Фиг.1
1U
Изобретение относится к системам управления электроприводами механизмов подъема и напора одноковгаового экскаватора и. предназначено для ограничения тока якорной цепи при работе экскаваторов в экстремальных условиях при отрицательных температурах до минус 60°С.
Цель изобретения - повышение надежности одноковшовых экскаваторов при комплексном воздействии ветровой нагрузки, отрицательных температур и скорости их изменения.
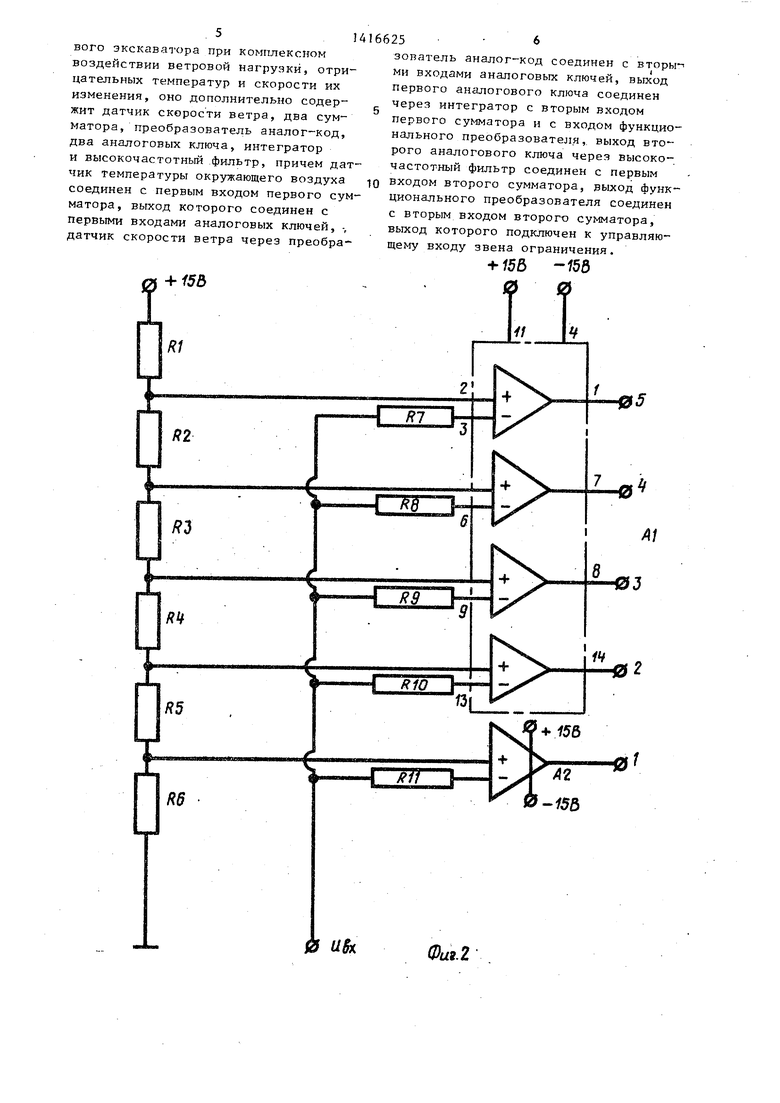
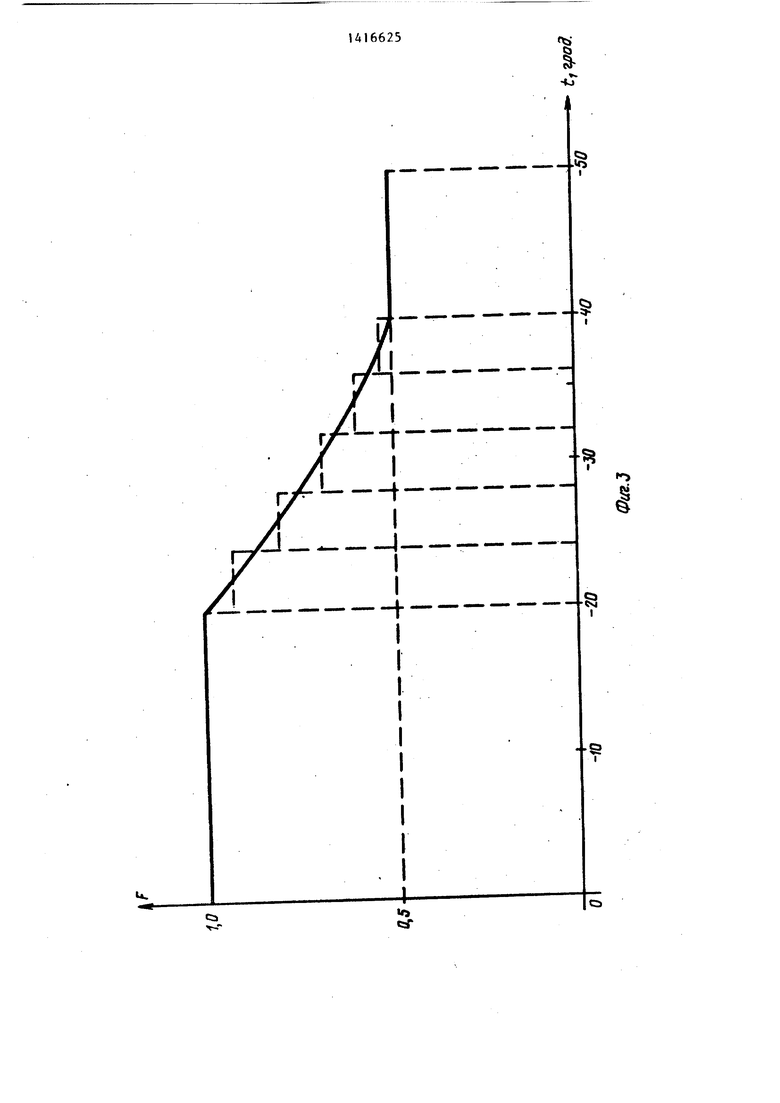
На фиг. 1 изображена блок-схема устройства; на фиг. 2 - функциональная схема преобразователя аналог-код на фиг. 3 - график снижения нагрузки в зависимости от уровня отрицательны температур.
Устройство включает систему управления главным приводом, состоящую из последовательно соединенных командо- аппарата 1, регулятора 2 ЭДС со звеном ограничения 3 в цепи обратной связи и регулятора 4 тока. Система управления подключена к преобразователю 5 электрической энергии с присоединенным к нему двигателем 6.
Датчик 7 температуры воздуха подключен к первому входу первого суммато- ра 8 сигналов; выход первого сумматора 8 сигналов соединен с первыми входами первого 9 и второго 10 аналоговых ключей; выход первого аналогового ключа 9 соединен с входом интегратора 1I выход интегратора 11 соединен с вторым входом первого сумматора 8 сигналов и входом функционапьного преобразователя 12, выход которого соединен с первым входом второго сум матора 13 сигналов; датчик 14 скорости ветра подключен к входу преобразователя 15 аналог-код; выход преобразователя 15 аналог-код соединен со вторыми входами первого 9 и второго 10 аналоговых ключей; выход второго аналогового ключа 10 соединен с входом фильтра 16 высоких частот; выход фильтра 16 высоких частот соединен со вторь м входом второго cyi fMaTO ра 13 сигналов; выход второго сумматора сигналов соединен с входом звена 3 ограничения.
