перемещение р - а/а, причем в качестве базовых для тока, момента, скорости и потока приняты их номинальные значения, для времени ш /Мн, для перемещения , где J - приведенный к валу двигателя суммарный момент инерции привода. Система содержит блок 1 задания перемещения, сумматор 2, первый счетчик 3 импульсов, первый преобразователь 4 код-частота, блок 5 ограничения частоты, формирователь 6 импульсов, первый интегратор 7, цифроаналоговый преобразователе 8, первый и второй блоки 9 и 10 ограничения амплитуды, первый и второй блоки 11 и 12 регулирования, двигатель 13 постоянного тока независимого возбуждения, импульсный датчик 14 перемещения, блок 15 задания времени перемещения, генератор 16 эталонной частоты, первый и второй ключи 17 и 18, первый и второй преобразователи 19 и 20 частоты, второй счетчик 21 импуль- сов, блок 22 сравнения кодов, блок 23 фиксации параметров токовой диаграммы, умножитель 24 кодов, второй интегратор 25, преобразователь 26 аналог-код, второй преобразователь 27 код-частота и датчик 28 потока.
Система представляет собой многоконтурную систему автоматического регулирования и включает в себя аналоговый контур регулирования скорости, содержащий первый блок 11 регулирования, двигатель 13 и второй блок- 10 ограничения амплитуды, цифровой контур регулирования скорости, содержащий замкнутый аналоговый контур регулирования скорости, импульсный датчик 1.4 перемещения, формирователь 6 импульсов, первый интегратор 7, цифроаналоговый преобразователь 8 и первый блок 9 ограничения амплитуды, цифровой контур регулирования положения, содержащий замкнутый цифровой контур регулирования скорости, сумматор 2, первый преобразователь 4 код- частота, блок 5 ограничения частоты, и первый счетчик 3 импульсов, контур регулирования ЭДС двигателя, содержащий замкнутый аналоговый контур регулирования скорости; второй блок 12 регулирования и датчик28 потока, канал задания оптимальной скорости, содержащий блоки 16...27 и воздействующий на блок 5 ограничения частоты. Код заданного перемещения NL формируется с помощью блока 1, а код заданного времени перемещения NT и команда Пуск на начало перемещения формируются с помощью блока 15.
Блок 23 фиксации параметров токовой диаграммы представляет собой элемент программируемой памяти, содержащий де0
5
0
5
0
5
0
5
0
5
шифраторы 29.1 и 29.2 и ячейки памяти, сгруппированные в 30.1...30.П страниц. При помощи дешифратора 29.1 по коду NL заданного перемещения определяется номер страницы, а с помощью дешифратора 29.2 по коду NT заданного времени перемещения определяется номер 1...т ячейки в данной странице. Содержимое каждой ячейки памяти представляет собой совокупность параметров токовой диаграммы двигателя:
Nho- код максимального значения тока двигателя в начальный момент времени отработки заданного перемещения;
NKi, N«2 - коды значений производной тока двигателя в первой и второй зонах регулирования скорости. При этом величины п и m представляют собой диапазон возможных значений кодов соответственном, и NT с учетом принятых дискретностей их представления.
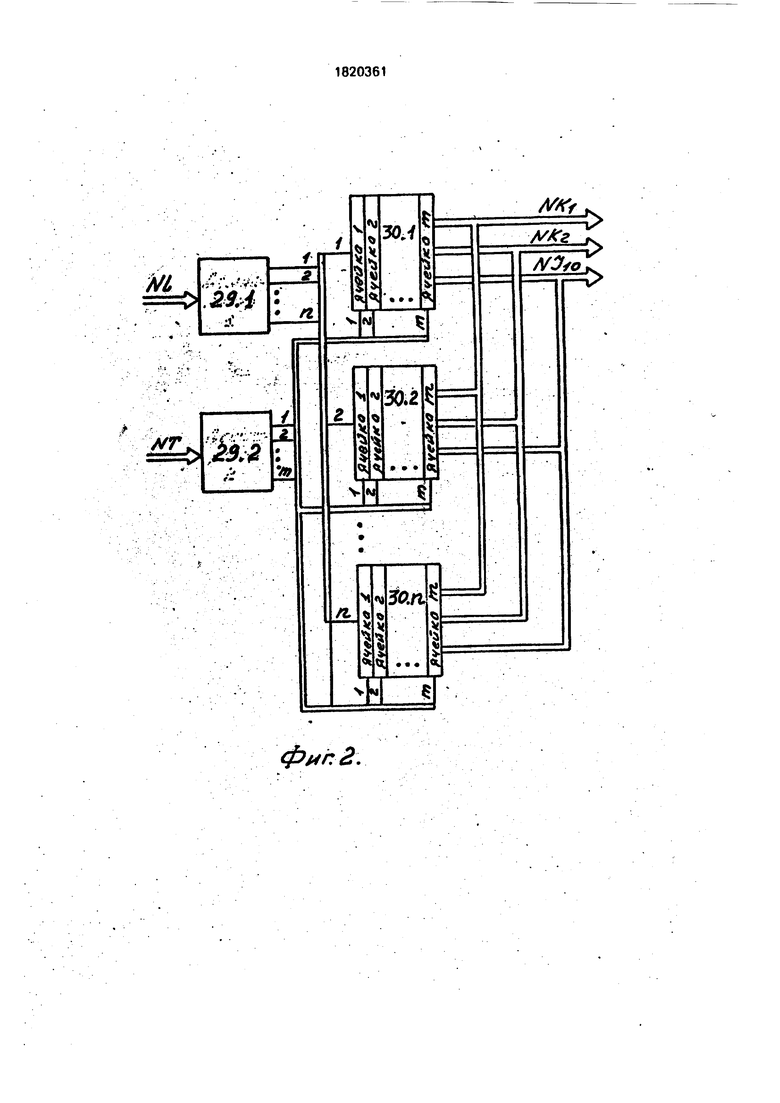
