QO 00
со
| название | год | авторы | номер документа |
|---|---|---|---|
| Адаптивный восстанавливающий фильтр в дельта-модуляторе с двойным интегрированием | 1990 |
|
SU1795553A1 |
| Фазометр | 1985 |
|
SU1298685A1 |
| Устройство для измерения параметров вращения | 1986 |
|
SU1613960A1 |
| Способ комплексного определения теплофизических характеристик материалов и устройство для его осуществления | 1986 |
|
SU1381379A1 |
| Цифровой частотный дискриминатор | 1982 |
|
SU1131036A1 |
| Измеритель комплексных параметров СВЧ-четырехполюсника | 1989 |
|
SU1800394A1 |
| Устройство для программного счета изделий | 1985 |
|
SU1365103A1 |
| Синтезатор интервалов времени | 1986 |
|
SU1406558A1 |
| СПОСОБ КОДИРОВАНИЯ ЦИФРОВЫХ СИГНАЛОВ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1999 |
|
RU2168270C2 |
| Устройство измерения частотных характеристик группового времени запаздывания четырехполюсников | 1988 |
|
SU1631511A1 |

0US. f
ИзоГпетение относится к преобразовательной технике н может найти применение в системах управления полупроводниковыми преобразователями частоты.
Цель изобретет1Я - расширение функциональных возможностей устройства.
