-
Изобретение относится к области автоматического управления и может быть использовано для программного управления промьпиленными роботами.
Цель изобретения - повышение точности и расширение области применения устройства за счет возможности управления приводом, работающим в относительной системе координат.
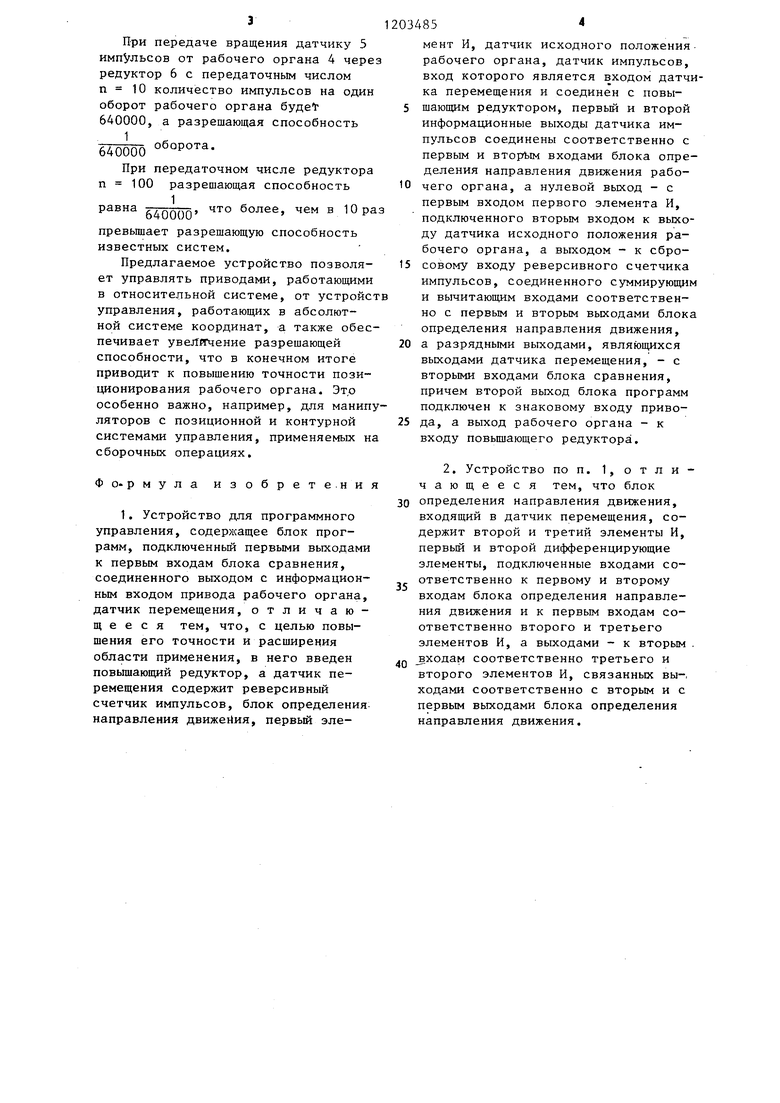
На фиг. 1 дана функциональная схема устройства , на фиг, 2 - временная диаграмма функционирования блока определения направления движения.
Устройство содержит блок 1 программ, блок 2 сравнения, привод 3, рабочий орган 4, датчик 5 импульсов повышающий редуктор 6, датчик 7 перемещения, содержащий реверсивный счетчик 8 импульсов, первый элемент И 9, датчик 10 исходного положения рабочего органа, блок 11 определени направления движения.
Блок 11 определения направления движения содержит третий элемент И 12, первый и второй дифференцирующие элементы 13 и 14, второй элемент И 15.
Устройство работает следующим
образом.
1
Перед началом обработки программ необходимо установить нули во всех разрядах счетчика 8 импульсов. Сигнал с блока 1 программ поступает на блок управления приводом 3 рабочего органа, которьм задает направление движения рабочему органу к исходному положению, определяемому совпадением сигналов с датчика 10 исходного положения рабочег органа и импульса (нуль-метки) датчика 5 импульсов. При совпадении этих сигналов с выхода элемента И 9 на реверсивньм счетчик 8 поступает сигнал сброса, с приходом которого во всех разрядах счетчика устанавливаются нули.
Для сохранения в пространстве исходного положения рабочего органа при наличии на датчике 5 импульсов одной нуль-метки на его один оборот, срабатывание и отпускание датчика 10 должны укладываться в один оборот датчика 5 импульсов, а при наличии двух нуль-меток - в 1/2 оборота датчика 5.
Дальнейшее движение рабочего органа в этом направлении прекраща03485
ется. С этого момента система программного управления начинает работать в абсолютной -системе координат,
5 При движении рабочего органа в том или ином направлении на выходах датчика 5 импульсов формируются две серии прямоугольных (А, В) импульсов, сдвинутые одна относительно
О другой на 90 . Эти импульсы (А, В) поступают на вход блока 11 определения направления движения рабочего органа.
