(46) 07.12.90. Бюл. № 45
(21)4a284JA/3 -JJ
(22)24.09.86
(71)Красноярский политехнический институт
(72)В.Г.Анопченко
(53)629.113.012.13(088.8)
(56) Авторское свидетельство СССР 1235094, кл. В 60 В:19/00, 1984.
(54)КОЛЕСО тШ111тоР ФОРМЫ для
ТРАНСПОРТНОГО СРЕДСТВА (57) Изобретение относится к колесам изменяемой геометрии. Цель изобретения - повышение проходимости на слабонесущем грунте и при преодолении препятствий. Колесо состоит из кругового обода, состоящего из шар- яирно соединенных секций 6, число которых кратно четырем и минимальное их число равно восьми. Каждый второй
шарнир 5 соединен с силовыми приводами 4, смонтированными на двух половинах ступицы, которые на ведущем валу смонтированы с помощью дифференциала. По крайней мере одна пара смежных секций 6 имеет ограничители 7 их поворота внутрь колеса. При полностью вьщвинутых силовых приводах 4 обод колеса имеет форму окружности, что необходимо при движении по твердому грунту. При движении по слабонесущему грунту силовые приводы утаыпшают- ся, обод приобретает лепестковую форму и колесо передвигается комбинированным ходом, состоящим иэ фазы шагания (изменения формы колеса при неподвижных секциях 6, опирающихся на грунт) и фазы качения его на одной или двух секциях обода и вокруг шарнира 5. 5 ил.
о 9