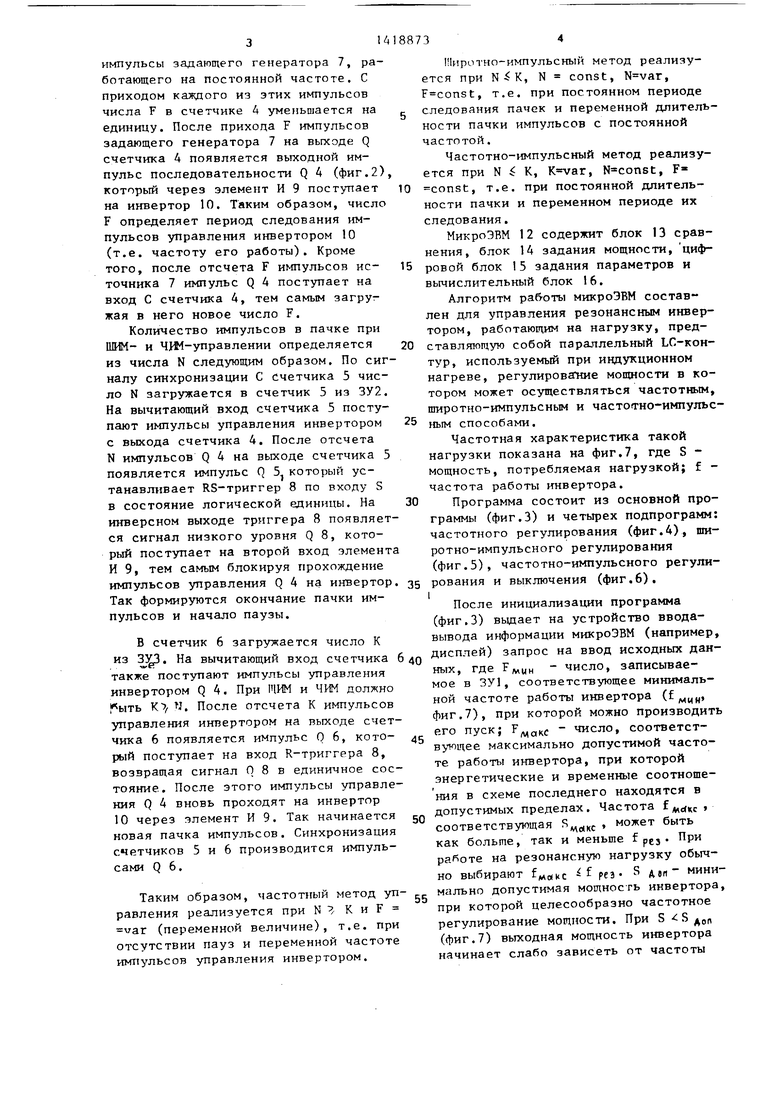
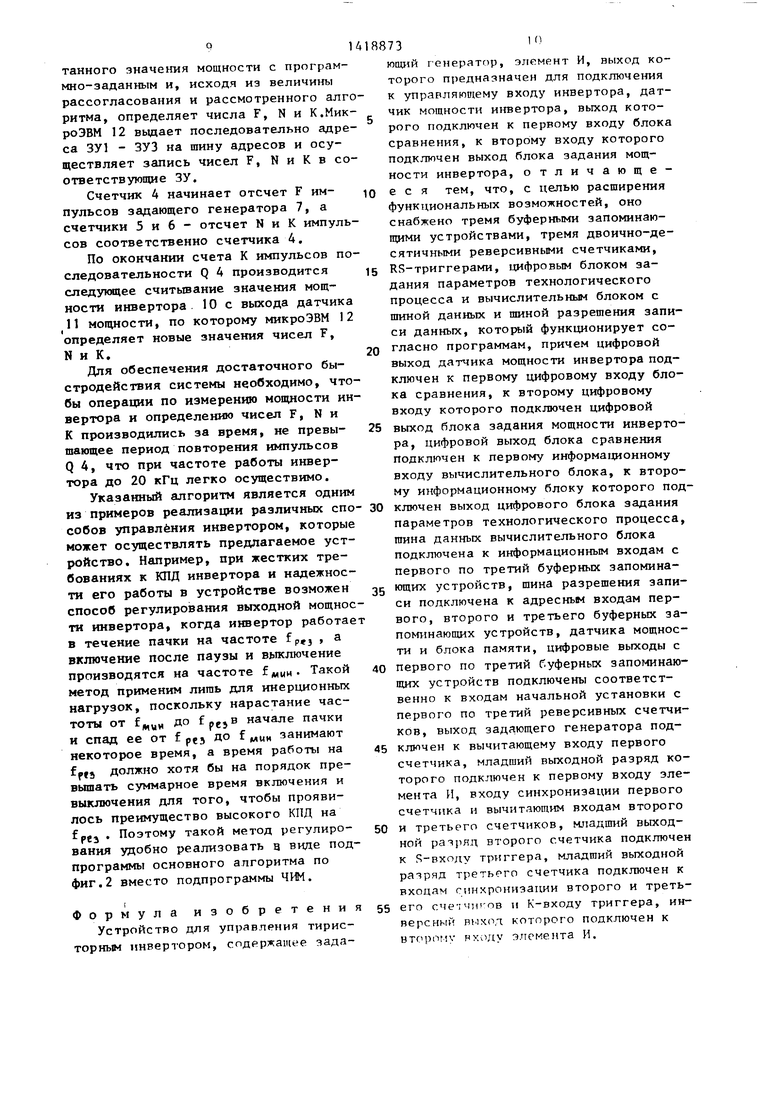
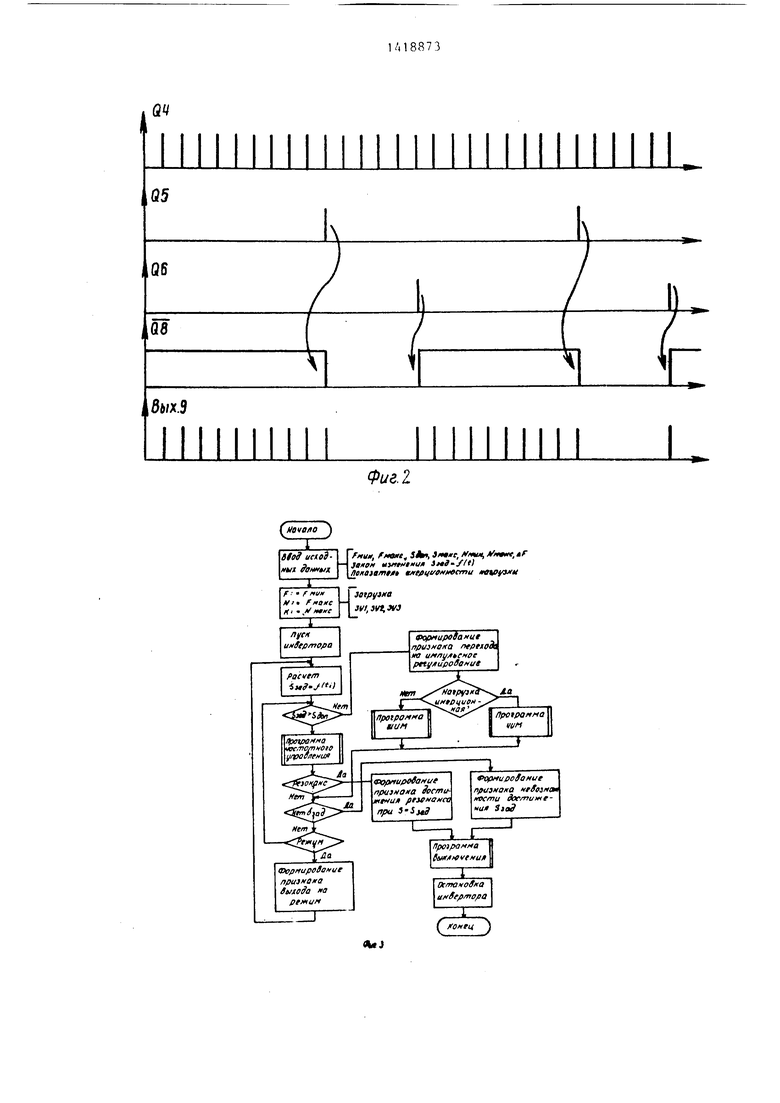
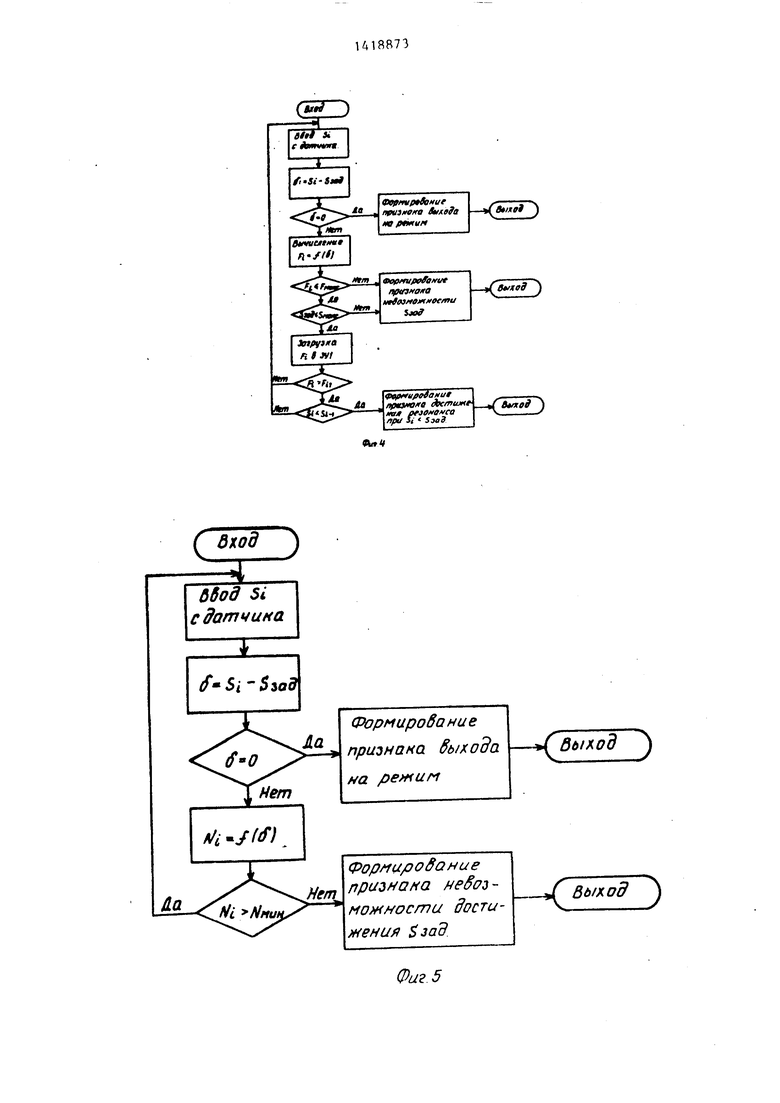
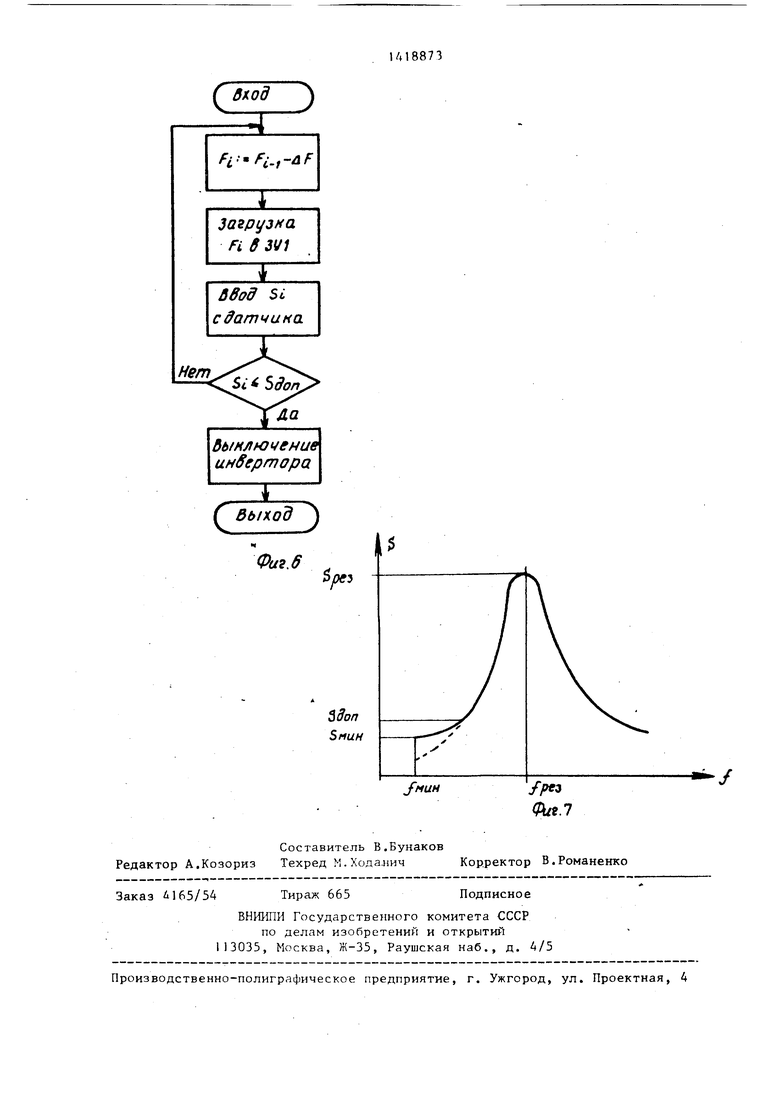
На фиг,1 показана функциональная схема устройства; на фиг,2 - временные диаграммы работы устройства; на фиг.З - основной алгоритм работы мик роЭВМ; на фиг.4 - алгоритм подпрограммы частотного способа управления; на фиг.5 - алгоритм подпрограммы тиротно-импульсного способа управления; на фиг.6 - алгоритм подпрограммы выключения инвертора; на фиг.7 - частотная характеристика нагрузки.