Как и в прототипе, в данной системе реализуется оптимальный, соответствующий минимуму суммарных тепловых потерь в электроприводе закон изменения скорости двигателя. Причем для повышения быстродействия при отработке средних и больших перемещений осуществляется двухзонное управление электроприводом с минимизацией суммарных тепловых потерь в обеих зонах регулирования скорости: до номинальной скорости путем регулирования напряжения, подаваемого на двигатель, а выше номинальной скорости путем регулирования магнитного потока двигателя. Каждому заданному перемещению L (его код NL) за заданное время Т (его к од NT) соответствует единственная, оптимальная по сумме потерь в обеих зонах тахограмма. В соответствии с этой тахограммой электропривод осуществляет два равных перемещения U за время Ti (при разгоне и торможении) в первой зоне и перемещение за время Т2 во второй зоне (см. фиг. 3).
Система позиционирования электропривода с энергетической оптимизацией при двухзрнном регулировании скорости работает следующим образом,
В исходном состоянии счетчики 3 и 21 импульсов и первый интегратор 7 находятся в нулевом состоянии. Сигнал тока возбуждения 1ь на выходе второго блока 12 регулирования соответствует номинальному потоку двигателя, сигнал Ь з задания скорости на выходе первого блока 9 ограничения амплитуды равен нулю и двигатель 13 электропривода находится в состоянии покоя .
Из блока 1 задания перемещения код NL заданного положения подается на первый вход сумматора 2. На выходе сумматора 2 возникает код рассогласования ANL, который подается на вход первого преобразователя 4 код-частота. На выходе преобразователя 4, имеющего линейную характеристику, возникают импульсы, следующие с частотой fa, величина которой пропорциональна коду рассогласования ДМ1. Импульсы частоты fa поступают на первый вход блока 5 ограничения частоты. На выходе блока 5 возникают импульсы, частота f4 следования которых равна частоте forp импульсов, поступающих на его второй вход с выхода второго преобразователя 27 код-частота. Вырабатываемые блоком 5 импульсы суммируются в первом интеграторе 7, выходная величина NV которого преобразуется цифроаналого- вым преобразователем 8 в напряжение Us задания скорости, которое через первый блок 9 ограничения амплитуды подается на первый вход первого блока 11 регулирования, управляющего напряжением двигателя 13. При этом двигатель начинает разгоняться, импульсный датчик 14 перемещения начинает выдавать импульсы, частота тд следования которых пропорциональна скорости перемещения рабочего органа электропри- вода. Эти импульсы через формирователь 6 импульсов подаются на второй вход первого интегратора 7 и являются сигналом обрат- ной связи в цифровом контуре регулирования скорости. С выхода формирователя 6 импуль- сы подаются также на вход первого счетчика 3 импульсов, производящего их суммирова- ние. На выходе счетчика 3 код М(ф представляет собой фактическое положение рабочего органа электропривода и является сигналом обратной связи в цифровом контуре регулирования положения.
В процессе отработки заданного перемещения разгон и торможение двигателя 13 осуществляются в соответствии с величи- ной сигнала forp заданной скорости, отраба- тываемого в первой зоне по каналу управления напряжением двигателя, а во второй зоне по каналу управления полем двигателя цифровым контуром регулирова- ния скорости. При этом суммарное число импульсов частоты forp за цикл позиционирования в точности соответствует коду NL заданного перемещения.
