О)
со
4
00
1U
Изобретение относится к технике автоматического регулирования дискрет ного действия, а именно-к автоматическим дозировочным комплексам и может быть использовано для регулирования процессов порционного дозирования на предприятиях пищевой и химической промьппленности.
Цель изобретения - повышение точности дозирования за счет более точной оценки среднего значения массы дозы в выборке от номинальной.
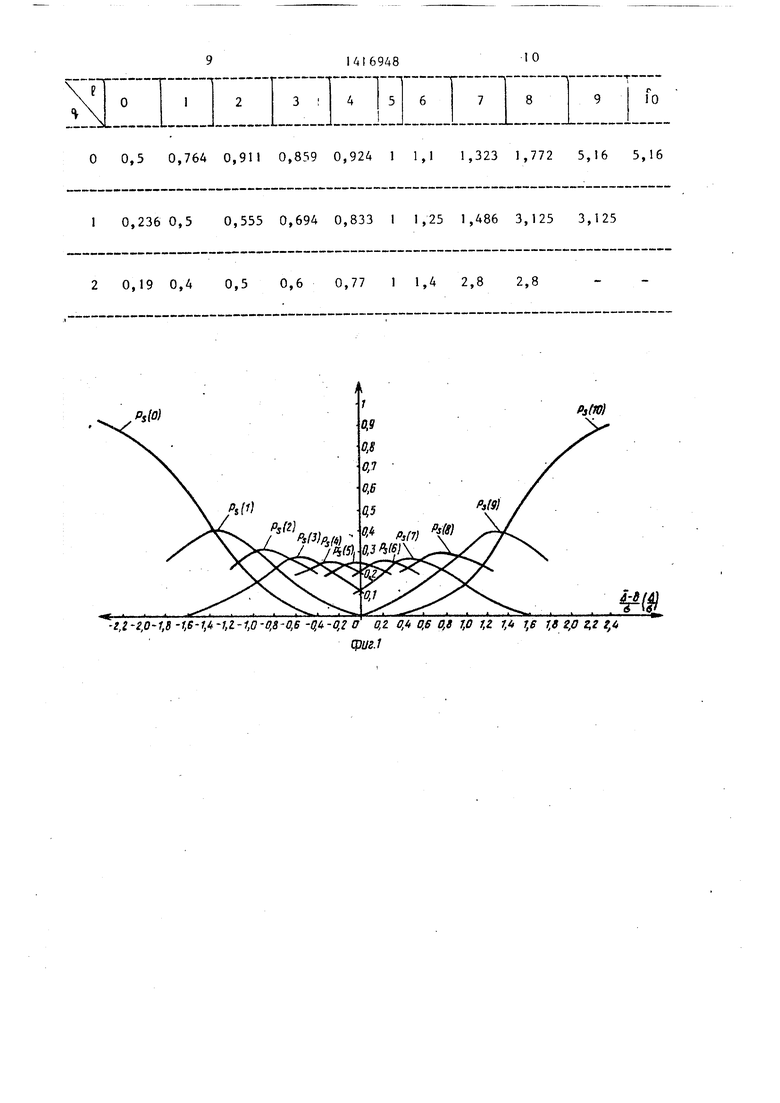
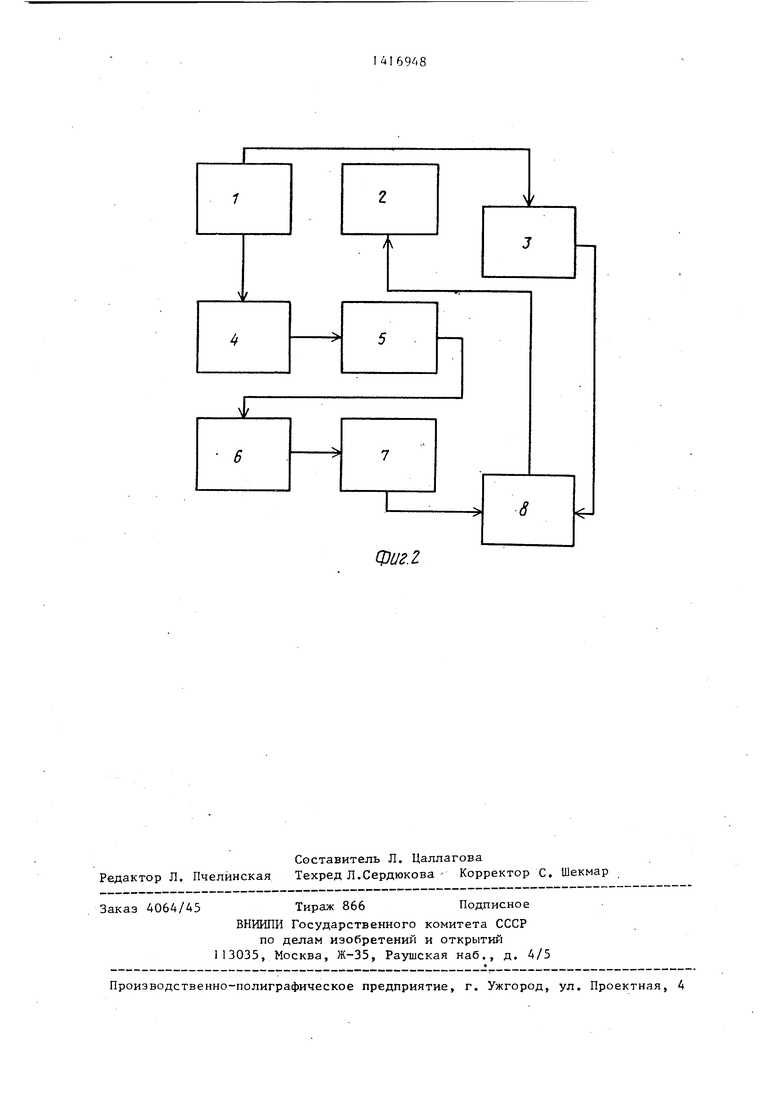
На фиг, 1 приведены графические зависимости, поясняющие предлагаемый способ; на фиг, 2 - вариант устройства, реализующего способ.
Устройство содержит дозатор I, исполнительный механизм 2, датчик 3 значения текущего объема, преобразователь А масса - напряжение, блок 5 пороговых элементов, блок 6 анализа выборки, блок 7 выбора значений корректирующего коэффициента F и блок 8 (1юрмирования управляющих сигналов.
Способ регулирования порционного дозирования сьтучих продуктов осуществляют следующим образом,
В каждом цикле дозирования сравнивают массу каждой дозы с номинальным значением, например, величину линейного перемещения подвижной части весов преобразуют при помощи соответствующих датчиков в электрический сигнал.
Амплитуда сигнала имеет минимальное значение при определенном положении подвижной рамы весов. Это положение устанавливают так, чтобы оно соответствовало номинальной массе дозы. При отклонении от указанного положения рамы весов амплитуда сигнала увеличивается пропорционально величине линейного перемещения, а фаза сигнала меняется на 180° при изменении направления отклонения относительно положения, соответствующего номинальной массе, В результате проведенного сравнения определяют число i отклонений в положитель,ную сторону (число перевесов) и число k отклонений в отрицательную сторону (число недовесов от номинального значения в выборке из заданного числа п последовательны доз (i + k п),
Измеряют текущий объем доз в данной выборке и одновременно с указанными операциями сравнивают отклонение массы каждой дозы от номинально82
го значения с верхней dV и нижней f- браковочными границами ( t в этой же выборке и определяют число доз j , вьщ1едтих за верхнюю (положительную) , и j , В1 Ш1едших за нижнюю (отрицательную) браковочные границы.