Устройство содержит буферные запоминающие устройства 1 - 3 (ЗУ - ЗУЗ), реверсивные счётчики 4-6, задающий генерагор 7, RS-триггер 8, элемент И 9, инвертор. 10, датчик 11 инвертора, а также блоки, функционально объединенные микроЭВМ 12, блок 13 сравнения, блок 14 зада
НИН мощности инвертора, цифровой блок 15 задания параметров технологического процесса, вычислительный блок 16, который содержит информационные входы 17 и 18, цшну 19 данных и пшну 20 разрешения записи.
Устройство работает следующим об-, разом.
Датчик 11 мощности вырабатьшает значение мощности инвертора 10 в цифровом коде (например, при помощи аналого-цифрового преобразователя). Блок 13 сравнения сравнивает цифровые коды зна1(ений мощности инвертора со значением заданной мощности по технологической программе работы инверто- ра, которая задается блоком 14 зада кия мощности. Последний представлять собой, например, устройство памяти, где записана технологическая программа работы инвертора - зависимость мощности от времени t (t),, или пульт управления оператора с устройством ввода-вывода информации (на- npijMep, алфавитно-цифровым дисплеем)
за
В :sTOM случае зависимость (t) дается оператором вручную.
1Ди1прово11 код сигнала рассогласования с ьи.гхода блока I 3 сравнения поступает на первый ин формацион 1ый вход
Q
5
0
5
0
5
Q г
0
5
17 вычислительного блока 16. В блоке 15 хранятся значения исходных параметров технологического процесса, которые поступают на второй ии1)ормациок- ный вход 18 вычислительного блока 16 по сигналу обращения, поступающему из вычислительного блока по шине 20 разрешения записи на адресный вход блока 15 и представляющему собой адрес (цифровой код) соответствующей ячейке блока 15, где хранится требуемый параметр.
Вычислительн 1Й блок 16 по величине сигнала рассогласовьшания на первом информационном 17, а также в зависимости от исходных параметров рассчитывает по заложенному в нем алгоритму три числа: F, N и К, которые заносятся по шине 19 данных в ЗУI-ЗУЗ. Значения F, N и К определяют способ управления инвертором.
В ЗУ1 записывается число F, определяющее частоту импульсов управле- ния инвертором. В ЗУ2 записывается число N, определяющее длительность пачки (количество импульсов управления инвертором в пачке) при широтно- импульсном и частотно-импульсном способах управления. В ЗУЗ записывается число К, которое определяет период следования пачек.
Запись этих числе в ЗУ I-ЗУЗ осуществляется следующим образом. После расчета вычислительный блок 6 выдает на шину 20 разрешения записи адрес ЗУ1, а затем на шину данных - , число F. После записи F по указанному на шине 20 разрешения записи адресу, т.е. в ЗУ1, число и адрес снимаются с шин, и на шину 20 разрешения, записи вьщаются адрес ЗУЗ и число N, затем аналогичным образом в ЗУЗ записывается число К.
По шине 20 разрешения записи также . происходит обращение к датчику 11 мощности для .считывания цифрового .кода значения мощности инвертора, который поступает на первый цифровой вход блока 13 сравнения, а также обращение к блоку 15 для считьшания значений исходных параметров техпроцесса.
Частота работы инвертора определяется из числа F следующим образом. По сигналу синхронизаш1и выхода реверсивного счетчика 4 число F загружается в счетчик 4. На вычитающий вход счетчика 4 постоянно поступают
импульсы задающего генератора 7, работающего на постоянной частоте. С приходом каждого из этих импульсов числа F в счетчике А уменьшается на единицу. После прихода F импульсов задающего генератора 7 на выходе Q счетчика А появляется выходной импульс последовательности Q А (фиг.2) который через элемент И 9 поступает на инвертор 10. Таким образом, число F определяет период следования импульсов управления инвертором 10 (т.е. частоту его работы). Кроме того, после отсчета F иьшульсов не- точника 7 импульс Q А поступает на вход С счетчика А, тем самым загружая в него новое число F.