Работа блока 11 определения нап15 равления движения рабочего органа поясняется временной диаграммой (фиг. 2). На дифференцирующих элементах 13 и 14 производится .дифференцирование по передним фронтам
20 импульсов А и В. На блок 11 поступают сигналы Аи йВ, на элемент И 12 - сигналы В и дА. При движении рабочего органа 4 в направлении - на выходе блока 11 форми25 руется сигнал В- ЬА, поступающий
на вход вычитания (двоичного) реверсивного счетчика 8j при движении в направлении + на выходе блока 11 формируется сигнал А л В, поступаю30 щий на вход сложения реверсивного счетчика 8. Момент останова и изменения направления вращения рабочего органа 4. и датчика 5 импульсов обозначен Т.
25 Таким образом, информация в виде двоичных чисел в каждый момент времени отображает положение рабочего органа 4 и поступает на блок 2 сравнения.
40 Двоичный параллельный код счетчика 8 импульсов поступает на блок 2 сравнения, где сравнивается с поступившим из блока 1 программ кодом очередной позиции рабочего органа 4.
45
При совпадении кода позиции,
поступившего из блока 1 программ в блок 2 сравнения, с кодом, поступившим из реверсивного счетчика 8, вырабатывается сигнал, который че50
рез привод 3 рабочего органа прекращает движение рабочего органа 4.
Унитарный код датчика 5 импульсов, поступаюпщй на вход реверсивного 55 двоичного счетчика, преобразуется в последнем в двоичный код, параллельно поразрядно передается в срав- нивакиций блок.
3
При передаче вращения датчику 5 импульсов от рабочего органа 4 чере редуктор 6 с передаточным числом п 10 количество импульсов на один оборот рабочего органа будеТ 640000, а разрешающая способность
оборота.
При передаточном числе редуктора п 100 разрешающая способность
равна ттпп7Т(| что более, чем в 10 ра
превышает разрешающую способность известных систем.
Предлагаемое устройство позволяет управлять приводами, работающими в относительной системе, от устройс управления, работающих в абсолютной системе координат, а также обеспечивает увеЛРГчение разрешающей способности, что в конечном итоге приводит к повышению точности позиционирования рабочего органа. Это особенно важно, например, для манипляторов с позиционной и контурной системами управления, применяемых н сборочных операциях.
Фо-рмула изобрете.ни
1. Устройство для программного управления, содержащее блок программ, подключенный первыми выходами к первым входам блока сравнения, соединенного выходом с информационным входом привода рабочего органа, датчик перемещения, отличающееся тем, что, с целью повышения его точности и расширения области применения, в него введен повышающий редуктор, а датчик перемещения содержит реверсивный счетчик импульсов, блок определения- направления движения, первый эле03485
мент И, датчик исходного положения- рабочего органа, датчик импульсов, вход которого является входом датчика перемещения и соединен с повы5 тающим редуктором, первый и второй информационные выходы датчика импульсов соединены соответственно с первьш и BTOpbiM входами блока определения направления движения рабо10 чего органа, а нулевой выход - с первым входом первого элемента И, подключенного вторым входом к выходу датчика исходного положения рабочего органа, а выходом - к сбро15 совому входу реверсивного счетчика импульсов, соединенного суммирующим и вычитающим входами соответственно с первым и вторым выходами блока определения направления движения,
20 а разрядными выходами, являющихся выходами датчика перемещения, - с вторыми входами блока сравнения, причем второй выход блока программ подключен к знаковому входу приво25 да, а выход рабочего органа - к входу повышающего редуктора.
2. Устройство по п. 1, отличающееся тем, что блок 30 определения направления движения, входящий в датчик перемещения, содержит второй и третий элементы И, первый и второй дифференцирующие элементы, подключенные входами соответственно к первому и второму входам блока определения направления движения и к первым входам соответственно второго и третьего элементов И, а выходами - к вторым . уходам соответственно третьего и второго элементов И, связанных вы-, ходами соответственно с вторым и с первым выходами блока определения направления движения.
