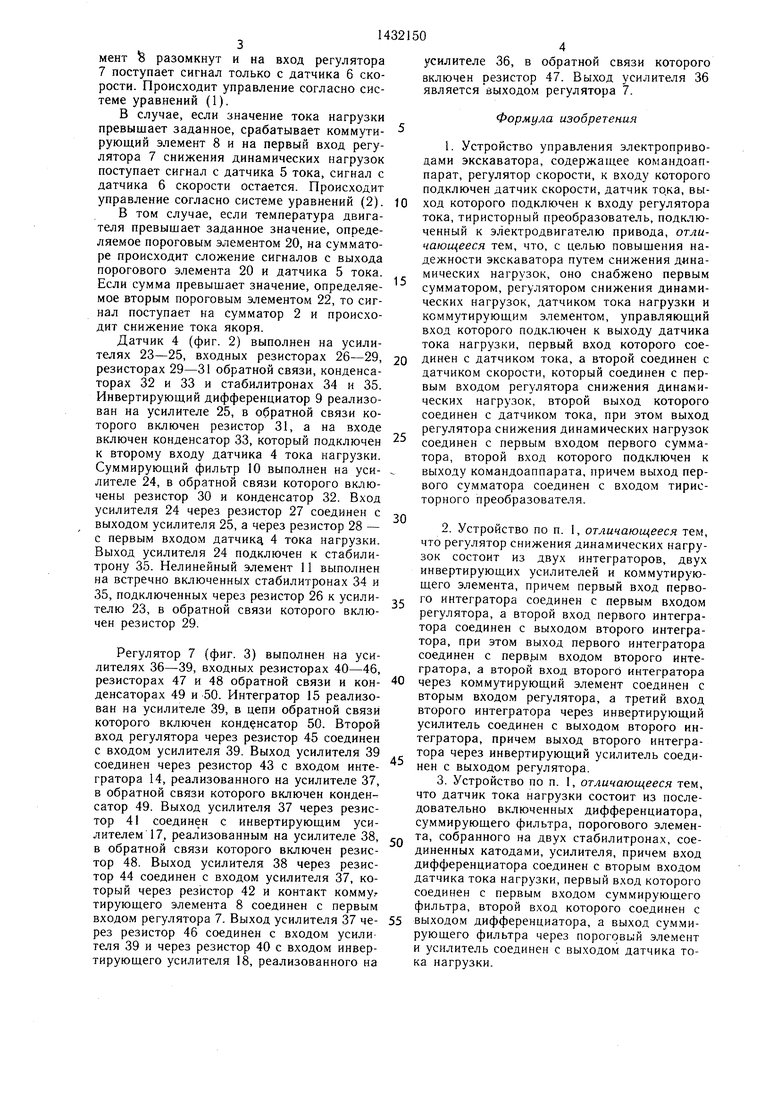
Регулятор 7 (фиг. 3) выполнен на усилителях 36-39, входных резисторах 40-46, резисторах 47 и 48 обратной связи и конденсаторах 49 и 50. Интегратор 15 реализован на усилителе 39, в цепи обратной связи которого включен конденсатор 50. Второй вход регулятора через резистор 45 соединен с входом усилителя 39. Выход усилителя 39 соединен через резистор 43 с входом интегратора 14, реализованного на усилителе 37, в обратной связи которого включен конден- сатор 49. Выход усилителя 37 через резис40
45
2.Устройство по п. I, отличающееся тем, что регулятор снижения динамических нагрузок состоит из двух интеграторов, двух инвертирующих усилителей и коммутирующего элемента, причем первый вход первого интегратора соединен с первым входом регулятора, а второй вход первого интегратора соединен с выходом второго интегратора, при этом выход первого интегратора соединен с перв{ 1м входом второго интегратора, а второй вход второго интегратора через коммутирующий элемент соединен с вторым входом регулятора, а третий вход второго интегратора через инвертирующий усилитель соединен с выходом второго интегратора, причем вы.ход второго интегратора через инвертирующий усилитель соединен с выходом регулятора.