(Л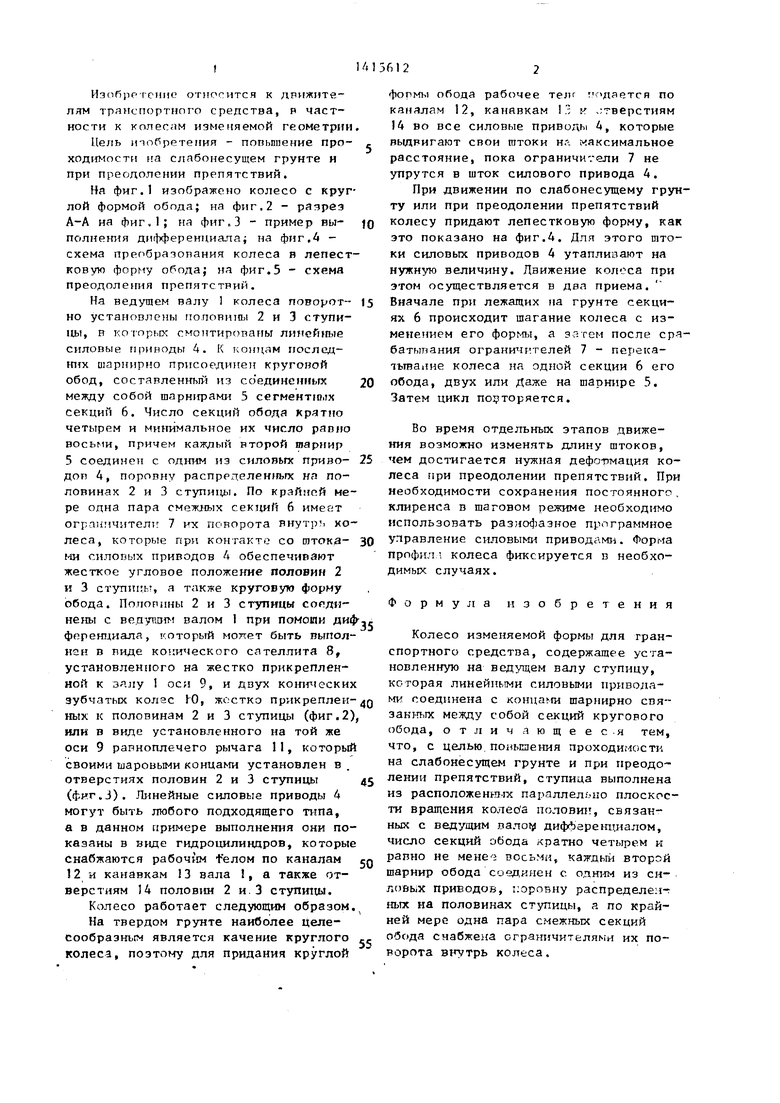
| название | год | авторы | номер документа |
|---|---|---|---|
| Колесо изменяемой формы | 1988 |
|
SU1526081A1 |
| Ведущее колесо транспортного средства | 1988 |
|
SU1652102A1 |
| Амфибийное транспортное средство высокой проходимости | 2019 |
|
RU2708798C1 |
| КОЛЕСНО-ШАГАЮЩИЙ ДВИЖИТЕЛЬ | 1992 |
|
RU2038248C1 |
| КОЛЕСНЫЙ ДВИЖИТЕЛЬ | 2004 |
|
RU2280562C2 |
| Движитель транспортного средства | 1986 |
|
SU1604632A1 |
| Движитель транспортного средства | 1977 |
|
SU1491741A1 |
| САМОХОДНАЯ ШАГАЮЩАЯ ТЕЛЕЖКА МНОГООПОРНОЙ МНОГОСЕКЦИОННОЙ ДОЖДЕВАЛЬНОЙ МАШИНЫ КРУГОВОГО ДЕЙСТВИЯ | 2012 |
|
RU2495562C1 |
| Транспортное средство повышенной проходимости Колобова К.А. | 1989 |
|
SU1717426A1 |
| ВОЕННАЯ ГУСЕНИЧНАЯ МАШИНА | 2004 |
|
RU2279628C2 |
ел
о
H3(i6pfтемно относится к движителям транспортного средства, в частности к колесим изменяемой геометрии
Цель ипобрете1гия - попьппение про- ходимости на слабонесущем грунте и при преодолении препятствий.
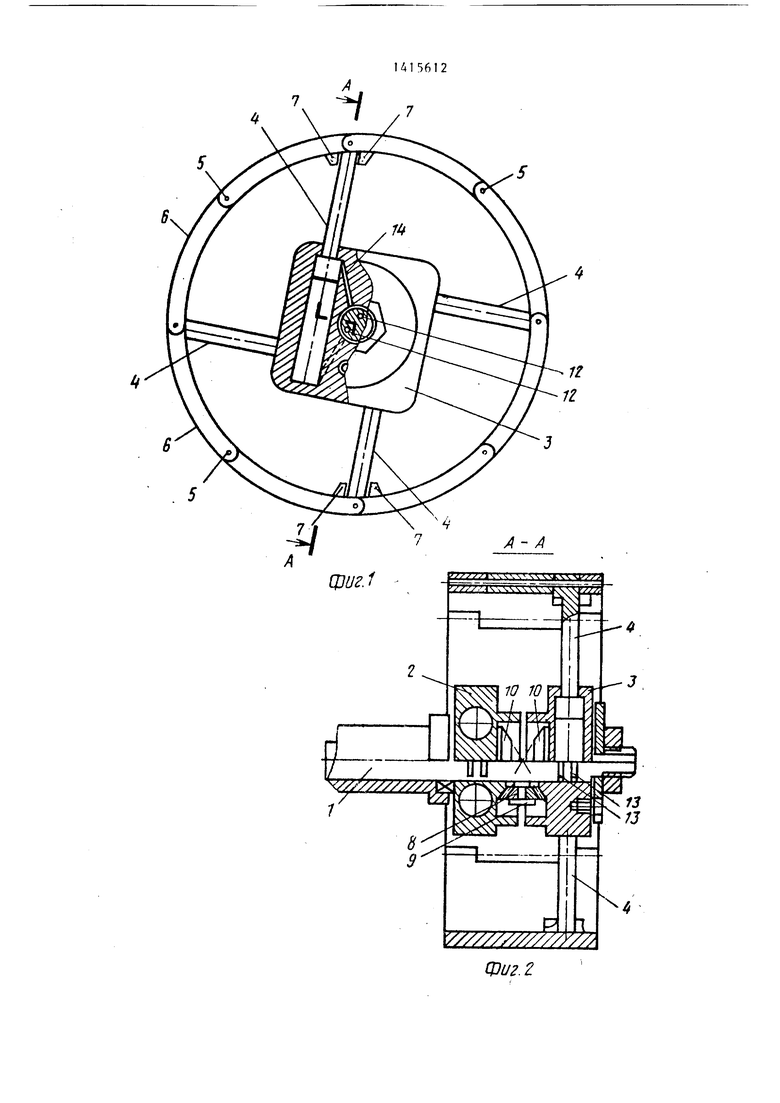
На фиг.1 изображено колесо с круглой формой обода; на фиг,2 - разрез А-А иа фиг.1; ня фиг.З - пример вы- полпенни дифференциала; на фиг.4 - схема преобразопания колеса в лепестковую форму обода; на фиг.5 - схема преодоле}П1Я препятствий.