При комплексном воздействии на металлоконструкцию экскаватора экстремальных климатических условий устройство работает следующим образом.
166252
При низкой отрицательной темпера-туре и ветровой нат рузке сигнал от термодатчика 7 подается на вход сум- , матора 8, который совместно с аналоговым ключом 9 и интегратором 11 позволяет учитывать тепловую инерционность металлоконструкции, которая описывается уравнением
10
- ДТ uTg- ,
(1)
где &Т
перепад температур в металлоконструкции;
йТд - начальная разность температур; . температурная постоянная
времени металлоконструкции, и изменять во времени величины до- пустимых нагрузок на металлоконструкцию по мере изменения ее температуры. Блоки 7-9 и I1 реализуют зависимость СО и на выходе блока 11 имеется сигнал, пропорциональный темпе- ратуре внутренних слоев металлоконструкции.
Постоянная времени Z зависит от скорости ветра V согласно формуле
1-К,
(К
1+V,
6
-).
(2)
где К, - при V ;
I Л1К
V - УВ (м/с). 10 (м/с)
с тепловая постоянная времени при Vg, О.
Скорость ветра измеряется датчиком 14 скорости ветра, а преобразователь 15 аналог-код формирует импульсы, поступающие на второй вход аналогового ключа 9, частота f которых определяется зависимостью
45
Р - т -4- V 17 Дв В
где f д,„ц - минимальная частота импульсов 15 при Vg О; - коэффициент передачи дат- 50чика скорости ветра.
Функционирование устройства 7-12, реализующего зависимость (1) и (2) с погрешностью S 10%, определяется следующим уравнением: 55
и,.
Кдт Т в
t«(f
мин Ав R
Т р.