Частота forp является выходным сигна- лом канала задания оптимальной скорости и формируется следующим образом. В исходном состоянии второй счетчик 21 импульсов удерживается в нулевом состоянии и второй интегратор 25 также находится в нулевом состоянии. Нулевое значение кода NV3 задания скорости подаётся, на входы блока 22 сравнения кодов и второго преобразователя 27 код-частота. При этом на первом выходе блока 22 имеется единичный. а на втором - нулевой сигналы, которые подаются на управляющие входы соответственно первого 17 и второго 18 ключей. На выходе преобразователя 27 код-частота частотный сигнал forp задания оптимальной скорости равен нулю. Аналоговый сигнал ифн датчика 28 потока преобразователем 26 аналог-код преобразуется в код , соответствующий номинальному потоку двигателя, который подается на первый вход умножителя 24 кодов. С выходов блоков 1 и 15 коды NL и NT соответственно заданных величин перемещения и времени перемещения подаются на входы блока 23 фиксации параметров токовой диаграммы. На выходе блока 23 формируются код NMo максимального значения тока двигателя в начальный момент отработки перемещения, подаваемый на кодовый вход второго счетчика 21 импульсов, а также коды NKi и МКа производных динамического тока в первой и во второй зонах регулирования скорости, которые подаются на кодовые входы соответственно первого и второго преобразователей 19 и 20 частоты. По команде Пуск, соответствующей началу цикла отработки перемещения, подаваемой на установочный вход второго счетчика 21 импульсов: в него заносится код МНо и счетчик 21 импульсов переводится в режим вычитания поступающих на его счетные входы импульсов. С выхода генератора 16эталонной частоты через первый ключ 17 импульсы частоты fo поступают на частотный вход первого преобразователя 19 частоты, на выходе которого частота импульсов определяется выражением. .
fHo NKi .
0)
Эти импульсы поступают на первый частотный вход второго счетчика 21 импульсов, выходной код которого изменяется по линейному закону в соответствии с выражением
NI NHo-ftl Nlio-foNKi t.
(2)
где t - текущее время.
Код N1, пропорциональный заданному динамическому току двигателя, умножается умножителем 24 кодов на код МФн, в результате чего на его выходе формируется код NM, пропорциональный заданному динамическому моменту двигателя, в соответствии с выражением
NM-NI ЫФн.
(3)
С выхода умножителя 24 код NM подается на вход второго интегратора 25, на выходе которого формируется код NVs задаваемой оптимальной скорости в соответствии с выражением
J Ти
NV3 V- NM t.
(4)
примет нулевое значение, а на втором выходе - единичное, в результате чего первый ключ 17 закрывается, а второй ключ 18 открывается. С этого момента времени им- пульсы частоты fo с выхода генератора 16 поступают через ключ 18 на вход второго преобразователя 20 частоты, выходной-сигнал которого определяется выражением

| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система для позиционирования электропривода постоянного тока | 1987 |
|
SU1553955A1 |
| Система позиционирования с двухзонным регулированием скорости электропривода | 1991 |
|
SU1798765A1 |
| Цифровая система для позиционного регулирования | 1984 |
|
SU1198460A1 |
| Цифровая система для позиционногоРЕгулиРОВАНия | 1979 |
|
SU824147A1 |
| Цифровая система для позиционного регулирования | 1985 |
|
SU1280572A1 |
| Устройство управления безупорным мерным резом полосы | 1978 |
|
SU774832A1 |
| Цифровая система регулирования электропривода | 1980 |
|
SU930246A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Способ управления приводом летучих ножниц и устройство для его осуществления | 1990 |
|
SU1764865A1 |
| Система управления приводом летучих ножниц | 1984 |
|
SU1260121A1 |

которое с учетом выражений (2) и (3) сводит- 10 NK2. ся к виду
MV3 Nlio-N.t уМКгМФн ТиТи
t2, (5)
где Ти - постоянная времени интегрирования, пропорциональная моменту инерции привода.
Код NVa преобразуется преобразователем 27 код-частота в частотный сигнал forp, пропорциональный задаваемой оптимальной скорости:
forp Kf-NV3,
(6)
где Кг - коэффициент пропорциональности. Пренебрегая динамической ошибкой в скорости, можно записать
V
ОГР
du
(7)
где V - скорость перемещения рабочего органа привода;, °
dL принятая дискретность задания перемещения, т.е. цена импульса на выходе датчика 14 импульсов.
