(54) СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ОДНОКОВОЮВОГО
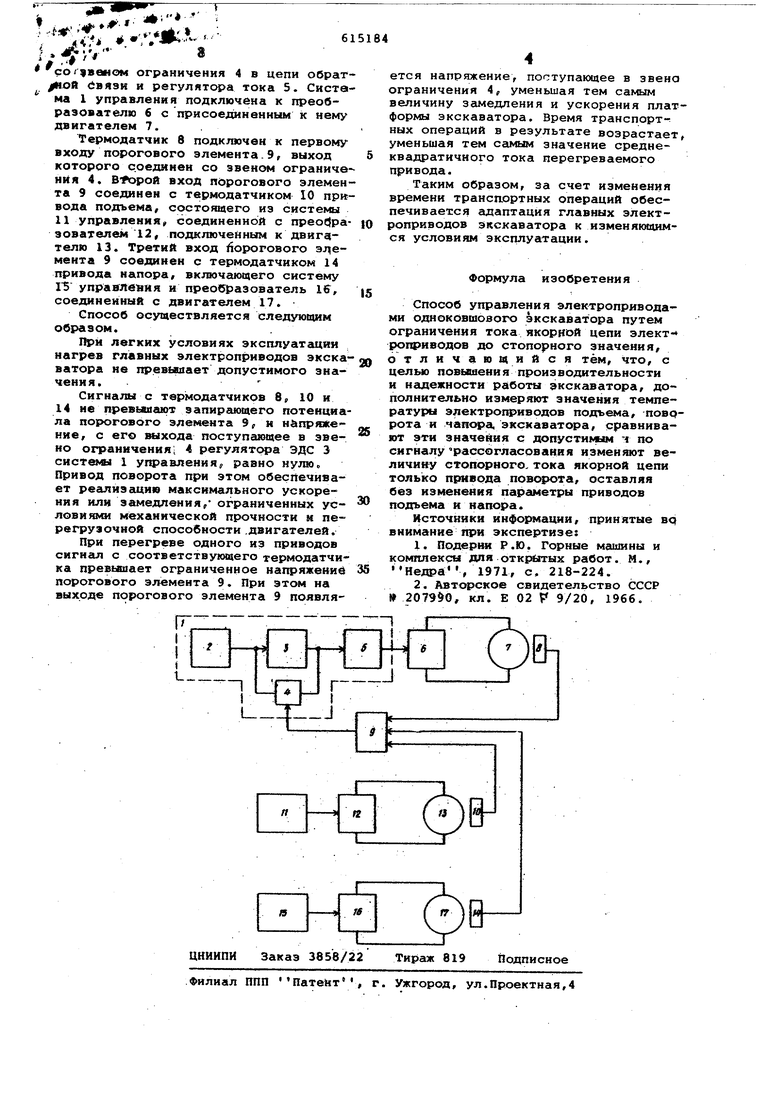
ЭКСКАВАТОРА 6 V, j(r. .- /, созвеном on рорваном ограничения 4 в цепи обрат jfKOti йвязи и регулятора тока 5. Систе ма 1 управления подключена к преобразователю б с присоединенным к нему двигателем 7. . ермодатчик 8 подключен к первому входу порогового элемента.9, выход которого с.оедииен со звеном ограниче ния 4. Второй вход порогового элемен та 9 соединен с термодатчиком 10 при вода подъема, состоящего из системы 11 управления, соединенной с преое|ра зователем 12, подключенным к двигателю 13. Третий вход йорогового э емента 9 соединен с термодатчиком 14 привода напора, включеиощего систему 15 управления и преобразователь 1&, соединенный с двигателем 17. Способ осуществляется следующим образом.. легких условиях эксплуатгщии нагрев главных электроприводов экска ватора не щ $вь111ает допустимого значения. Сигналы с тер;модатчиков 8, 10 и 14 не превышают запирающего потенциа ла порогового элемента 9, и напряжение, с его выхода поступающее в звено ограничения; 4 регулятора ЭДС 3 систеквл 1 управления; равно нулю привод поворота при этом обеспечивает реализгидию максимального ускорения или замедления, ограниченных условияоо механической прочности н перегрузочной способности.двигателей. При перегреве одного из приводов сигнал с соответствующего термодатчика превьшает ограниченное напряжение порогового элемента 9. При этом на выходе порогового элемента 9 появляется напряжение, поступающее в звено ограничения 4, уменьшая тем самым величину замедления и ускорения платформы экскаватора. Время транспортных операций в результате возрастает, уменьшая тем самым значение среднеквадратичного тока перегреваемого привода. Таким образом, за счет изменения времени транспортных операций обеспечивается адаптация главных электроприводов экскаватора к изменяющимся условиям эксплуатации. Формула изобретения Способ управления электроприводами одноковшового экскаватора путем ограничения тока якорной цепи элект- роприводов до стопорного значения, отличающийся тем, что, с целью повьшения производительности и надежности работы зкскгшатора, дополнительно измеряют значения температуры электроприводов подъема, -поворота и , экскаватора, сравнивают эти значения с допустиьрлм ч по сигналу рассогласования изменяют величину стопорного, тока якорной цепи только привода пов(фота, оставляя без изменения параметры приводов подъема и напора. Источники информации, принятые вс| внимание лри экспертизе: 1.Подерни Р.Ю. Горные машины и комплексы для открытых работ. М., Недаа, 1971, с. 218-224. 2.Авторское свидетельство СССР №207990, кл. Е 02 Р 9/20, 1966.
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления электроприводами одноковшового экскаватора | 1985 |
|
SU1294933A1 |
| Способ адаптивного управления электроприводами одноковшового экскаватора | 1986 |
|
SU1410257A1 |
| Устройство для управления копающим механизмом экскаватора | 1976 |
|
SU613037A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1420127A1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Устройство для управления копающими механизмами экскаватора | 1978 |
|
SU749996A1 |
| СИСТЕМА ЭЛЕКТРОПИТАНИЯ ГЛАВНЫХ ПРИВОДОВ ЭКСКАВАТОРА | 2010 |
|
RU2433520C1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
| СПОСОБ УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ПОВОРОТА КАРЬЕРНОГО ЭКСКАВАТОРА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2007 |
|
RU2347038C2 |
| Устройство для управления копающими механизмами экскаватора | 1981 |
|
SU1076549A2 |