(3)
где К
Д.Т
.3141
коэффициент передачи датчика .температуры; С - постоянная интегрирования
интегратора;
t J, - длительность импульсов преобразователя ;
и у - напряжение на выходе интегратора ,
Таким образом, устройство позволяет учитывать при работе экскаваторов не только уровень отрицательной температуры непосредственно металла машины, но и неблагоприятное воздействие ветровой нагрузки.
С выхода сумматора 8 сигнал коммутируется аналоговым ключом 10 и подается на фильтр высокочастотный 16. Ключ 10 управляется импульсами преобразователя 15. Симметричная работа ключей 9 и 10 позволяет выделит на выходе фильтра 16 сигнал, пропорциональный входному напряжению интегратора 11, что соответствует скорости изменения температуры металлоконструкции экскаватора.
Сигнал Иф на выходе фильтра 16 связан с выходным сигналом И сумматора 8 выражением
6625
где Е - модуль нормальной упругости; d - коэффициент линейного расширения.
Как следует из выражений - выход-i ной сигнал Ицр фильтра 16 пропорционален .термическим напряжениям метапло- конструкций ( . Этот сигнал подается на второй вход сумматора 13.
Сигнал Hj, с выхода интегратора 11 подается на вход функционального преобразователя 12, который в соответствии с кривой (фиг. 3) ограничивает уровень загрузки привода с учетом величины сигнала И„. Выходом пре- образЪвателя 12 является напряжение , величина которого определяется входным сигналом И,. Б интервале температур до минус 20 С блок 13 реализует зависимость
и,,„ И, - и,
в опасном интервале температур от минус 20 до 0 С реализуется зависимость :
И
БЫК
И ,р - И 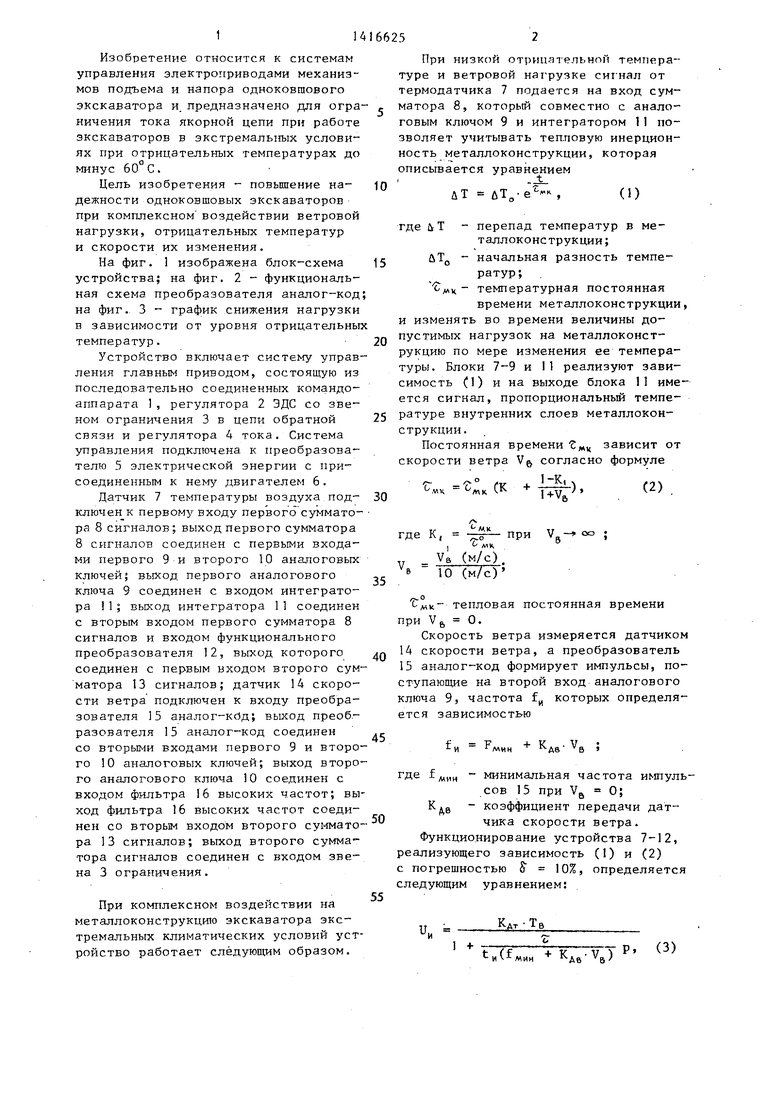

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1420127A1 |
| Устройство для контроля силового режима металлоконструкций горно-транспортных машин | 1985 |
|
SU1305274A1 |
| Способ управления электроприводом одноковшового экскаватора и устройство для его осуществления | 1988 |
|
SU1629423A1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Устройство для ограничения динамических нагрузок в экскаваторных механизмах | 1986 |
|
SU1416627A1 |
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
| Система позиционирования электропривода с энергетической оптимизацией при двухзонном регулировании скорости | 1991 |
|
SU1820361A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
Изобретение относится к управлению электроприводами механизмов подъема и напора одноковшового экскаватора. Цель - повышение надежно- сти экскаваторов при комплексном воздействии ветровой нагрузки, отрица- . тельных т-р и скорости их изменения. Для этого устр-во дополнительно содержит датчик 14 скорости ветра, два сумматора (С) 8, 13, преобразователь (П) 15 аналог-код, два аналогр- .вых ключа 9, 10, интегратор 11 и высокочастотный фильтр 16. С первым входом С 8 соединен датчик 7 т-ры окружающего воздуха, с вторым входом С 8 и- входом функционального П 12 через интегратор 11 соединен выход ключа 9. Выход ключа 10 через фильтр 16 соединен с первым входом второго С 13, с вторым входом которого соединен выход Л 12. Выход С 8 соединен с первы - ми входами ключей 9, 10, а выход С 13 - с управляющим входом звена 3 ограничения, соединенного с регулятором тока 