00
ел ю
; Изобретение относится к машинострое- , в частности к гидроприводам испол- н|ительных механизмов, и может быть ис- фльзовано, например, в станкостроении для останова и фиксации исполнительного ме- Х анизма в заданной координате.
Цель изобретения - повышение точности г озиционирования, надежности и быстродействия привода путем предварительного тррможения.
рез гидрораспределитель 10, отжимая пружину 8 и отключая тормоз 7. Выходное звено 4 гидродвигателя 3 и крановый гидрораспределитель 5 вращаются в требуемом направлении. При подходе к заданной координате менее, чем за один оборот звена 4 до останова, осуществляется отключение электрического сигнала от гидрораспределителя 16, который, переключаясь, сообщает дополнительную гидролинию 21 с
На чертеже представлена принципиаль-10 напорной гидролинией 1. Вследствие этого
йая гидравлическая схема привода.возрастает давление в полости 19 клапана 20,
I Гидравлический позиционный привод со-который перекрывает сливную гидролинию 2.
д ержит напорную 1 и сливную 2 гидро-Одновременно по линии 17 рабочая жидфнии, гидродвигатель 3 с выходным зве-кость из напорной гидролини и 1 поступаfjoM 4, кинематически связанным с крано-ет в линию 17 гидрораспределителя 5.
Е|ЫМ гидрораспределителем 5. Гидродвига- При дальнейщем вращении гидродвигателя 3
1|ель 3 подключен к напорной и сливнойпроисходит соединение линии 18 и 22 гидроНидролиниям через направляющий гидрорас-распределителя 5, чем обеспечивается подаг|ределитель 6. Гидроуправляемый тормоз 7,ча гидравлического сигнала в управляющую
размещенный с возможностью взаимодейст-полость 23 гидрораспределителя 10. При этом
Е)ия с выходным звеном 4, включает пру-20 рабочая жидкость из гидроцилиндра 9 по
фсину 8 и гидроцилиндр 9. Гидрораспре-линиям И и 12 сливается в бак 13, что ;|1елитель 10 линией 11 подключен к гидро- 1|1илиндру 9, линией 12
приводит к срабатыванию тормоза 7 под действием пружины 8 и останову выходного звена 4 в заданной координате. Последующим отключением электромагнита
к баку 13, а
„Линией 14 подключен к напорной гидро- „IIHHHH 1. Кроме того, напорная гидроли1НИЯ 1 связана с линией 15 гидрорас- 25 („g обозначен) гидрораспределителя 6 при- йределителя 16, выходная линия 17 которого вод готовится к осуществлению следующего подключена к входной линии 18 кранового Гидрораспределителя 5, а также управляю|дей полости 19 гидроуправляемого клапа- (ка 20, установленного в сливной гидроцикла позиционирования.
Интенсивность процесса торможения, определяющая качество позиционирования, изменяется путем настройки клапана 20 и
,1.. -v, „........,.. -v...,|- ,j по1У1 пл 1 „л iijiv ivi nai ipv7rii ri с
|1инии 2, посредством дополнительной гидро- подбором параметров тормоза 7.
Линии 21: Выходная линия 22 кранового Гидрораспределителя связана с управляющей полостью 23 гидрораспределителя 10 kepe3 гидролинию 24 и линией 25 гидро- Ьаспределителя 16, выходная линия 26 ко- горого подключена к баку 13.
35
Предварительное торможение клапаном 20 приводит к повышению точности позиционирования, повыщению надежности путем исключения резкого нарастания давления в сливной гидролинии 2.
Формула изобретения I Гидравлический позиционный привод ра|ботает следующим образом.Гидравлический позиционный привод, со При подаче электрического сигнала на держащий напорную и сливную гидроли- :направляющий гидрораспределитель 6 рабо- 40 нии, гидродвигатель с выходным звено.м, чая жидкость из напорной гидролинии 1кинематически связанным с крановым гидропоступает в гидродвигатель 3. Слив рабочей жидкости из последнего осуществляется через гидрораспределитель 6,сливную гидролинию 2 и Гидроуправляемый клапан 20 можностью взаимодействия с выходным в бак 13. При отсутствии давления в звеном, при этом гидродвигатель подклю- гидролинии 21 за счет начальной регулировки клапана 20 обеспечивается не- болыпой подпор рабочей жидкости. Кроме того, электрический сигнал подается на гидрораспределитель 16 и последний .переклю- Q и быстродействия путем предварительного чается-в позицию, при которой управляю-торможения, привод снабжен дополнительщая полость 23 и линия 22 сообщеныной гидролинией, сообщающей управляюс баком 13. При этом гидроцилиндр 9 щую полость клапана с входной линией подключается к напорной гидролинии 1 че-кранового гидрораспределителя.
Составитель в. Коваль
Редактор Н. БобковаТехреЛ И. ВересКорректор В. Бутяга
Заказ 4141/36Тираж 652Подписное
ВНИИПИ Государственного комитета СС СР по делам изобретений и открытий
И3035, .Москва. Ж-35. Раушская наб., д. 4/5 Производственно-полиграфическое иредприятие, г. Ужгород, ул. Проектная.