3.Устройство по п. 1, отличающееся тем, что датчик тока нагрузки состоит из последовательно включенных дифференциатора, суммирующего фильтра, порогового элементор 4 соединен с инвертирующим усилителем 17, реализованным на усилителе 38,сп та, собранного на двух стабилитронах, сое- в обратной связи которого включен резис-диненных катодами, усилителя, причем вход тор 48. Выход усилителя 38 через резис-дифференциатора соединен с вторым входом тор 44 соединен с входом усилителя 37, ко-датчика тока нагрузки, первый вход которого торый через резистор 42 и контакт комму.-соединен с первым входом суммирующего тирующего элемента 8 соединен с первымфильтра, второй вход которого соединен с входом регулятора 7. Выход усилителя 37 че-55 выходом дифференциатора, а выход сумми- рез резистор 46 соединен с входом усили-рующего фильтра через пороговый элемент теля 39 и через резистор 40 с входом инвер-и усилитель соединен с выходом датчика то- тирующего усилителя 18, реализованного нака нагрузки.
5
0
5 ,, j-
0
0
5
усилителе 36, в обратной связи которого включен резистор 47. Выход усилителя 36 является выходом регулятора 7.
Формула изобретения
1.Устройство управления электроприводами экскаватора, содержащее командоап- парат, регулятор скорости, к входу которого подключен датчик скорости, датчик то,ка, выход которого подключен к входу регулятора тока, тиристорный преобразователь, подключенный к электродвигателю привода, отличающееся тем, что, с целью повыщения надежности экскаватора путем снижения динамических нагрузок, оно снабжено первым сумматором, регулятором снижения динамических нагрузок, датчиком тока нагрузки и коммутирующим элементом, управляющий вход которого подключен к выходу датчика тока нагрузки, первый вход которого соединен с датчиком тока, а второй соединен с датчиком скорости, который соединен с первым входом регулятора снижения динамических нагрузок, второй выход которого соединен с датчиком тока, при этом выход регулятора снижения динамических нагрузок соединен с первым входом первого сумматора, второй вход которого подключен к выходу командоаппарата, причем выход первого сумматора соединен с входом тирис- торного преобразователя.
2.Устройство по п. I, отличающееся тем, что регулятор снижения динамических нагрузок состоит из двух интеграторов, двух инвертирующих усилителей и коммутирующего элемента, причем первый вход первого интегратора соединен с первым входом регулятора, а второй вход первого интегратора соединен с выходом второго интегратора, при этом выход первого интегратора соединен с перв{ 1м входом второго интегратора, а второй вход второго интегратора через коммутирующий элемент соединен с вторым входом регулятора, а третий вход второго интегратора через инвертирующий усилитель соединен с выходом второго интегратора, причем вы.ход второго интегратора через инвертирующий усилитель соединен с выходом регулятора.
3.Устройство по п. 1, отличающееся тем, что датчик тока нагрузки состоит из последовательно включенных дифференциатора, суммирующего фильтра, порогового элеменп та, собранного на двух стабилитронах, сое- диненных катодами, усилителя, причем вход дифференциатора соединен с вторым входом датчика тока нагрузки, первый вход которого соединен с первым входом суммирующего фильтра, второй вход которого соединен с 5 выходом дифференциатора, а выход сумми- рующего фильтра через пороговый элемент и усилитель соединен с выходом датчика то- ка нагрузки.