Затем сравнивают число, положительных i и число отрицательных k отклонений массы дозы от номинального значения с заранее заданным пороговым значением ( ( п/2). Величину выбирают из требуемого соотношения между вероятностью правильного обнаружения среднего значения отклонения массы дозы в выборке из заданного числа последовательных доз и вероятностью принятия ошибочного рещения о посто янном смещении в процессе порционного дозирования,
В результате этого сравнения определяют знак корректирующего коэффициента F, соответствующего наиболее вероятному отклонению средней массы
дозы в выборке от номинального значения. При i |U знак F полагают отрицательным, при k чС цх - положительным. По значениям i, k, j., j-2 с учетом проведенных сравнений из заранее
заданной совокупности чисел выбирают абсолютное значение корректирующего коэффициента F,
В этой совокупности чисел для каждого сочетания целых неотрицательных
чисел qnl (, q + ) содержится положительное число. Абсолютное значение F полагают равным этому числу для q i, 1 j при i (U , либо для q k, 1 j при k : jU . При
i f Hk7/u присваивают корректирующему коэффициенту F значение,равное нулю.
Зная значения всех указанных вып:е параметров, определяют необходимую
величину dV изменения объема доз в последующей выборке из соотношения:
dV
V F
М„/ (/-f Г
(1)
где V - текущее значение объема дозы;
Mj. - номинальная масса дозы; - заданная браковочная граница F - корректирующий коэффициент.
Предлагаемый способ управления процессом порционного дозирования сы3141
пучих материалов основан на следуюшю вероятностных предпосьтках.
Последовательность измеряемых масс доз является дискретным случайным процессом, который можно представить как аддитивную смесь двух процессов - процесса с сильно коррелированными последовательными значениями доз и процесса с некоррелированными для разных моментов времени значениями.
Первый процесс является результатом флюктуации некоторого усредненного показателя, например средней плотности фасуемого продукта в бункере. Случайные изменения этого показателя обусловлены изменением физико-химичес ких свойств продукта.
Второй процесс обусловлен хаотичес кими флюктуациями значения показателя конкретной дозы относительно среднего значения, например, средней плот мости продукта в бункере. Указанный процесс в силу целого ряда сравнитель но одинаково действующих факторов мож но считать нормальным.
Исключить погрешности дозирования, обусловленные вторым процессом в рамках заданной технологической схемы не представляется возможным.
В этой связи целью управления является по возможности точный учет действия первого процесса. Для этого взвешиваемые порции разбиваются на группы из п последовательных доз. При этом отклонения масс доз в каждой отдельно взятой группе из п последовательных доз колеблются вокруг некоторого среднего значения. Значение объема выборки п не должно быть слишком малым, чтобы проявлялись статистические закономерности, и не слишком большим ,чтобы предположение о постоянстве среднего значения веса дозы Я и разброса (дисперсии) (у относительно этого среднего можно было считать справедливым. Величина Л оценивается исходя из метода максимума правдоподобия при условии, что распределение масс (или, что то же, отклонений) считается нормальным со средним значением Л и дисперсией 6. Тогда вероятность того, что отклонение текущего значения дозы больше номинального значения, задается выражением:
00
-
1
(Д- Я ) 2 Ь
dd
69Д8
(|)
(2)
2.
где ф(х) Efp (- у-) /t - i
теграл вероятности.
Вероятность того, что текущее значение отклонения от номинального превышает браковочные границы, определяется из выражения:
15
Р L - 6V2f
5«,
1 Г , /Я-сГ п , (---)J
(3)
0
25
30
Смещение в противоположную сторону влечет только соответствующее изменение в формулах (2) и (3) пределов интегрирования. Учитывая сущность процесса дозирования, используют схему последовательных независимых испытга- ний, которая позволяет записать вероятность того, что за п последовательных взвешиваний имеется точно m значений отклонений от номинала массы одного знака, например положительного, и вероятность Р(т) - ровно m выходов за браковочную границу:
pjCm) с;;. ;.( - р.,), (4)
где используется формула (2), а при формула (3).
Если учесть, что в заданной выборке п имеется ровно i отклонений от номинального значения одного (например, положительного), и j выходов (отклонений) за установленную браковочную границу tf , то из формул (2) - (4) при значениях s О, 1 А можно найти оценки дисперсии § н Л среднего значения отклонения от номинального значения, для которых вероятности Р(т) достигают наибольшего значения при данных m 1 и m j .
Зависимости PQ(m) как функции z J/&, совпадающие с зависимостями Р , (т) как функциями у (Л-(Г)/6, приведены на фиг. 1.
