, Изобретение относится к управ- jjeHuro горной техникой, а именно к Управлению электроприводами главных NJiexaHHaMOB одноковшовых экскаваторов которых требуется ограничение токов, возникающих в режимах с управляющими и возмущающими воздействиями и может быть использовано для управления электроприводами других про- шленнык механизмов. ; Целью изобретения является повы- |пение надежности и производительности экскаватора путем снижения ди- |намических нагрузок, I На чертеже представлена схема Iустройства управления электроприво- дом одноковшового экскаватора.
Устройство включает систему 1 управления приводом, состоящую из последовательно соединенных командо- аппарата 2 и сумматора 3, к первому входу которого присоединен выход ко- мандоаппарата 2. Второй и третий входы сумматора 3 соединены соответственно с выходами звена 4 ограничения и регулятора 5, который состоит из трех интеграторов ,6-8 с усилителями 9-11 в цепи обратной связи. Причем первые выходы интеграторов 6-8 являются входами регулятора 5, а выход интегратора 6 является выходом регулятора 5. Выход интегратора 8 подключен к третьему входу интегратора 7, выход которого соединен с третьим входом интегратора 6. Система 1 управления подключена к электроприводу, состоящему из возбудителя 12 и генератора 13 с присоединенным к нему двигателем 14.
Выхода датчиков тока возбуждения 15, тока якорной цепи 16 и скорости двигателя 17 присоединены соответственно к входам вх.1, вх.2, вх.З, регулятора 5, который ограничивает ток стопорным значением и формирует оптимальный характер переходных процессов . Датчик 18 температуры окружающего воздуха подключен к входу порогового элемента 19, выход которого соединен с входом функционального преобразователя 20. Выход последнего и выход датчика 16 тока якорной цепи подключены к первому и второму входу звена 4 ограничения.
Устройство работает следующим образом.
При легких условиях эксплуатации и нормальной температуре окружающей
5
0
5
0
5
0
5
0
5
среды нагрев электропривода не превышает допустимого значения и напряжение на выходе функционапьного преобразователя 20 равно нулю. Сигнал с выхода датчика 17 скорости сум1- и- руется с сигналом усилителя 11 и поступает на вход интегратора 8. Проинтегрированный сигнал суммируется с сигналом датчика 16 тока якорной цепи и усилителя 10 и поступает на вход интегратора 7. С выхода интегратора 7 сигнал суммируется с сигналами датчика 15 тока возбуждения и усилителя 9 и подается на вход интегратора 6. с выхода интегратора 6 является выходным сигналом регулятора 5, который суммируется с задающим сигналом, приходящим с командоаппарата 2. Сигнал ошибки является управляющим сигналом, приходящим на вход возбудителя 12.
При понижении температуры окружающей среды сигнал с датчика 18 превышает ограничивающее напряжение порогового элемента 19 и на выходе последнего появляется напряжение, поступающее на вход функционального преобразователя 20, который вырабатывает напряжение в зависимости от значения .температуры по алгоритму снижения величины стопорного тока. С выходов функционального преобразователя 20 и датчика 16 тока якорной цепи сигналы поступают на входы звена 4 ограничения, которое определяет величину токовой отсечки. С выходов звена 4 ограничения и регулятора 5 сигналы поступают в сумматор 3, где суммируются с задающим сигналом, приходящим с командоаппарата 2. Выхрдной сигнал с сумматора 3 является управляющим сигналом, приходящим на вход возбудителя 12, управляющего генератором 13, от которого получает питешие якорная цепь двигателя 14, что приводит к изменению величины ускорения механизма, за счет чего уменьшаются динамические нагрузки и поломки металлоконструкций экскаватора.