Из соотношения (7) с учетом выражений (6) и (5) можно получить следующее выражение для скорости:
forp
KrdL-Nlio-N Eh Ти
t КгсМо-МКгМФн з
---тйr
(8)
Выражение (8) показывает, что движение привода в первой зоне регулирования скорости осуществляется по отрезку оптимальной параболической тахограммы.
В момент времени , когда электропривод, разгоняясь в первой зоне, достигнет номинальной скорости, на выходе второго интегратора 25 код NVa становится равным коду NVH, соответствующему номинальной скорости. При этом на первом выходе блока 22 сравнения кодов сигнал
(9)
NK2.
Импульсы частоты f2 поступают на второй вход второго счетчика 2.1, в результате чего его выходной код изменяется по диней- ному закону в соответствии с выражением
NI Nh2-f2t Nll2-fO NK2° t,
(1.0)
где код счетчика 21 .зафиксированный 20 в момент времени Ti и равный в соответствии с выражением (2) величине
Nli2 Nlio-do NKrTi.
(11)
С учетом уравнения (11) выражение (10) принимает вид
NNNiio-fo NKi/Ti-fo NK t . (12)
Начиная с момент времени Тч, соответствующего началу второй зоны регулирования скорости, второй блок 12 регулирования на основе информации о величине магнитного потока двигателя и его скорости поддерживает постоянство ЭДС двигателя, снижая ток возбуждения и ослабляя магнитный поток обратно пропорционально скорости привода. В результате этого на выходе датчика 28 потока сигнал 11ф, а также код
ЫФ на выходе преобразователя 26 аналог- код изменяются обратно пропорционально скорости привода. При этом величина кода МФ определяется выражением
451Чф ЫФн
(13)
где ФЙ/N/H - номинальные, знамения потока
ДВИГатёЛЙ :И:СКОрОСТИ ПрИВОДа; 1 ;;м;;
Так как скорости привода во второй яо- Яе йШий йОминальной то нав одахгпервого блока 11 регулирования, управляющего напряжением двигателя, сигналы задания и обратной связи по скорости ограничены при помощи первого и второго блоков 9 и 10 ограничения амплитуд до уровня, соответствующего номинальной скорости.
Величина кода NM, пропорционального динамическому моменту, определяется выражением 1ЧФ, которое с учетом уравнений (11) и (12) имеет вид
(Nho-fo-NKi.Ti-fo«NK2.t),(14) а код задания скорости равен
NV3 /- NM(t),%Nlio- TIv
-fo NKi Ti)«t-fo NK2 у +C, (15)
где С - постоянная интегрирования, определяемая из начальных условий, соответствующих моменту времени TL20
В соответствии с выражениями (6) и (7) можно запиСать
V Krdi«NV3.
Учитывая соотношение (16), из выраже- ния (15) находим закон изменения скорости привода во второй зоне регулирования
V(Kf dL VH МФй(М1ю-То
t2 1 NKi Ti)t-f0-NK2 y).
4 Как и при регулировании скорости в первой зоне, цифровой контур регулирования положения при регулировании скорости во второй зоне также контролирует отработку заданного перемещения, так как при этом на входы первого интегратора 7 посту- пают задающий частотный сигнал forp и в качестве обратной связи частотный сигнал (fg фактической скорости рабочего органа электропривода во второй зоне регулирования скорости..
В момент времени t Ti+T2, когда электропривод, снижая скорость при регулировании во второй зоне, достигает номинальной скорости (см. рис. 3), выходной код NVa второго интегратора 25 достигает величины МУн и блок 22 сравнения кодов на выходах формирует сигналы, соответствующие обратному переходу от второй зоны к первой зоне регулирования скорости, а именно по сигналу с второго выхода второй ключ 18 закрывается, а по сигналу с первого выхода первый ключ 17 открывается. .
Работа системы на спадающем участке параболической тахограммы при регулиро
10
15
20
25
30
35 40 45
5055
вании скорости в первой зоне принципиально ничем не отличается от работы системы на восходящем участке этой тахограммы. Отличие заключается только в том. что при движении на спадающем участке параболической тахограммы начальное значение выходного кода второго счетчика 21 равно (см. фиг. 3).
В момент времени t 2Ti+T2, когда электропривод, двигаясь по спадающему участку параболической тахограммы в первой зоне регулирования скорости, достигнет нулевой скорости, выходной код NI второго счетчика 21 достигает величины -Nho, а выходной код второго интегратора 25 уменьшается до нулевого значения. При этом блок 22 сравнения кодов выходным сигналами блокирует действие канала формирования оптимальной по тепловым потерям двухзон- ной тахограммы электропривода.