Из приведенных графиков видно, что при фиксированных i и j можно определить параметры
U
(5) (6)
для которых достигают максимума вероятности P(i) и Pf(j) соответственно,
и с учетом этого можно определить 4
1 и с , которые выбирают в качестве
оценок 6 и 6 . Если наибольшие значения указанных вероятностей не дости
гаются (например, при m 10), то
} 1
оценки и 6 определяются из интервальных соображений. Из изложенных выше предположений о характере процесса дозирования вытекает соотношение
9486
ности возможных абсолютных значений корректирующего коэффициента F.
В ходе регулирования процесса дозирования возможны следующие четыре принципиально различные ситуации, характеризующие заданную совокупность чисел для выбора необходимого значения коэффициента F.
0 I . /i О, j О. Тогда, находя F 5 / с из соотношений (5), (6) получают
Zn
Уо
(8)
cUi где Уд. c(r(j- fria;( 0,5 -фСу) + Ф(у) ; .
z« arg max 0,5 с1- 1 + + Ф(2)Ч1 -Ф(г) ,
2. |U7/i 7 п, j 0. Исходя из интервальных оценок получают
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования массы дозы | 1977 |
|
SU690453A1 |
| Устройство для автоматического регулирования массы дозы | 1987 |
|
SU1500999A1 |
| Способ управления процессом весового порционного дозирования сыпучих материалов | 1987 |
|
SU1493879A1 |
| Способ регулирования процесса порционного дозирования сыпучих материалов | 1986 |
|
SU1525685A1 |
| Способ управления процессом порционного дозирования сыпучего материала | 1985 |
|
SU1307242A1 |
| Способ управления процессом весового порционного дозирования сыпучих материалов | 1987 |
|
SU1500852A1 |
| РЕГУЛЯТОР ПРОЦЕССА ПОРЦИОННОГО ДОЗИРОВАНИЯ СЫПУЧИХ МАТЕРИАЛОВ | 1991 |
|
RU2065199C1 |
| ИЗМЕРЕНИЕ ВЛАЖНОГО ГАЗА | 2007 |
|
RU2453816C2 |
| Способ весового дозирования сыпучих материалов | 1989 |
|
SU1615566A2 |
| Весовой порционный дозатор | 1980 |
|
SU879316A1 |
Изобретение относится к технике автоматического регулирования и может быть использовано для регулирования процессов порционного дозирования на предприятиях пищевой и химической промышленности. Целью изобретения является повьшение точности дозирования. Для достижения цели определяют лютное значение и знак корректируннце- го коэффициента и определяют величину изменения объема доз в последующей V F М„/ сГ+ F выборке из соотношения uV где V - текущее значение объема доз; Mj - номинальная масса дозы; сГ - заданное значение верхней и нижней браковочных границ; F - корректирующий коэффициент. 1 з.п. ф-лы, 2 ил., 1 табл. В (Л
JV V
М„ + 2
(7)
означающее, что требуемое приращение объема дозы относится к текущему объему как среднее значение отклонения веса дозы от номинала к приращению номинального веса.
В результате такой коррекции объема дозы в тех же условиях приращение массы дозы приводят к номинальному значению М|. Если в (7) заменить на его оценку и ввести корректирующий коэффициент F равенством J F сГ; получают соотношение (I ).
Значения F могут быть выражены
через
с УГ
и вычислены заранее
при фиксированном п для возможных значений i и j, причем в силу симметрии вероятностных законов распределения достаточно рассмотреть отклонения лишь в одну сторону от номинального значения и выход за одну браковочную границу, так как другой случай вытекает из первого изменением знака. Введение порогового значения f необходимо, чтобы предотвратить раскачивание процесса регулирования, вызываемого ложным определением смещения отклонения среднего значения массы дозы, когда Kojm4ecTBo отклонений от номинального значения в положительную или отрицательную стороны от номинального значения отличаются друг от друга незначительно.
В соответствии с изложенным приведем правила для составления совокуп
F
Zft
(о)
(9)
где Zp «rsf 1о,5
н, - . , w-j-C(Ll + + ()(z)r.Cl - (z)- .