Формула изобретения
Устройство управления электроприводом одноковшового экскаватора, включающее датчик температуры окружающего воздуха, соединенньй через
пороговый элемент и функциональный преобразователь с первым входом звена ограничения, а также командоап- парат и электропривод, отличающее с я тем, что, с целью повышения надежности и производительности экскаватора путем снижения динамических нагрузок, оно снабжено сумматором, датчиком тока возбуждения, датчиком тока якорной цепи,датчиком скорости двигателя и регулятором, включающим три интегратора и три усилителя, причем к первым входам первого, второго и третьего интеграторов подключены соответствен
но датчик тока возбуждения, датчик тока якорной цепи и датчик скорости двигателя, датчик тока якорной цепи подключен также к второму входу звена ограничения, в обратную связь каждого интегратора включен усилитель, интеграторы соединены между собой последовательно, выход коман- доаппарата соединен с первым входом сумматора, с вторым входом которого соединен выход звена ограничения, а выход первого интегратора подключен к третьему входу сумматора, выход которого подключен к электроприводу.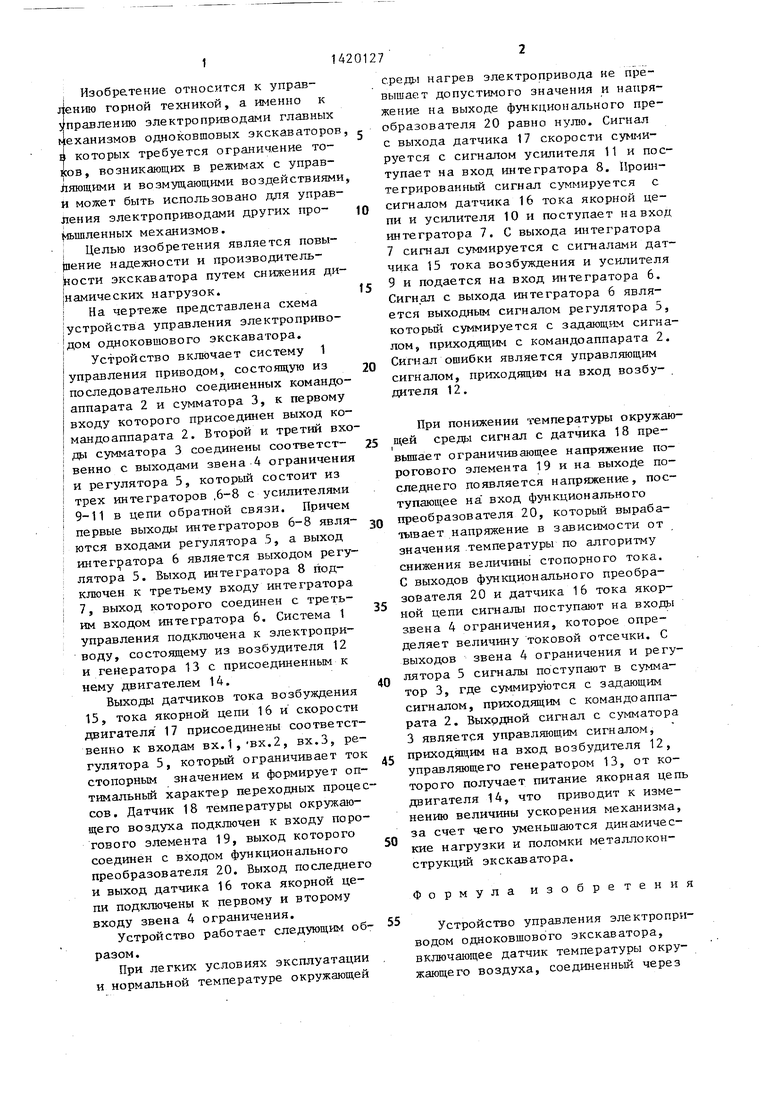
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для ограничения динамических нагрузок в экскаваторных механизмах | 1986 |
|
SU1416627A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1781392A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1742425A1 |
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
| Устройство управления электроприводами механизмов одноковшового экскаватора | 1989 |
|
SU1719561A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1382919A1 |
| СПОСОБ КОНТРОЛЯ И РЕГУЛИРОВАНИЯ ЗАГРУЗКИ ПРИВОДА ОДНОКОВШОВОГО ЭКСКАВАТОРА В ЭКСПЛУАТАЦИОННЫХ РЕЖИМАХ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2376422C1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДАМИ ЭКСКАВАТОРА | 2001 |
|
RU2193630C1 |
| Устройство управления электроприводом копающего механизма экскаватора | 1989 |
|
SU1656084A1 |
Изобретение относится к управлению горной техникой. Цель изобретения повьппение надежности произ- сти экскаватора путем снижения динамических нагрузок. Для этого устр-во снабжено сумматором (С) 3 и датчиками тока возбуждения 15, тока якорной цепи 16, скорости 17 двигателя, соединенными с регулятором 5. К входам . С 3 подключены выходы регулятора 5, командоаппарата 2 и звена 4 ограничения. К входам звена 4 подключены датчик 16 тока якорной цепи и через последовательно соединенные пороговый элемент 19 и функциональный преобразователь 20 датчик т-ры окружающего воздуха. Регулятор 5 состоит из трех интеграторов 6-8 с усилителями 9-11 в цепи обратной связи. При по-, нижении т-ры окружающей среды в С 3 сигналы с выходов звена 4 ограничения и регулятора 5 суммируются с сигналом с командоаппарата 2. Выходной сигнал с С 3 является управляющим для возбудителя 12, управляющего генератором 13, от которого получает питание якорная цепь двигателя 14. Это приводит к изменению величины ускорения механизма. При этом динамические нагрузки уменьшаются. 1 ил. Ф to
| Чилилин М.Г., Ключев В.И | |||
| и Сандлер А.С | |||
| Теория автоматизированного электропривода | |||
| М.: Энергия, 1979, с | |||
| ДВОЙНОЙ ГАЕЧНЫЙ КЛЮЧ | 1920 |
|
SU288A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1983 |
|
SU1090813A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