Количество импульсов в пачке при ШИМ- и Ч ИМ-управлении определяется из числа N следующим образом. По сигналу синхронизации С счетчика 5 число N загружается в счетчик 5 из ЗУ2. На вычитающий вход счетчика 5 поступают импульсы управления инвертором с выхода счетчика А. После отсчета N импульсов Q А на выходе счетчика 5 появляется импульс Q 5 который устанавливает RS-триггер 8 по входу S в состояние логической единицы. На инверсном выходе триггера 8 появляется сигнал низкого уровня Q 8, который поступает на второй вход элемент И 9, тем самым блокируя прохождение импульсов управления Q А на инвертор Так формируются окончание пачки импульсов и начало паузы.
В счетчик 6 загружается число К из 33р. На вычитающий вход счетчика также поступают импульсы управления инвертором Q А. При ЩИМ и ЧИМ должно ытъ К / N. После отсчета К импульсов управления инвертором на выходе счетчика 6 появляется импульс О 6, кото- рый поступает на вход R-триггера 8, возвращая сигнал О 8 в единичное состояние. После этого импульсы управления Q А вновь проходят на инвертор 10 через элемент И 9. Так начинается новая пачка импульсов. Синхронизация счетчиков 5 и 6 производится импульсами Q 6.
Таким образом, частотный метод уп равления реализуется при N / К и F var (переменной величине), т.е. при отсутствии пауз и переменной частоте импульсов управления инвертором.
1иротно-импульсный метод реализуется при , N const, , F const, т.е. при постоянном периоде следования пачек и переменной длительности пачки импульсов с постоянной частотой.
Частотно-импульсный метод реализуется при N К, , N const, F const, т.е. при постоянной длительности пачки и переменном периоде их следования.
Микроэвм 12 содержит блок 13 сравнения, блок 1А задания мощности, цифровой блок 15 задания параметров и вычислительный блок 16.
Алгоритм работы микроЭВМ состав лен для управления резонансным инвертором, работающим на нагрузку, пред- ставл5дащую собой параллельный LC-кон- тур, используемый при индукционном нагреве, регулировагние мощности в котором может осуществляться частотным, широтно-импульсным и частотно-импульсным способами.
Частотная характеристика такой нагрузки показана на фиг.7, где S - мощность, потребляемая нагрузкой; f - частота работы инвертора.
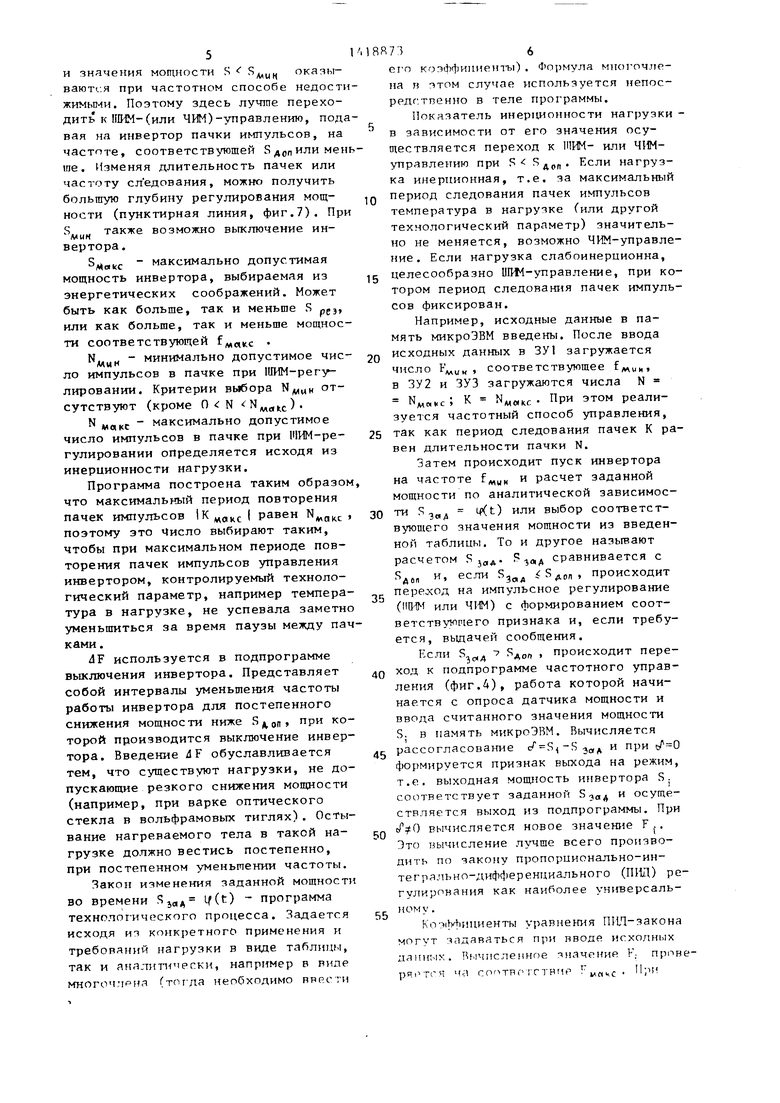
Программа состоит из основной программы (фиг.З) и четырех подпрограмм частотного регулирования (фиг.А), ши- ротно-импульсного регулирования (фиг.З), частотно-импульсного регулирования и выключения (фиг.6), I
После инициализации программа
(фиг.З) выдает на устройство ввода- вывода информации микроэвм (например дисплей) запрос на ввод исходных данных, где ГЛ,УН - число, записываемое в ЗУ1, соответствующее минимальной частоте работы инвертора (f ц фиг.7), при которой можно производить его пуск; ,c - число, соответствующее максимально допустимой частоте работы инвертора, при которой энергетические и временные соотноше- ния в схеме последнего находятся в допустимых пределах. Частота соответствующая Я , может быть как больше, так и меньше fpej При работе на резонансную нагрузку обычно выбирают (кc -f рез- Act минимально допустимая мощность инвертора при которой целесообразно частотное регулирование мощности. При S S доп (фиг.7) выходная мощность инвертора начинает слабо зависеть от частоты