F 1 +
Уо
+ arg Р(о)
,(10)
где у, ,5- Сп И - |)(у) х
X 1 +Ф(у)
F 1/2 .(И)
Таким образом, заранее заданную совокупность значений коэффициента F при фиксированных п и определяют для всех возможных .сочетаний i, j и з ходе регулирования процесса дозирования выбирают из- запоминающего устройства в зависимости от сложившейся в процессе дозирования сыпучих материалов ситуации.
В качестве примера в табл. 1 приведены заранее определенные абсолютные значения коэ(})фициента F для п 10 и |w 3; для q 2 значения коэффициента F равны нулю.
Рассмотрим пример конкретной работы изложенного способа регулирования. -Пусть в выборке из 10 последовательных значений масс доз с помощью блока анализа выборки определены числа i 9 (число перевесов), k - 1 (число недовесов), j, 6 (число выходов отклонения массы дозы от номинала за верхнюю браковочную границу), j 2 О (число выходов отклонения дозы от номинала за нижнюю браковочную границу), |U 3. Сравнивая i и k с р , видно, что k, поэтому корректирующему коэффициенту F присваивается знак минус, фиксируя, что отклонение среднего веса дозы от номинального значения смещено в отрицательную сторону. Далее из таблицы выбирают число, соответствующее q kH 1 j, полагая абсолютное значение (Ff 1,25. Таким образом F -1,25. Подставляя полученное значение в формулу (1), получают
/JV
V . -1,25 М . - 1, 25 (
где М и величины постоянные для конкретного процесса дозирования;
V - измеренное текущее значение объема дозы. В результате формируется управляющий сигнал на уменьшение текущего значения объема доз в последующей выборке на величину (, вычисленную из (12) при заданных заранее М,. и с/.
Формула изобретения
что; с целью повьшюния точности дозирования, измеряют текущий объем доз в данной выборке, одновременно со сравнением массы каждой дозы с номинальным значением и определением числа положительных и числа отрицательных отклонений от номинального значения сравнивают отклонение массы каж- Q дои дозы от номинального значения с верхней и нижней браковочными границами в этой выборке, определяют для каждой границы количество выходов за
нее, затем сравнивают число положи- 15 тельных -и число отрицательных отклонений массы дозы от номинального значения с заданным пороговым значением, по результатам сравнения определяют знак корректирующего коэффици- 20 ента, абсолютным значением которого принимают наиболее в.ероятное среднее значение нормированной к среднеквад- ратическому значению случайной вели-, чины отклонения массы дозы, а величи- 25 Ну uV изменения объема доз в последующей Выборке определяют- из соотношения
av
V F
f
+ F
где V - текущее значение объема
доз; 35 номинальная масса дозы;
/ - заданное значение верхней и нилсней браковочных границ;
F - корректирующий коэффициент, 2, Способ по п. 1, отличающийся тем, что знак корректирующего коэффициента принимают отрицательным в случае, если число положительных отклонений массы дозы от номинального значения больше заданного порогового значения, и принимают положительным., если число отрицательных отклонений меньше заданного порогового значения. 50
О 0,5 0,764 0,911 0,859 0,924 1 1,1 1,323 1,772 5,16 5,16
1 0,2360,5 0,555 0,694 0,833 1 1,25 1,486 3,125 3,125
2 0,19 0,4 0,5 0,6 0,77 1 1,4 2,8 2,1
-г,,о-1,ь-1,б-ц-1,1-1,о-о,80,Б-o,,г О а,г а, о,б о,г i,o и « I,B г,8 2,0 г,г г,
cpi/g.J
РзМ
фиг. 2
| Роткоп Л | |||
| Л | |||
| Статистические методы исследований на электронных моделях | |||
| - М.: Энергия, 1967, с | |||
| ПЕЧНОЙ ЖЕЛЕЗНЫЙ РУКАВ (ТРУБА) | 1920 |
|
SU199A1 |
| Устройство для автоматического регулирования | 1974 |
|
SU507778A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
