(Л
4
00 05
to
OCI
С5рос
Изобретение отнс снтся к измерн- rujifjH(M i г ехнике н может ис:поль- човатьс.я преимуп5г ствеино в автономных цнфроиых измерителях для оп- роделергия направления lyn-- стви г ельных элементов в виде ревер- cHBiiiiix лопастных винтоп Смежи.ыни областями применения устройства являются метесфология и гил,равлика. где оно может использоваться в соста зе винтовых анемометров и расходомет- ров.
Целью изобротекмя является повьипе- ние иаделсности и уменьшение ыощноС - ти потребления
На чертеже показана функглиональ- ная схема устройства
Устройство содержит два датчика 1 и 2, расположенных та Кд что их зоны срабатывания частично перекрываются.
узел
т
индикации направления вра п;ения, выполненньы в виде двух одинако Е.ЫХ каналов 4 и 5, Первый канал 4 содержит последовательно соединен- ные триггеры 6-8, второй канал 5 - триггеры 9 - 11. Выходы датчиков 1 и 2 соединены с прямьЕ и динамическими С-входами триггеров 6 и 9 соответственно и инверс;{ьми Р.-входами триг героБ. 7 5 9 и б„ ПЗ соответственно прямые К- Входы тт)иггеров 8 и 11 согдинены с входом Сброс,
Устройство работает следующим образ о i- i.
За исходное состояние принижается
момент времени, когда исполнительные третьи триггеры 8 и 11 обоих каналов сброшены в О по шине Сброс а оба датчика 1 и 2 вырабатывают ну- левой сигнал, что определяет сброшенное в О состояние предварительных триггеров 6,7 к 9- 10.
Предположртм, что вращение осуп;е- ствляется в направлении 4- при ко- тором сначала происходит срабатывани датчика 2, затем датчика 1, а потом их выключение в той же последовательности,. При срабатывании датчика 2 подключенный к нему триггер 9 остает ся сброшеннъм в О нулевьм сигналом датчика 1 следовательно, состояние всех триггеров не изменяется, В последующий момент срабатьюания датчика 1 на прямом динамическом С входе триггера 6 происходит изменение сигнала с О на 1, устанавливающее его в состояние М, поскольку на инверсный R-вход тригг э. 6 ранее сра-
ботавипп ; датчик 2 подает сигнал 1. Зптем при выключении датчика 2 триггер 6 сигналом О по инверсному R- входу сбрасывается в О, следователно, на инверсном д1-;намическом С-вхо- де триггера 7 происходит изменение сигнала с 1 на О, устанавливающе его в состояние 1,; поскольку датчик 1 еще вк1тючен и на т5нверсном R-входе триггера 7 имеется сигнал М, Далее изменение сигнала с О на 1 на прямом динамическом С-вхо- де триггера 8 устанавливают его в сотояние 1 % индицируя тем самым соответствующее направление- вращения, Через время,, определяемое быстродействием последующих внешних устройств триггер 8 будет сброшен в О сигналом подаваемым по шине Сброс на его R-вход, Поскольку быстродействие внешних устройств обработки информации о направлении вращения, являющихся по своей структуре чисто электронными, значительно выше, чем быстродействие электронно-механического устройства, поступление сигнала Сброс всегда опережает следующий цикл индикации направления вращения, Во гвращение устройства в исходное состояние происходит при последующем выключении датчика 1, когда на инверсный R--вxoд триггера 7 подается сигнал О, сбрасывающий его в нулевое состояние,
В случае противоположного направления вращения соответствующая последовательность срабатывания датчиков вызывает появление единичного сигнала на выходе триггера 11 второго канала.
Формула изобретения
Устройство для определения направления вращения, содержащее два датчика с перекрывающимися зонгзми срабатывания и узел индикации направления вращения, выполненньп в виде двух одинаковых каналов, причем ка;(- дый из каналов содержит по два триггера, отличающееся тем, что, с целью повышения надежности и уменьшения мощности потребления, в состав каждого канала введен третий триггер, выходы первого и второго датчиков соединены с прямыми динамическими С-входами первых тригтеров первого и второго каналов соответ- .