35
40
II I fl .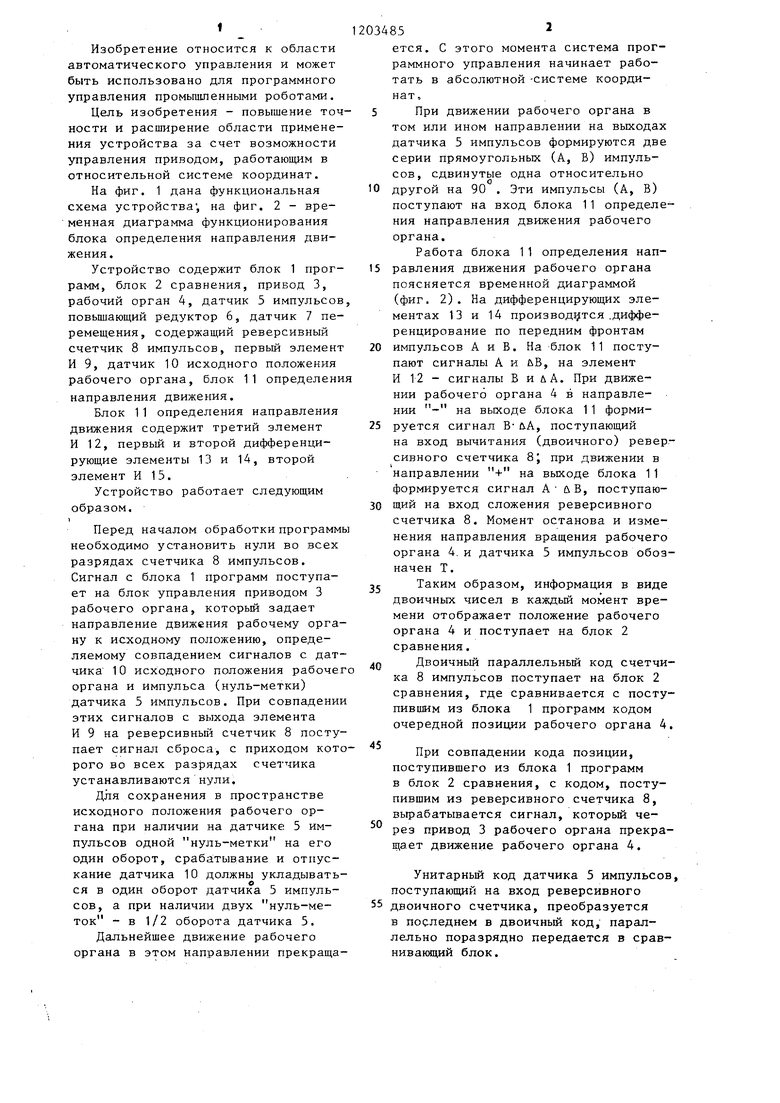
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровая система программного управления | 1979 |
|
SU883868A1 |
| Число-импульсный следящий электропривод | 1983 |
|
SU1124256A1 |
| Устройство цифровой индикации положения сосуда шахтной подъемной машины | 1987 |
|
SU1474061A1 |
| Система контурного управления промышленного робота | 1986 |
|
SU1430256A1 |
| Устройство для формирования управляющих программ | 1985 |
|
SU1257616A1 |
| СИСТЕМА ПРОГРАММНОГО УПРАВЛЕНИЯ СБОРОЧНЫМ УСТРОЙСТВОМ | 1991 |
|
RU2029335C1 |
| Электрогидравлический следящий привод | 1987 |
|
SU1462234A1 |
| Система числового программногоупРАВлЕНия "TPACCA-Кп | 1979 |
|
SU813371A1 |
| Измерительный схват промышленного робота | 1984 |
|
SU1278204A1 |
| СИСТЕМА ПОЗИЦИОННОГО ПРОГРАММНОГО УПРАВЛЕНИЯ МЕТАЛЛОРЕЖУЩИМИ СТАНКАМИ | 1970 |
|
SU269246A1 |
Изобретение относится к автоматическому управлению и может быть использовано для программного управления промьшшенными роботами. Изобретение содержит блок программ, блок сравнения, привод, рабочий орган, датчик импульсов, повьпиающий редуктор, датчик перемещения, содержащий блок определения направления движения, реверсивный счетчик импульсов, элемент И, датчик исходного положения рабочего органа. Введение повьшающего редуктора и выполнение датчика перемещения, включающего блок определения направления движения, реверсивный счетчик импульсов, элемент И и датчик исходного положения рабочего органа, позволяют повысить точность позиционирования рабочего органа и расширить область его применения за счет возможности управления приводом, работающим в относительной системе координат. 1 з.п. ф-лы, 2 ил. i М С с с; 00 4 00 ел
Составитель Н.Горбунова Редактор А.Шишкина Техред И.Асталош Корректор И.Муска
.,,„.„«.,м«в.-- - -- - - «--п-в-в (
Заказ 8415/50 Тираж 862Подписное
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35,, Раушская наб., д. 4/5
Филиал ППП Патент S г. Ужгород, ул. Проектная, 4
| Пособие по применению промышленных роботов | |||
| Сборник под ред | |||
| Капухико Кода | |||
| М., 1975, с | |||
| Приспособление для съемки жилетно-карманным фотографическим аппаратом со штатива | 1921 |
|
SU310A1 |
| Позиционная система программного управления | 1971 |
|
SU446034A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