5
и значения мощности S оказы- вают1,;я при частотном способе недост жимьп- и. Поэтому здесь лучтпе переходить к МИМ-(или ЧИМ)-управлению, подвая на инвертор пачки импульсов, на частоте, соответствутошей 8д,пилимен ше. Изменяя длительность пачек или частоту сл едования, можно получить большую глубину регулирования мощности (пунктирная линия, фиг.7). Пр также возможно выключение инвертора.
Макс максимально допустимая мощность инвертора, выбираемая из энергетических соображений. Может быть как больше, так и меньше S „gj, или как больше, так и меньше мощности соответствующей
мми минимально допустимое число импульсов в пачке при 111ИМ-регу- лировании. Критерии выбора отсутствуют (кроме П : N д).
макс максимально допустимое число импульсов в пачке при ШИМ-ре- гулировании определяется исходя из инерционности нагрузки.
Программа построена таким образом что максимальный период повторения пачек импульсов . | равен . поэтому это Число выбирают таким, чтобы при максимальном периоде повторения пачек импульсов управления инвертором, контролируемый технологический параметр, например температура в нагрузке, не успевала заметно уменьшиться за время паузы между пачками.
4F используется в подпрограмме выключения инвертора. Представляет собой интервалы уменьшения частоты работы инвертора для постепенного снижения мощности ниже ри которой производится выключение инвертора. Введение 4F обуславливается тем, что существуют нагрузки, не допускающие резкого снижения мощности (например, при варке оптического стекла в вольфрамовых тиглях). Остывание нагреваемого тела в такой нагрузке должно вестись постепенно, При постепенном уменьшении частоты.
Яакон изменения заданной мощности во времени jo(A ) программа технолог ического процесса. Задается исходя и: конкретного применения и требований нагрузки в виде таблицы, так и аналитически, например в яйле многочлрна (тог да необходимо ввести
5
8R736
его коэффициенты). Формула мтюгочле- на R случае используется непос- редптпенно в теле программы.
Показатель инер1Ц онности нагрузки - в зависимости от его значения осуществляется переход к 1ПИМ- или ЧИМ- Т1равлению при S доп Если нагрузка инерционная, т.е. за максимальный
Q период следования пачек импульсов температура в нагрузке (или другой технологический параметр) значительно не меняется, возможно ЧИМ-управле- иие. Если нагрузка слабоинерционна,
15 целесообразно ШШ-управление, при котором период следования пачек импульсов фиксирован.
Например, исходные данные в память микроэвм введены. После ввода
Q исходных данных в ЗУ1 загружается число , соответствующее в ЗУ2 и ЗУЗ загружаются числа N ; К ,,c . При этом реализуется частотный способ управления,
25 так как период следования пачек К равен длительности пачки N.
Затем происходит пуск инвертора на частоте f,uH расчет заданной мощности по аналитической зависимос0 ти iXt) или выбор соответствующего значения мощности из введенной таблицы. То и другое называют расчетом Я дд. Я: „д сравнивается с Яд5„ и, если Sg йдол. происходит переочод на импульсное регулирование (I4№t или Ч1 1М) с формированием соответствующего признака и, если требуется, вьщачей сообщения.