На ведущем валу 1 колеса поворот-- но установлены половины 2 и 3 ступицы, в которых смонтированы лиисГигые силовые приводы 4. К концам послод- ттх шарнирно присоелииеи кругоной обод, составленныу из со единенных меящу собой шартфами 5 сегмент п 1х секций 6. Число секций обода крятпо четырем и ми}пчмальное их число равно восьми, Причем каждый второй шарнир 5 соединен с одним из силовых приво- доп 4, поровну распределенных на половинах 2 и 3 ступи1ц 1. По крайней мере одна пара смежлых сек1у1й 6 имеет ограинчител 7 их поворота внутрь колеса, которые при контакте со штока- ми силовых приводов А обеспечивают жесткое угловое положение половин 2 и 3 ступшгь, а также круговую форму обода. Полопины 2 и 3 ступицы соединены с ведушл валом 1 при помсии диф ферешдиала, который монет быть выполнен в виде конического сателлита 8, установленного на жестко прикрепленной к зя.лу 1 оси 9, и двух конт еских зубчатых колас Ю, жестко прикрепленных к половинам 2 н 3 ступицы (фиг.2) или в виде установленного на той же оси 9 равноплечего рычага 11, который своими шаровыми концами установлен в отверстиях половин 2 и 3 ступицы
(фиг.З). Линейные силовые приводы 4 могут быть любого подходящего типа, а в данном примере выполнения они показаны в виде гидроцилиндров, которые снабжаются рабочда teлoм по каналам 12 и канавкам 13 вала , а также отверстиям 14 ПОЛОВ1Ш 2 и.3 ступицы.
Колесо работает следующим образом
На твердом грунте наиболее целесообразным является качение круглого колеса, поэтому для придания круглой
формы обода рабочее телг пг дается по каналам 12, канавкам 13 г-: ,;тверстиям 14 во все силовые приводь 4, которые выдвигают свои гатоки на максимальное расстояние, пока ограничители 7 не упрутся в шток силового привода 4.
При движении по слабонесущему груту или при преодолении препятствий колесу придают лепестковую форму, ка это показано на фиг.4. Для этого штоки силовых приводов 4 утапливают на нужную величину. Движение колоса при этом осуществляется в дна приема. Вначале при лежащих на грунте секциях 6 происходит шагание колеса с изменением его форг-1Ы, а затем после ср батыпания ограничителей 7 - перека- 1ъгаа ие колеса иа одной секции 6 его обода, двух или Даже на шарнире 5. Затем цикл повторяется.
Во время отдельных этапов движения возможно изменять длину штоков, чем достигается нужная дефо-пмация колеса при преодолении препятствий. При необходимости сохранения постоянного клиренса п шаговом режиме необходимо использовать )азное программное управление силовыми приводами. Форма профил 1 колеса фиксируется в необходимых случаях.
Формула изобретения
Колесо изменяемой формы для транспортного средства, содержащее установленную на ведущем валу ступицу, которая линейными силовьми приводами соединена с концами шарнирно свя- между собой кругового обода, ОТ.Г1ИЧ ающеес-я тем, что, с целью, поиьппения проходимости на слабонесущем грунте и при преодолении препятствий, ступица выполнена из расположенш.1х параллельно плоскости вращения колес а половшт, связанных с ведущим вало дифферетхиалом, число секций обода кратно четырем и рапно не восьми, каждый второй шарнир обода соед,инен с одним из си- ловых приводов, 1;ороБну распределен ных иа половинах ступицы, а по крайней мере одна пара смежных секций о5ода снабжена ограничителями их поворота колеса.
фиг. 2
Фиг
;
//
-
-:
Г