4. С вторыми входами ключей 9, 10 через П 15 аналог-код соединен датчик 14 скорости ветра. Соединенный с датчиком 7 т-ры С 8 совместно с ключом 9 и интегратором 11 позволяет учитывать тепловую инерционность металлоконструкции (МК) и изменять во . времени величины допустимых нагрузок на MJ по мере изменения ее т-ры. С выхода С 8 сигнал коммутируется клю-т . чом 10 и подается на фильтр 16. Ключ 10 управляется импульсами П 15, свя занного с датчиком 14. Симметричная работа ключей 9 и 10 позволяет выделить на выходе фильтра 16 сигнал, пропорциональный входному напряжению интегратора П, что соответствует скорости изменения т-ры МК. 3 ил. (Л 05 & tsS 01
и и
(4)
Сигнал Hfl на выходе интегратора 11 пропорционален температуре металлоконструкции экскаватора и связан с И выражением
-и
- с
dHu dt
(5)
dTv
dT
(6)
Разность температур в металле пропорциональна скорости изменения температуры
S г
(7)
и вызьшает термические напряжения , которые увеличивают на грузки на металлоконструкцию и способствуют хрупким разрушениям
ер ± 5 Е,,
(8)
30
В интервале температур минус 40- 50 С устройство управления работает с максимальным ограничением, так как
5
0
5
0
5
И
ВЬ1
сумматора становится меньше величины .напряжения ограничения блока 3, заложенного в схему по рекомендациям завода-изготовителя. При достижении температуры минус 50 С производится остановка экскаватора в соответствии с инструкцией по эксплуатации завода- изготовителя .
Устройство позволяет автоматически дифференцированно регулировать величины стопорных токов главных электроприводов экскаватора с учетом экстремальных условий эксплуатации.
Формула изобретения
Устройство управления электроприводом одноковшового экскаватора, .содержащее командоаппарат, подключен- ный через параллельно соединенные регулятор ЭДС и звено ограничения к . регулятору тока, которьтй соединен с электроприводом, а также датчик температуры окружающего воздуха и функциональный преобразователь, о т- личающееся тем, что, с целью повьшения надежности одноковшо514
вого экскаватора при комплексном воздействии ветровой нагрузки, отрицательных температур и скорости их изменения, оно дополнительно содержит датчик скорости ветра, два сумматора, преобразователь анало -код, два аналоговых ключа, интегратор и высокочастотный фильтр, причем датчик температуры окружающего воздуха соединен с первым входом первого сумматора, выход которого соединен с первыми входами аналоговых ключей, -, датчик скорости ветра через преобра+ Г55
0 118
25
зователь аналог-код соединен с вторы-i ми входами аналоговых ключей, выход первого аналогового ключа соединен через интегратор с вторым входом первого cy 1мaтopa и с входом функционального преобразователя, выход второго аналогового ключа через высокочастотный фильтр соединен с первым входом второго сумматора, выход функционального преобразователя соединен с вторым входом второго сумматора, выход которого подключен к управляющему входу звена ограничения.
+ 155 -155
8
0J
Фм.2
4-5
-8
| Способ управления электроприводами одноковшового экскаватора | 1976 |
|
SU615184A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1983 |
|
SU1090813A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
