1
Изобретение относится к электротехнике и может быть использовано в элек троприводах промьшшенных робото и манипуляторов.
Цель изобретения - расширение фу циональных возможностей путем создания взаимосвязанного с вращательным движением ротора винтового движения якоря.
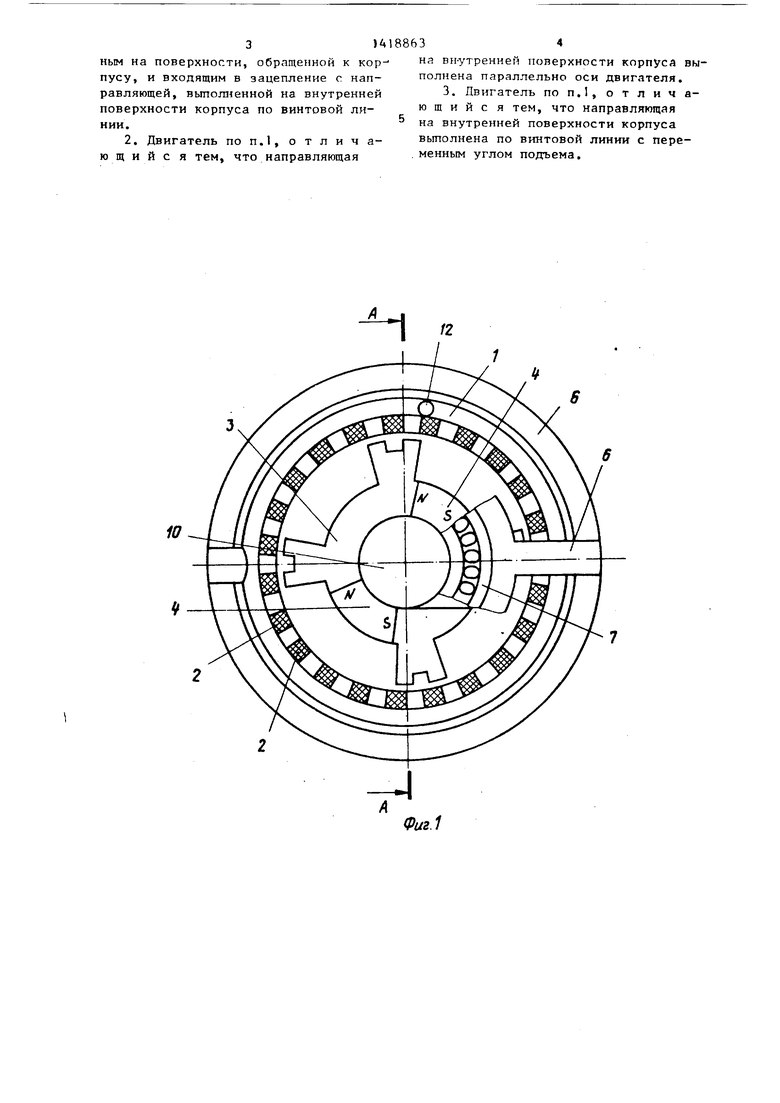
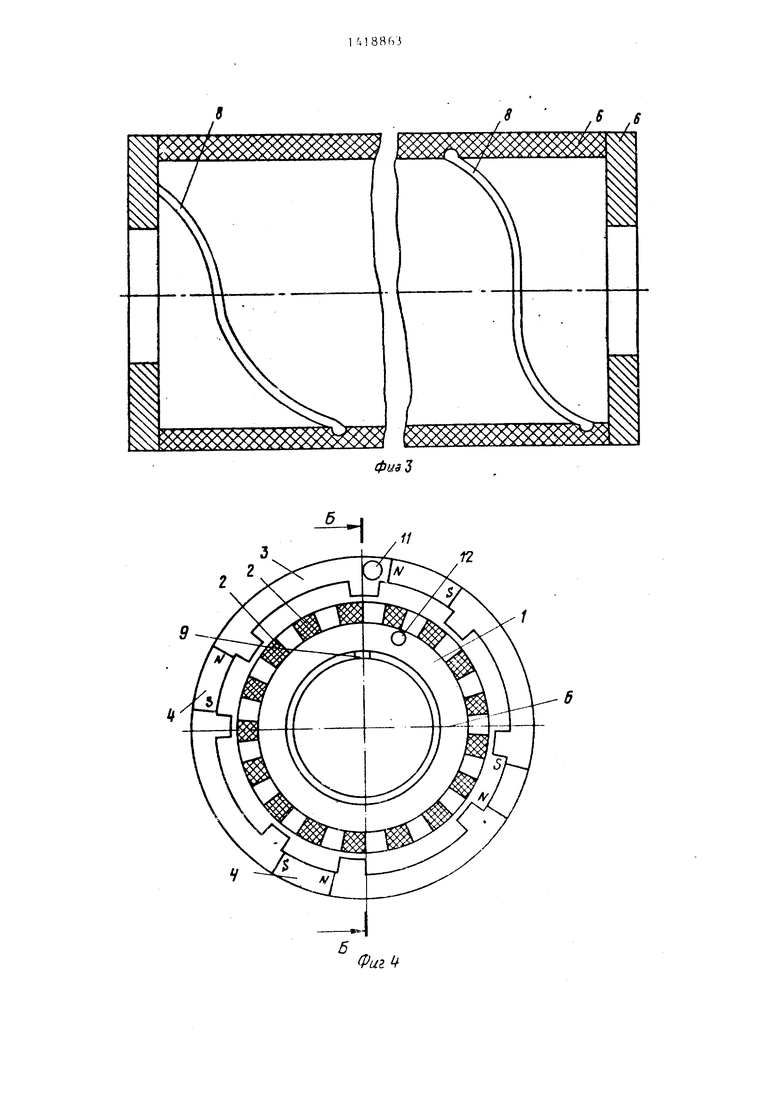
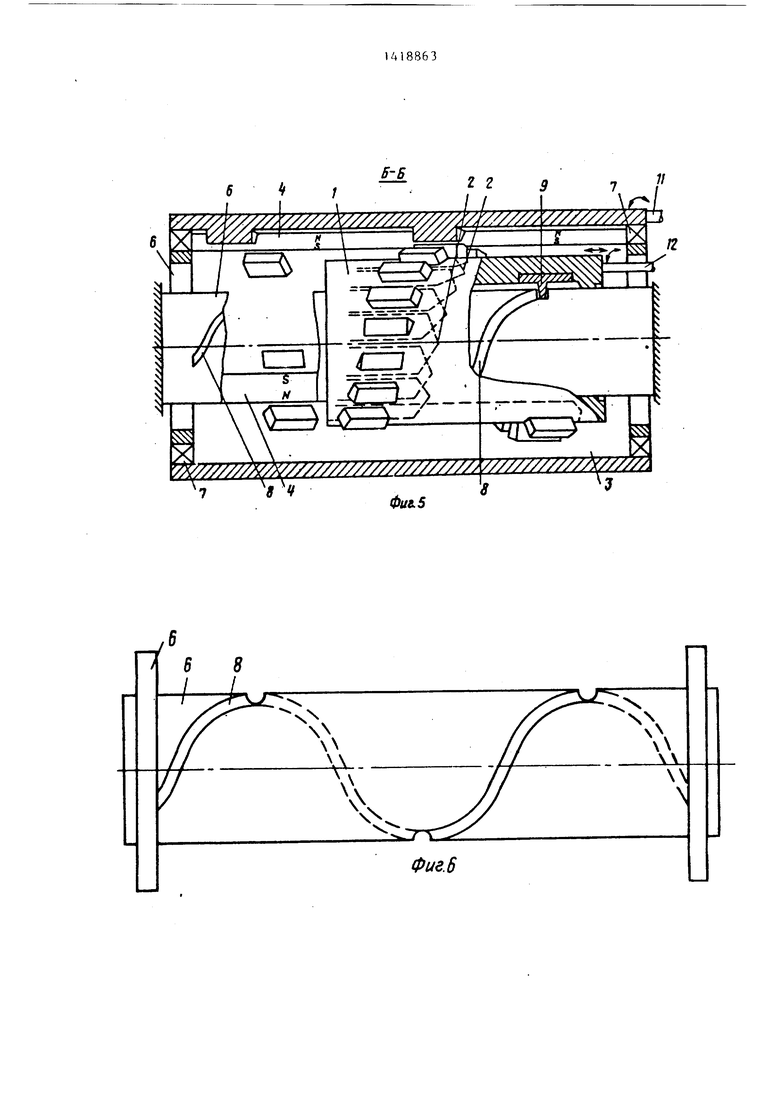
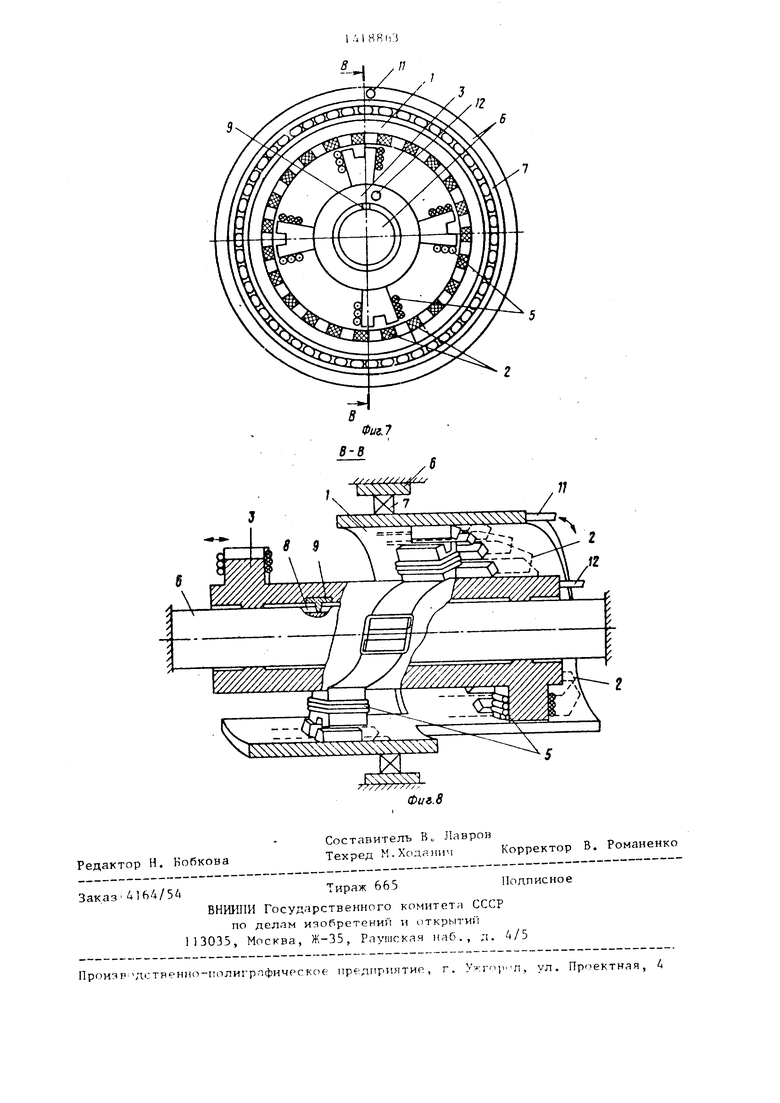
На фиг. 1 изображен двигатель с наружным якорем и внутренним ротором; на фиг. 