а
Од
ю м
ласования фильтруется в фильтре 11 и усиленный усилителем 14 суммируется в ИИ 10 с сигналом ОС по скорости с датчика 17 и проинтегрированным сигналом ОС по МУВ и сигналом с выхода усилителя 13. На вход фильтра 12 поступает результируюпр1й сигнал с выхода фильтра 11. Его выходной сигнал является выходным сигналом регулятора 8 и поступает в сумматор 2. Здесь он
сравнивается с сигналом с командоап- парата 1. Сигнал рассогласования с выхода сумматора 2 является сигналом оптимального управляющего воздействия, поступающим через возбудитель 3 напряжения на обмотки возбуждения генератора 4 с подключенной к нему якорной цепью твигателя 5, соединенного через трансмиссию 6 с рабочим органом 7. 1 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО КОМБИНИРОВАННОГО ОПТИМАЛЬНОГО УПРАВЛЕНИЯ ЭЛЕКТРОПРИВОДОМ ЭКСКАВАТОРА | 1990 |
|
RU2030521C1 |
| Устройство управления электроприводом одноковшового экскаватора | 1986 |
|
SU1420127A1 |
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1781392A1 |
| Устройство комбинированного управления электроприводом поворота экскаватора | 1990 |
|
SU1810440A1 |
| Устройство управления электроприводами эскаватора | 1986 |
|
SU1432150A1 |
| Способ ограничения динамических нагрузок механизма поворота экскаватора и устройство для его реализации | 1990 |
|
SU1781393A1 |
| СПОСОБ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ ПАРАМЕТРАМИ ЭЛЕКТРОМЕХАНИЧЕСКОЙ СИСТЕМЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2010 |
|
RU2414048C1 |
| Устройство управления электроприводом одноковшового экскаватора | 1989 |
|
SU1742425A1 |
| Электропривод постоянного тока | 1983 |
|
SU1115188A1 |
| ЭЛЕКТРОПРИВОД | 2003 |
|
RU2254665C2 |
Изобретение относится к электроприводам горных машин и позволяет повысить надежность экскаватора путем снижения динамических нагрузок. Для этого устройство дополнительно содержит командоаппарат 1, датчик 15 тока возбуждения и регулятор 8. На входы регулятора 8 поступают сигналы с выходов датчиков тока возбуждения 15, скорости 17 двигателя 5, тока 16 якорной цепи и блока 18 определения нагрузки. Сигналы с датчиков 16 и 17 поступают также на вход блока 18. Ре- , гулятор 8 состоит из инвертирующих интеграторов (ИИ) 9, 10, фильтров М, 12и усилителей 13, 14. Сигнал обратной связи (ос) по моменту упругого взаимодействия (МУВ) с выхода блока 18 интегрируется в ИИ 9 и суммируется с сигналом ОС по скорости с датчика 17. Сигнал рассогласования интегрируется в ИИ 10 и усиленньй усилителем 13суммируется в ИИ 9 с сигналом ОС по МУВ. Проинтегрированный инверсный сигнал с выхода ИИ 10 суммируется с сигналом ОС по току якорной цепи с датчика 16. Полученный сигнал рассогI (Л с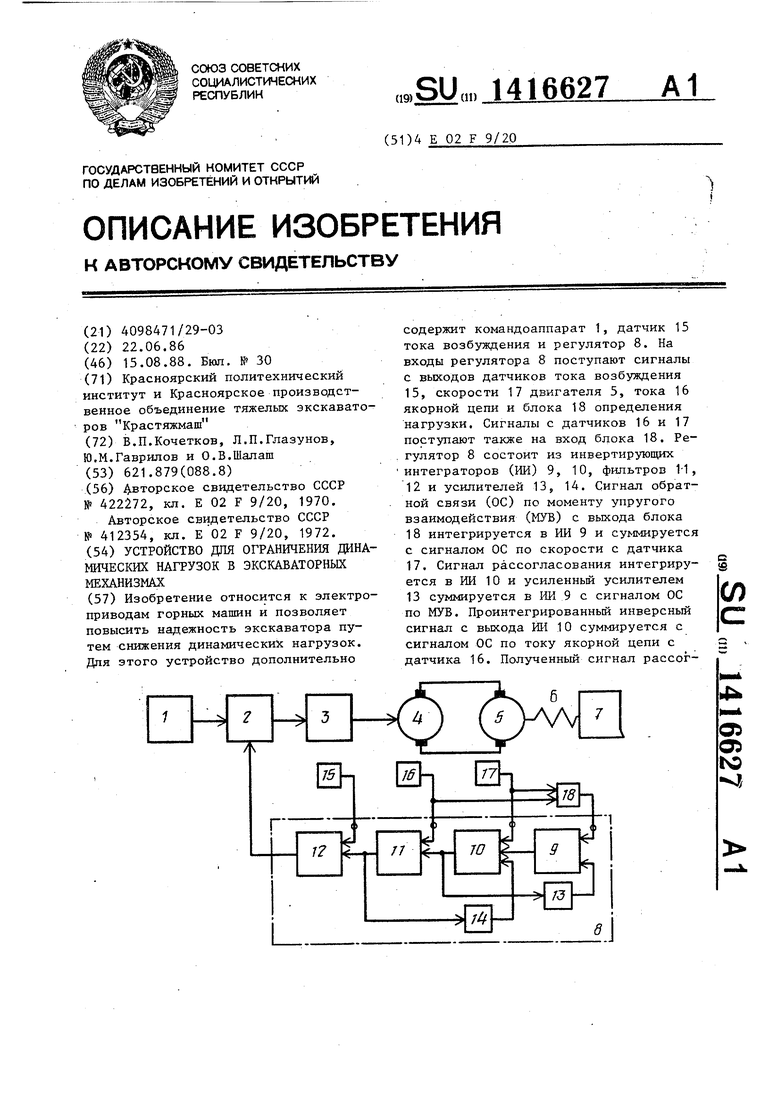
1
Изобретение относится к электроприводам горных машин и может быть применено для ограничения динамических нагрузок в копающих механизмах одноковшовых экскаваторов.