4. Устройство по п. 1, отличающееся тем, что, с целью улучшения температурного ре- |(има электропривода, оно снабжено датчиком температуры, первым и вторым пороговыми элементами и вторым сумматором, гричем выход датчика температуры через
первый пороговый элемент соединен с первым входом второго сумматора, второй вход которого соединен с датчиком тока, а выход второго сумматора через второй пороговый элемент соединен с третьим входом первого сумматора.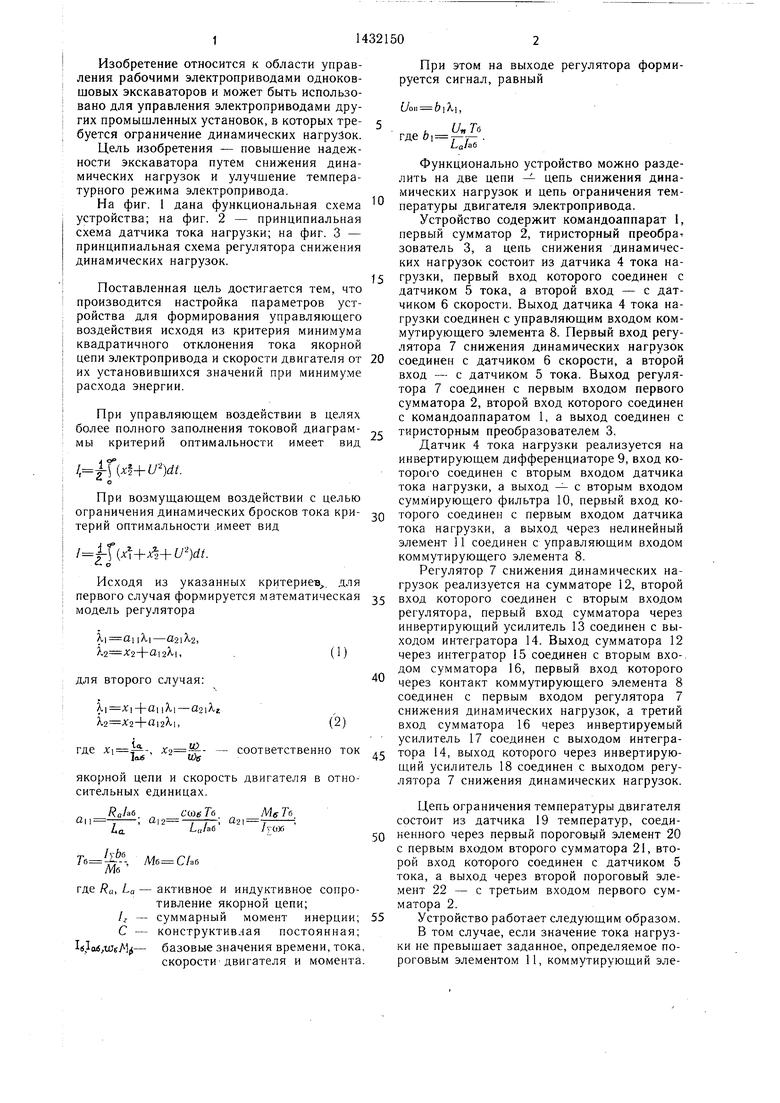
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| Устройство для ограничения динамических нагрузок копающих механизмов экскаватора | 1990 |
|
SU1740571A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство управления электроприводами копающих механизмов экскаватора | 1986 |
|
SU1511343A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1382919A1 |
| Устройство для ограничения динамических нагрузок в экскаваторных механизмах | 1986 |
|
SU1416627A1 |
| Устройство комбинированного управления электроприводом поворота экскаватора | 1990 |
|
SU1810440A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1420127A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1781392A1 |
Изобретение относится к управлению рабочими электронриводами одноковшовых экскаваторов. Цель изобретения - повышение надежности путем снижения динамических нагрузок и улучшение температурного режима электропривода. Устройство включает командоаппарат I, сумматор (С) 2, тиристорный преобразователь 3, датчик 4 тока нагрузки, датчик 5 тока якоря, датчик 6 скорости, регулятор (Р) 7 снижения динамических нагрузок, состоящий из С 12, 16 и интеграторов 14, 15. При величине тока нагрузки меньше заданного на вход Р 7 подается сигнал скорости. Происходит управление по одному параметру скорости. При величине тока нагрузки больп,1е заданного срабатывает коммутирующий элемент 8, и на вход Р 7 подается сигнал с датчика 5. Происходит управление по двум параметрам скорости и тока. Цепь ограничения температуры двигателя включает датчик 19 температуры, пороговые элементы 20, 22. С 2. При температуре двигателя, превышающей опорное значение элемента 20, на С 21 сигнал с выхода элемента 20 складывается с сигналом тока. Ес,1И сумма превышает опорное значение элемента 22, сигнал поступает на С 2, при этом происходит снижение тока якоря. 3 з.п.ф-лы, 3 ил. $ (Л
2J.
25
1
J- / 35 Й
| Способ управления электроприводами одноковшового экскаватора | 1976 |
|
SU615184A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Н | |||
| Eisele, Vance А | |||
| М | |||
| Parollel | |||
| Control sistem Regulates Motor Speed and Targue.- Westinghause ENGINEER, July, 1966. | |||