2 - разрез А-А на фиг. на фиг. 3 - корпус двигателя; на фиг. 4 - двигатель с наружным ротором и внутренним якорем; на фиг. 5 разрез Б-Б на фиг. 4; на фиг о 6 - основание двигателя; на фиг. 7 - обращенный вариант двигателя по фиг.А с обмоткой возбуждения; на фиг,8 - разрез В-В иа фиг. 7,
Электрический двигатель содержит винтообразный якорь 1 с обмотками 2 в его пазах, явиополюсный, винтооб- разйый ротор 3 с постоянными магнитами А или Обмотками 5 возбуждения и корпус 6, Одна из активных частей якорь ) (фиг. 7, 8) или ротор 3 (фиг. 1,2,,4, 5) - имеет возможность вращения относительно корпуса на подшипниках 7 качения. Другая активная часть - ротор 3 (фиг.7, 8) или якорь 1 (фиг.1, 2, 4, 5) - имее возможность перемещения относитель- ио корпуса 6 по направляющей 8, выполиенной в корпусе 6, при помощи пальца 9, закрепленного на этой части. Вращающаяся активная часть имее выходной вал 10 (фиг. 1, 2) или щто 11 (фиг. 4, 5, 7, 8). Активная част перемещающаяся винтообразно, имеет выходной щток 12 (фиг.1, 2, 4, 5, 7. 8).