распределителем, Гидроуправляемый клапан, установленный в сливной гидролинии, и гид- роуправляемый тормоз, размещенный с возчен к напорной и сливной гидролиниям через направляющий тидрораспределитель, отличающийся тем, что, с целью повышения точности позиционирования, надежности
рез гидрораспределитель 10, отжимая пружину 8 и отключая тормоз 7. Выходное звено 4 гидродвигателя 3 и крановый гидрораспределитель 5 вращаются в требуемом направлении. При подходе к заданной координате менее, чем за один оборот звена 4 до останова, осуществляется отключение электрического сигнала от гидрораспределителя 16, который, переключаясь, сообщает дополнительную гидролинию 21 с
напорной гидролинией 1. Вследствие этого
линиям И и 12 сливается в бак 13, что
приводит к срабатыванию тормоза 7 под действием пружины 8 и останову выходного звена 4 в заданной координате. Последующим отключением электромагнита
(„g обозначен) гидрораспределителя 6 при- вод готовится к осуществлению следующего
(„g обозначен) гидрораспределителя 6 при- вод готовится к осуществлению следующего
цикла позиционирования.
Интенсивность процесса торможения, определяющая качество позиционирования, изменяется путем настройки клапана 20 и
по1У1 пл 1 „л iijiv ivi nai ipv7rii ri с
подбором параметров тормоза 7.
можностью взаимодействия с выходным звеном, при этом гидродвигатель подклю- и быстродействия путем предварительного торможения, привод снабжен дополнительраспределителем, Гидроуправляемый клапан, установленный в сливной гидролинии, и гид- роуправляемый тормоз, размещенный с возможностью взаимодействия с выходным звеном, при этом гидродвигатель подклю- и быстродействия путем предварительного торможения, привод снабжен дополнительчен к напорной и сливной гидролиниям через направляющий тидрораспределитель, отличающийся тем, что, с целью повышения точности позиционирования, надежности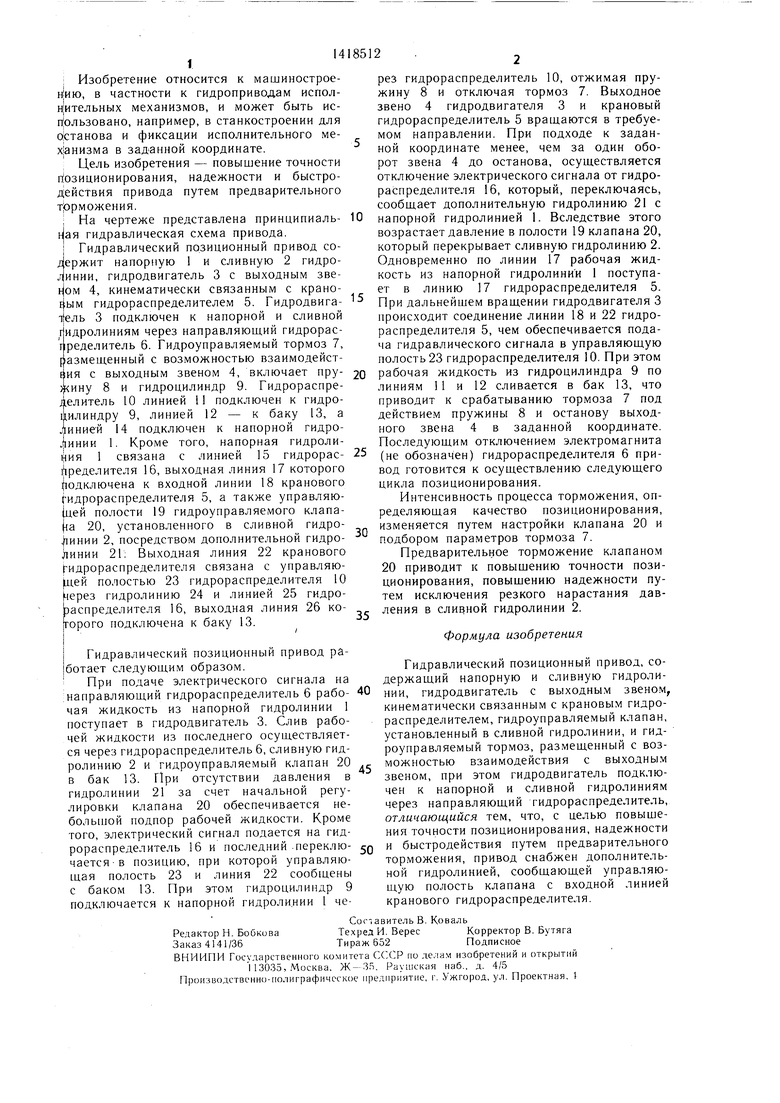