Целью изобретения является повышение надежности экскаватора путем снижения динамических нагрузок.
На чертеже представлена схема устройства для ограничения динамических нагрузок в экскаваторных механизмах.
Устройство включает последовательно соединенные камандоаппарат 1, сумматор 2, экскаваторный электропривод включающий возбудитель 3, напряжение которого подается на обмотки возбуждения генератора 4 с подключенной к нему якорной цепью двигателя 5, соединенного через трансмиссию 6 с рабочим органом 7. Второй вход сумматора 2 соединен с выходом регулятора 8, состоящего из двух интеграторов 9 и 10, двух фильтров 11 12, двух усилителей 13 и 14, причем первые входы интеграторов 9, 10 и фильтров 11, 12 являются входами регулятора 8, выход интегратора 9 подключен ко второму входу интегратора 10, выходом соединенного через усилитель 13 с вторым входом интегратора 9, выход интегра- тора 10 подключен ко второму входу фильтра 11, выходом соединенного через усилитель 14 с третьим входом интегратора 10, выход фильтра 11 подключен ко второму входу фильтра 12, выход которого является выходом регулятора 8. Входы вх, вх, BXj, вх регулятора 8 соединены соответственно с выходами датчиков тока возбуж
5
0
дения 15, тока якорной цепи 16, скорости двигателя 17 и блока определения нагрузки 18, первый и второй входы которого соединены соответственно с выходами датчиков скорости 17 и тока якорной цепи 1.
Устройство работает следующим образом..
Сигналы обратных связей по току возбуждения, току якорной цепи, скорости двигателя и моменту упругого взаимодействия с соответствующих датчиков и блока определения нагрузки поступают в регулятор 8, вырабатывающий оптимальное управляющее воздействие. Сигнал обратной связи по моменту упругого взаимодействия с выходом блока 18 определения величины нагрузки интегрируется в инвертирующем интеграторе 9. Проинтегрированный инверсный сигнал обратной связи по моменту упругого взаимодействия суммируется с сигналом обратной связи по скорости двигателя, приходя- ш:им с соответствующего датчика- 17. Сигнал рассогласования интегрируется в инвертирующем интеграторе 10. Проинтегрированный инверсный сигнал рассогласования с выхода инвертирующего интегратора 10 через усилитель 13 суммируется на входе инверсного интегратора 9 с сигналом обратной связи по моменту упругого взаимодействия. Кроме того, проинтегрированньй инверсный сигнал с выхода инверсного интегратора 10 суммируется с сигналом обратной связи по току якорной цепи с выхода соответствующего датчика 16. Сигнал рассогласования фильтруется
в инвертирующем фильтре 11. Инверсный сигнал рассогласования с выхода фильтра 11 через усилитель 14 суммируется с сигналом обратной связи по скорости двигателя сдатчика 17 и проинтегрированным инверсным сигналом рассогласования между сигналом обратной связи по моменту упругого взаимодействия и сигналом с выхода усилителя 13., Кроме того, инверсный сигнал рассогласования с выхода фильтра 11 суммируется с сигналом обратной связи по току возбуждения с соответствующего датчика 15. Результирующий сигнал поступает в фильтр 12 и на выходе получается сигнал оптимального управления, который суммируется в сумматоре 2 с задающим сигналом, поступающим, с командоаппарата 1. Сигнал рассогласования с выхода сумматора 2 является сигналом оптимального управляющего воздействия, приходящим на вход возбудителя 3, управляющего генератором 4, от которого получает питание якорная цепь двигателя 5, что приводит к изменению величины ускорения механизма, за счет чего уменьшаются динамические нагрузки и поломки металлоконструкций экскаватора. Формула изобретения
Устройство для ограничения дина- мических нагрузок в экскаваторных механизмах, содержащее экскаваторный электропривод, датчик тока якорной цепи и датчик скорости, соединенные с блоком определения нагрузки, а также сум1-1атор, отличающееся тем, что, с целью повышения надежности за счет ограничения динамических нагрузок, оно дополнительно содержит
Q комалдоаппарат, датчик тока возбуждения и регулятор, состоящий из двух фильтров, двух интеграторов и двух усилителей, причем блок определения нагрузки и датчик скорости подключе5 ны соответственно к первым входам первого и второго интеграторов, датчик тока якорной цепи и датчик тока возбуждения подключены, соответственно к первым входам первого и вто0 рого фильтров, выход первого интегратора соединен с вторым входом второго интегратора, выход которого соединен с вторым входом первого фильтра и через первый усилитель - с вторым
5 входом первого интегратора, выход первого фильтра подключен к второму входу второго фильтра и через второй усилитель - к третьему входу второго интегратора, а выход второго фильтра
0 подключен к второму входу сумматора, к первому входу которого подключен командоаппарат, выход сумматора соединен с экскаваторньм электроприводом.
| Двторское свидетельство СССР № 422272, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| УСТРОЙСТВО ДЛЯ ОГРАНИЧЕНИЯ ДИНАМИЧЕСКИХ НАГРУЗОК В ЭКСКАВАТОРНЫХ МЕХАНИЗМАХ | 1972 |
|
SU412354A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