В конце цикла отработки заданного перемещения при сигнал ограничения блокируется, а контроль отработки заданного перемещения осуществляется цифровым контуром регулирования положения. В этом случае при наличии ошибки в позиционировании, например, из-за инерционности контура регулирования .скорости или из-за Наличия статической нагрузки, на вход первого интегратора 7 через блок 5 ограниче: ния частоты поступают импульсы частоты fa. Код NV на выходе первого интегратора 7, а следовательно, и сигнал Уз на выходе первого блока 9 ограничения амплитуды изменяются таким образом, чтобы устранить рассогласование. По достижении величиной кода Ы1ф фактического положения рабочего органа электропривода значения NL кода заданного перемещения рассогласование становится равным нулю и рабочий орган электропривода останавливается в заданном положении.
Таким образом, в отличие от прототипа в предлагаемой системе для формирования оптимальной тахограммы скорости, обеспечивающей минимум суммарных тепловых потерь по обеим зонам регулирования скорости, используются только три (вместо семи в прототипе) заранее рассчитанных исходных параметра, а регулирование потока двигателя осуществляется простым традиционным способом путем поддержания постоянства ЭДС двигателя в соответствии с ее номинальным значением. Это дало возможность по сравнению с прототипом заменить блок фиксации параметров тахограмм на более простой (с уменьшенным более чем вдвое объемом памяти) блок фиксации параметров токовой диаграммы и, что более существенно, вообще устранить сложный
цифровой блок задания поля двигателя, имеющий трехмерную организацию программируемой памяти, что привело к существенному упрощению устройства и повышению его надежности. Поэтому поло- жительный эффект от применения изобретения создается за счет снижения стоимости оборудования и улучшения эксплуатационных характеристик системы.
Ф о р м у л а изобретения Система позиционирования электропривода с энергетической оптимизацией при двухзонном регулировании скорости, содержащая блок задания времени переме- щения, выход которого соединен с первым входом сумматора, выходом подключенного к входу первого преобразователя код-частота, выход которого соединен с первым входом блока ограничения частоты, выхо- дом подключенного к первому входу интегратора, выход которого соединен с входом цифроаналогового преобразователя, выход которого соединен с входом первого блока ограничения амплитуды, первый блок регу- лирования, двигатель, импульсный датчик перемещения, формирователь импульсов, выход которого соединен с вторым входом первого интегратора, первый счетчик импульсов, выход которого подключен к второ- му входу сумматора, выход первого блока ограничения амплитуды соединен с первым входом первого блока регулирования, последовательно соединенные генератор эталонной частоты, первый ключ, управляю- щий вход которого подсоединен к первому выходу блока сравнения кодов, первый преобразователь частоты и второй счетчик импульсов, а также второй блок.регулирования, выход которого подключён к второму входу двигателя, выход которого соединен с входом
второго блока ограничения амплитуды, выход которого подсоединен к второму входу первого блока регулирования, второй ключ и второй преобразователь частоты, о т л и ч а ю- щ а я с я тем, что, с целью повышения системы за счет ее упрощения, в нее введены блок фиксации параметров токовой диаграммы, первый и второй входы задания которого подключены соответственно к выходу блока задания перемещения и к первому выходу блока задания времени перемещения, последовательно соединенные умножи- дель кодов, второй интегратор и второй преобразователь код-частота, выход которого подсоединен к второму входу блока ограничения частоты, а также датчик потока, вход которого подсоединен к выходу второго блока регулирования, выход подключен к первому входу второго блока регулирования и к входу преобразователя аналог-код, выход которого соединен с первым входом ум- нсгжитёля кодов, второй вход которого подсоединен к выходу второго счетчика импульсов, установочный вход которого подключен к второму выходу блока задания времени перемещения, кодовый вход соединен с первым выходом блока фиксации параметров токовой диаграммы, а второй счетный вход подсоединен к выходу второго преобразователя частоты, частотный вход которого подключен к выходу генератора эталонной частоты через второй ключ, управляющий вход которого соединен с вторым выходом блока сравнения кодов, вход которого подсоединен к выходу второго интегратора, второй и третий выходы блока фиксации параметров токовой диаграммы подключены к кодовым входам соответственно первого и второго преобразователей частоты, а второй вход второго блока регулирования соединен с выходом двигателя.
fe
2/
N
i/
19COZ81
f ;/i. ij ио №.
to
0.5
r
W /tf 2.0 2,5 4,
: :
4,
-1.0
-Ьг1
-1,
- iio
4,
4,0 4,5 $.0
s s
П
| Цифровая система для позиционного регулирования | 1985 |
|
SU1280572A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Цифровая система для позиционирования электропривода постоянного тока | 1987 |
|
SU1553955A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