31 18623
ственно, инверсными R-входамн пер- единены с входом Сброс, а в каж- вых триггеров второго и первого кана- Д канале выходы первых триггеров лов соответственно и инверсными соединены с инверсными динамическими
R-входами вторых триггеров первогоg С-входами вторых триггеров, выходы
и второго каналов соответственно, которых соединены с прямыми динами- :прямые R-входы третьих триггеров со- ческими С-входами третьих триггеров.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для многоточечной сигнализации | 1989 |
|
SU1621067A1 |
| Формирователь сигналов управления | 1988 |
|
SU1552363A1 |
| Многоканальное устройство для опроса датчиков | 1983 |
|
SU1112369A1 |
| Устройство для контроля направления перемещений | 1982 |
|
SU1078242A1 |
| МНОГОКАНАЛЬНЫЙ ЦИФРОВОЙ ФИЛЬТР | 1991 |
|
RU2029361C1 |
| Устройство для управления динамической памятью | 1990 |
|
SU1783582A1 |
| РЕВЕРСИВНЫЙ ДИСКРЕТНЫЙ ДАТЧИК ПЕРЕМЕЩЕНИЙ | 2005 |
|
RU2292013C1 |
| Аналого-цифровое устройство для управления токарным станком | 1980 |
|
SU947830A1 |
| Пневматическая система для управления кранами многониточной газораспределительной станции | 1982 |
|
SU1083162A1 |
| Динамическое запоминающее устройство и формирователь синхросигналов для него | 1980 |
|
SU936030A1 |
Изобретение относится к измерительной технике. Цель изобретения - повьлпение надежности и уменьшение мощности потребления. Датчики 1 и 2 с перекрывающимися зонами срабатьгоа- ния формируют исходные сигналы, которые обрабатываются двумя одинаковыми каналами 4 и 5, состоящими из однотипных триггеров-защелок 6,7,8 и 9,10,11 соответственно. При положительном направлении вращения единичный сигнал возникает на выходе канала 4, при отрицательном - на выходе канала 5. 1 ил.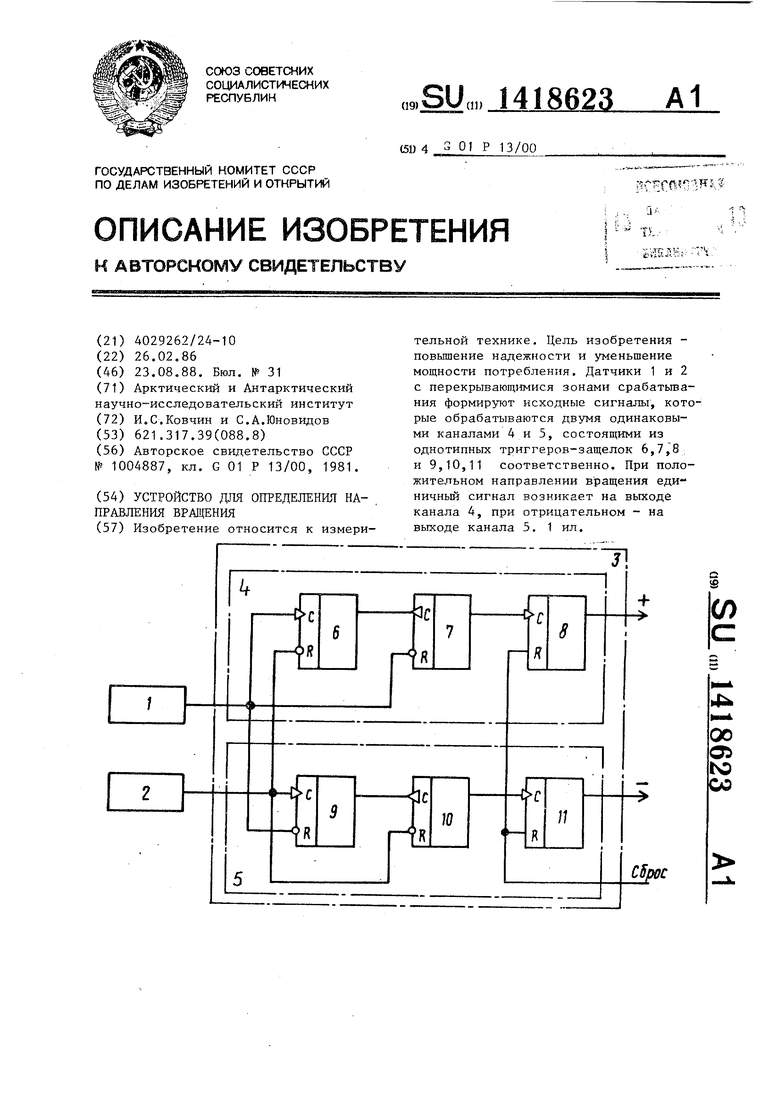
| Устройство для счета числа оборотов | 1981 |
|
SU1004887A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