Электрический двигатель работает следующим образом.
При взаимодействии постоянного электромагнитного поля ротора 3 с дискретно изменяемым электромагнитным полем якоря 1 возникают усилия между зубцами якоря 1 и полюсами ротора 3. Под воздействием этих усили якорь 1 и ротор 3 стремятся переместиться навстречу друг другу и заня такое роложение, чтобы полюс ротора 3 находился под зубцом якоря . Поскольку обе активные части двигателя имеют подвижность относительно корпуса 6 и могут перемещаться только по своим траекториям, то ротор 3 я
10
15
20
25
-5
40
30
35
5
0
5
ei o полюс переместятся по траектории вращения, а якорь 1 и его зубец переместятся по винтообразной траектории. Совокупность взаимодействий между зубцами якоря 1 и полюсами ротора 3 во всем рабочем зазоре перемещает якорь 1 и ротор 3 относительно неподвижного корпуса по своим траекториям.
Реализуя различные углы подъема винтовой линии магнитных структур и винтовой линии направляющей, а также их взаимное соотношение, можно получать различные шаги перемещений обеих активных частей двигателя. Для улучшения условий винтообразного перемещения активной части относительно корпуса зазор между ними может быть заполнен смазкой. Для этих целей корпус может быть изготовлен из материала с малым коэффициентом трения, например из полиэтилена высокого давления. Поскольку корпус не несет электромагнитной функциональной нагрузки, то в его качестве могут быть использованы любые неподвижные элементы конструкции, окружающие предлагаемый двигатель. В этом случае электрический двигатель удобно применять как встроенный исполнительный элемент.
Электрический двигатель расширяет функциональные возможности и позволяет одновременно и взаимосвязано перемещать два объекта по различным траекториям. Изобретение позволяет повысить точность перемещения и останова объектов и перемещать объекты с переменными шагами и по винтовой траектории с переменным углом подъема винтовой линии Формула изобретения
1. Электрический двигатель постоянного тока, содержащий корпус с размещенным в нем якорем с магнитопро- водом, зубцы которого расположены по винтовой линии, а в его пазах уложена якорная обмотка, ферромагнитный ротор с выступами, размещенными по винтовой , и систему возбуждения, отличающийся тем, что 5 с целью расширения функциональных возможностей путем создания взаимосвязанного с вращательным движением ротора винтового дв гжения якоря, якорь отделки от корпуса зазором и уст.чновлен р нем с возможностью вращательного и поступательного движения и cH.ir -Keff гтплт.псм, закрепленным на поверхности, обращенной к корпусу, и входящим в зацепление с направляющей, вьтолненной на внутренней поверхности корпуса по винтовой линии.
2. Двигатель поп.1,отлича- ю щ и и с я тем, что направляющая
на внутренней поверхности корпуса выполнена параллельно оси двигателя.