Если S 7 Ядоп , происходит перео ход к подпрограмме частотного управления (фиг.А), работа которой начинается с опроса датчика мощности и ввода считанного значения мощности S, в память м;жроЭВМ. Вычисляется
с рассогласование Ti- формируется признак выхода на режим, т.е. выходная мошдюсть инвертора S. соответствует заданной ST и осуществляется выход из подпрограммы. При
-, 0 вычисляется новое значение Fj. Это вычисление лучше всего производить по закону пропорционально-ин- тегряльно-дифференциального (ПОД) регулирования как наиболее универсальному .
Коэ|Ьфи1шенты ypHBHemiH niW-закона могут задаваться при вводе исходных ляиных. Вычисленное значение F; прпве- ча соптягчтTBrif ипчс- р
5
превьпчении F. 7 F.. формируется признак возможности достижения я,д при заданных параметрах и осуществляется выход из подпрограммы. Здесь осущест
вляется проверка S
зад
S
«„kc в случа
ЗЧА
превышения рассчитанной мо дности S над введенной S, , также производится выход из подпрограммы. В случае нахождения F; и S, в установленных пределах производится запись F, в ЗУ). Затем производится проверка на достижение резонанса. Если вычисленное значение F. больше преды- . дущего FJ., , т.е. частота увеличивается, а S . S j. 1 , т.е. мощность падает, это значит, что превышена резонансная частота нагрузки. Работа резонансного инвертора в таком режиме нежелательна и, кроме того, дальнейшим увеличением частоты достичь не удается,поэтому при выполне
нии условий F, : F- , и S S ,-.,
формируется признак достижения резонанса при S| Sj и осуп;ест- вляется выход из подпрограммы. Если S. 7 Sj J , это означает, что при возрастании частоты возрастает мощность, т.е. частота работы инвертора меньше fpes происходит переход на считьшание с датчика нового значения S .
Рассмотрим работу основной программы (фиг.З) в случае, когда меньше, чем S.. При этом целесообразен переход к импульсному регулированию. При невьтолнении условия
ЮА
7 S
А on
формируется признак пе
рехода на импульсное регулирование. Если нагрузка инерционная, осуществляется переход к подпрограмме ЧИМрегулирования (фиг.З). I
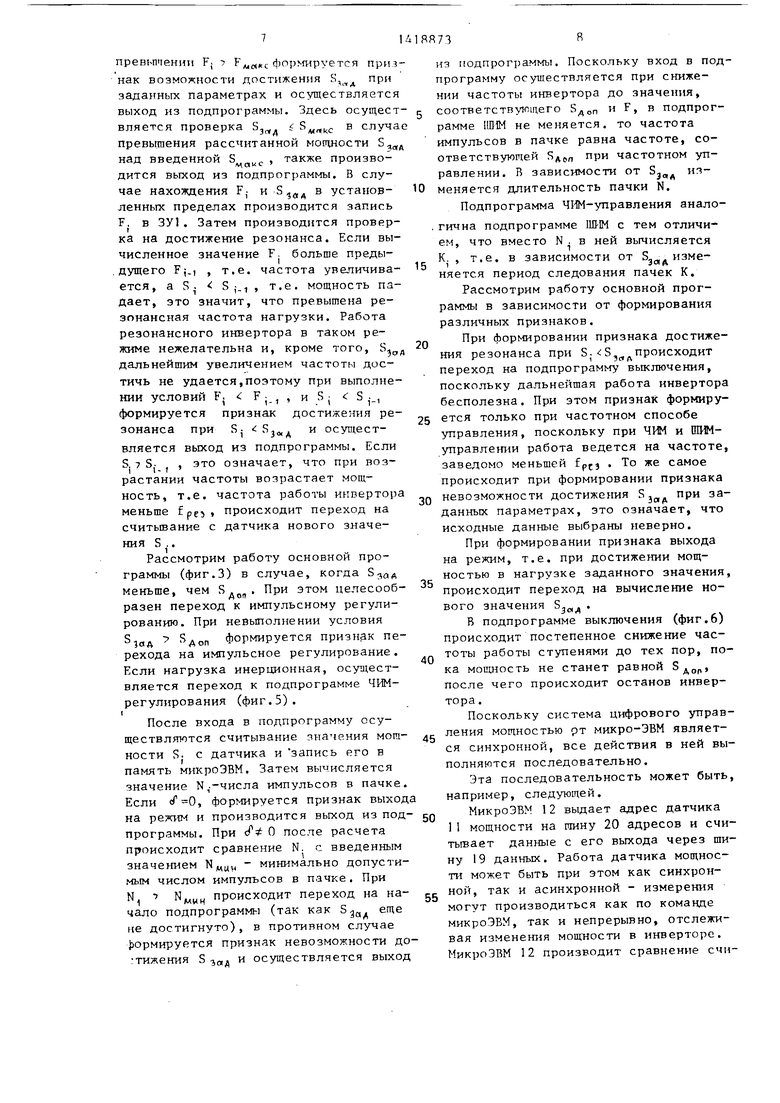
После входа в подпрограмму осуществляются считывание значения мощности S. с датчика и запись его в память микроэвм. Затем вычисляется значение N,.-числа импульсов в пачке. Если (, формируется признак выход на режим и производится выход из под- программы. При Ф О после расчета происходит сравнение N. с введенным значением (ццц - минимально допустимым числом импульсов в пачке. При N, N
. происходит переход на начало подпрограммы (так как S,,, еще не достигнуто), в противном случае {)Ормируется признак невозможности достижения S зад и осуществляется выход
- с
е
А
д
Ш
15
из подпрограммы. Поскольку вход в подпрограмму осуществляется при снижении частоты инвертора до значения, соответств тлщего F в подпрограмме 11D1M не меняется, то частота импульсов в пачке равна частоте, соответствующей Яд(,п при частотном управлении. В зависимости от S изменяется длительность пачки N.