| название | год | авторы | номер документа |
|---|---|---|---|
| Гидравлический позиционный привод | 1988 |
|
SU1668746A1 |
| Гидравлический позиционный привод | 1987 |
|
SU1460436A2 |
| Гидравлический позиционный привод | 1985 |
|
SU1280207A1 |
| ГИДРАВЛИЧЕСКИЙ ПОЗИЦИОННЫЙ ПРИВОД | 2009 |
|
RU2458261C2 |
| Гидравлический позиционный привод | 1988 |
|
SU1541422A1 |
| Гидравлический позиционный привод | 1984 |
|
SU1177559A1 |
| УСТРОЙСТВО ДЛЯ ПОДАЧИ ДЛИННОМЕРНОГО ПРОКАТА В ЗОНУ ОБРАБОТКИ | 1994 |
|
RU2104115C1 |
| Бетононасос | 1986 |
|
SU1402712A1 |
| Протаскивающее устройство лесозаготовительной машины | 1988 |
|
SU1576323A1 |
| ГИДРОПРИВОД | 1994 |
|
RU2087754C1 |
Изобретение м. б. использовано в станкостроении. Пель изобретения - повышение точности позиционирования, надежности и быстродействия привода путе.м предварительного торможения. Выходное звено 4 гидродвигателя 3 кинематически связано с крановым гидрораспределителем (ГР) 5 и гидроуправляемым тормозом 7. Тормоз 7 содержит пружину 8 и гидроцилиндр 9, подключенный к напорной гидролинии (ГЛ) I и баку 13 через ГР 10, управ, 1ЯЮ1цая полость 23 к-рого связана с в.ходной линией 22 ГР 5. В сливной ГЛ 2 установлен клапан 20, полость 19 управления к-рого сообщена с в.ходной линией 18 ГР 5. При подходе звена 4 к заданной координате за один оборот до останова полость 19 через ГГ 16 сооб- П1ается с ГЛ 1, и клапан 20 перекрывает ГЛ 2. Одновременно переключается ГР ,5 и подает рабочую жидкость в полость 23 ГР 10, к-рый сообщает гидроцилиндр 9 с баком, что приводит к срабатыванию тормоза 7 и останову звена 4. Интенсивность процесса торможения pei-y- лируется настройкой клапана 20 и тормоза 7. I ил. CQ ел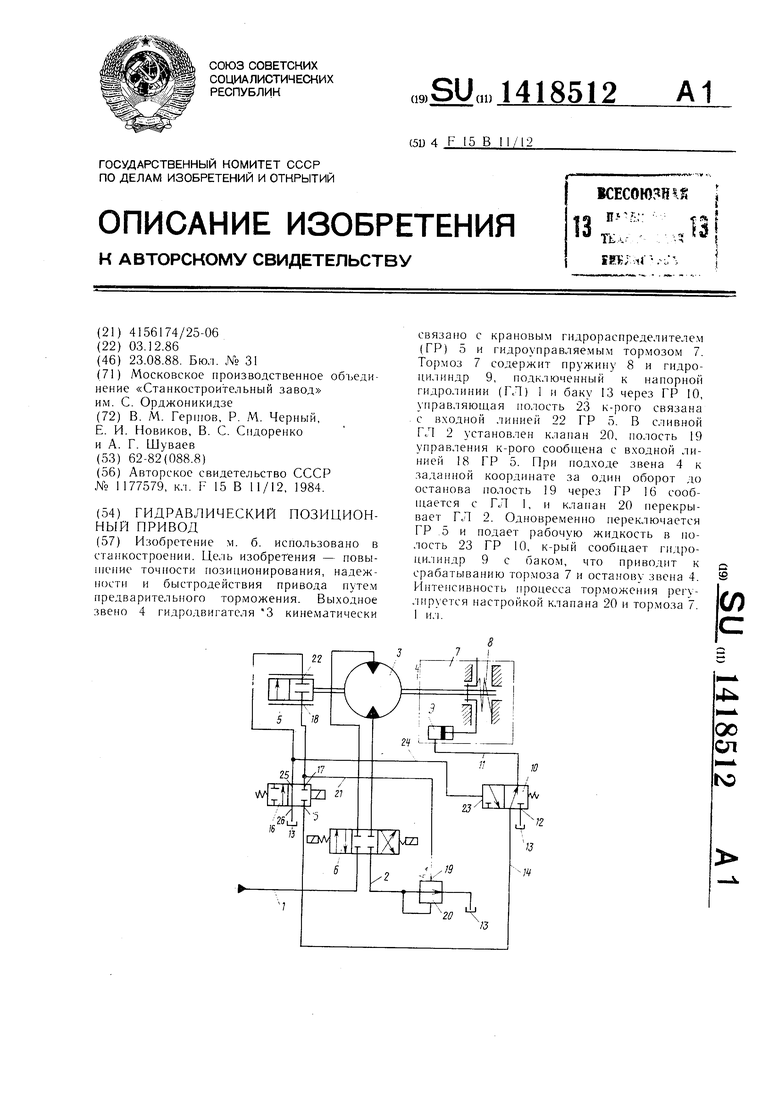
| Авторское свидетельство СССР № 1177579, кл | |||
| Прибор для нагревания перетягиваемых бандажей подвижного состава | 1917 |
|
SU15A1 |