3. Двигатель по п,1, о т л ич а- ю щ и и с я тем, что направляющая на внутренней поверхности корпуса вьтолнена по винтовой линии с переменным углом подъема.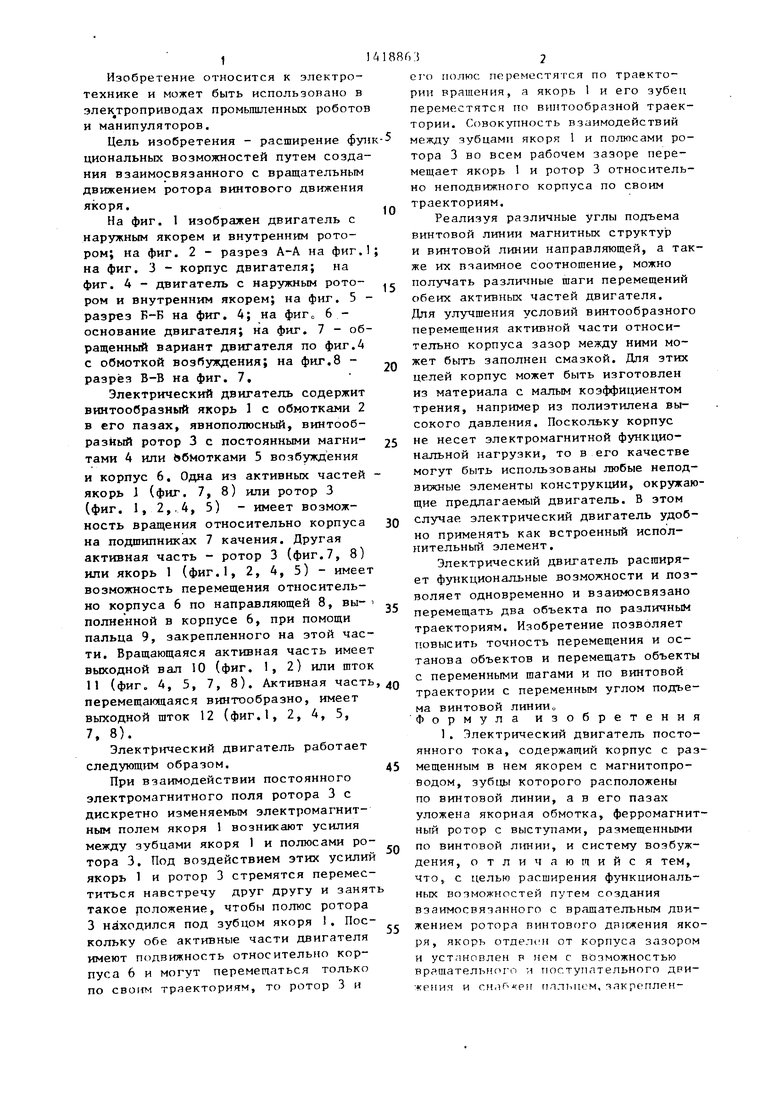
| название | год | авторы | номер документа |
|---|---|---|---|
| Однофазный электромагнитный шаговый двигатель | 1981 |
|
SU1014101A1 |
| Шаговый электродвигатель постоянного тока | 1987 |
|
SU1471261A2 |
| Линейный шаговый электродвигатель | 1973 |
|
SU476640A1 |
| Электрический двигатель постоянного тока | 1980 |
|
SU985894A1 |
| Двигатель | 2020 |
|
RU2733794C1 |
| Электрический двигатель | 1978 |
|
SU890527A1 |
| Электрический двигатель постоянного тока | 1979 |
|
SU919023A1 |
| Электрический двигатель с винтообразным статором | 1978 |
|
SU896721A1 |
| Электрический двигатель | 1981 |
|
SU983928A1 |
| ВИНТОВОЙ РЕАКТИВНЫЙ ДВИГАТЕЛЬ | 2006 |
|
RU2327877C1 |
Изобретение относится к электротехнике и может быть использовано в электроприводах промышленных роботов и манипуляторов. Целью изобретения является расширение функциональных 2 / возможностей путем создания взаимосвязанного с вращательным движением ротора винтового движения якоря. В электрическом двигателе обе активные части с винтообразными магнитными структурами вьтолнены подвижными относительно корпуса 6, одна из активных частей, например якорь 1, совершает винтообразное движение относительно корпуса 6 при помощи пальца 9 ч направляющей 8, а другая (ротор 3) - вращательное движение относительно корпуса 6. Пр1и определенном сочетании углов подъема винтовых линий магнитных структур якоря 1, ротора 3 и направляющей 8 предлагаемый двигатель позволяет получить переменные шаги активных частей. 2 з.п. ф-лы, 8 ил. е СЛ 6 00 00 а ос
/2
П
Фиг1
s н
2 „рггг
L
тм///////; ////////////////////// ///////////// ////л
т
т
Ч
Фиг. 5
8
;/
////////// ///////////// /
т
Фиг. 5
8
К
/2
К
к : Х ух1
7//// ////
| Стенд для испытаний подшипниковых узлов электрических машин | 1980 |
|
SU928534A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электрический двигатель с винтообразным статором | 1978 |
|
SU896721A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