Подпрограмма ЧИМ-управления аналогична подпрограмме 1Ш-1М ем, что вместо К, , т.е. в
20
25
30
35
40
45
а - Q
55
с тем отличиN . в ней вычисляется , -.. зависимости от S,. изме1JCT
няется период следования пачек К.
Рассмотрим работу основной программы в зависимости от формирования различных признаков.
При формировании признака достижения резонанса при S. ;5,происходит переход на подпрограмму выключения, поскольку дальнейшая работа инвертора бесполезна. При этом признак формируется только при частотном способе управления, поскольку при ЧИМ и ШИМ- управлении работа ведется на частоте, заведомо меньшей . То же самое происходит при формировании признака невозможности достижения S при заданных параметрах, это означает, что исходные данные выбраны неверно.
При формировании признака выхода на режим, т.е. при достижении мощностью в нагрузке заданного значения, происходит переход на вычисление нового значения S ,
В подпрограмме выключения (фиг.6) происходит постепенное снижение частоты работы ступенями до тех пор, пока мощность не станет равной Зд,,, после чего происходит останов инвертора .
Поскольку система цифрового управления мощностью рт микро-ЭВМ является синхронной, все действия в ней выполняются последовательно.
Эта последовательность может быть, например, следующей.
Микроэвм 12 вьодает адрес датчика 11 мощности на гаину 20 адресов и счи- тьгеает данные с его выхода через шину 19 данных. Работа датчика мощности может быть при этом как синхронной, так и асинхронной - измерения могут производиться как по команде микроэвм, так и непрерывно, отслеживая изменения мощности в инверторе. Микроэвм 12 производит сравнение считайного значения мощности с программно-заданным и, исходя из величины рассогласования и рассмотренного алгоритма, определяет числа F, N и К.Мик- роЭВМ 12 выдает последовательно адреса ЗУ1 - ЗУЗ на шину адресов и осуществляет запись чисел F, N и К в соответствующие ЗУ.
Счетчик 4 начинает отсчет F импульсов задающего генератора 7, а счетчики 5 и 6 - отсчет N и К импульсов соответственно счетчика 4,
По окончании счета К импульсов по
следовательности Q 4 производится следующее считывание значения мощности инвертора. 10 с выхода датчика 11 мощности, по которому микроэвм 12 определяет новые значения чисел F, N и К.
Для обеспечения достаточного быстродействия системы необходимо, чтобы операции по измерению мощности инвертора и определению чисел F, N и К производились за время, не превышающее период повторения импульсов Q 4, что при частоте работы инвертора до 20 кГц легко осуществимо.
Указанный алгоритм является одним из примеров реализации различньсх спо- собов управления инвертором, которые может осуществлять предлагаемое устройство. Например, при жестких требованиях к КПД инвертора и надежности его работы в устройстве возможен
способ регулирования выходной мощности инвертора, когда инвертор работает в течение пачки на частоте fp,j , а включение после паузы и выключение производятся на частоте Такой метод применим лигаь для инерционных нагрузок, поскольку нарастание частоты от f
и
до
fpejB
начале пачки
и спад ее от f реэ Д° мми занимают некоторое время, а время работы на fpo должно хотя бы на порядок превышать суммарное время включения и выключения для того, чтобы проявилось преимущество высокого КПД на fpjj . Поэтому такой метод регулирования удобно реализовать а виде подпрограммы основного алгоритма по фиг.2 вместо подпрограммы ЧИМ.
t Формула изобретени
Устройство для управления тирис- торным инвертором, содержащее зада5
0
0
5
генератор, элемент И, выход которого предназначен для подключения к управляющему входу инвертора, датчик мощности инвертора, выход которого подключен к первому входу блока сравнения, к второму входу которого подключен выход блока задания мощности инвертора, о тличающе0 е с я тем, что, с целью расширения функциональных возможностей, оно снабжено тремя буферными запоминающими устройствами, тремя двоично-десятичными реверсивными счетчиками, RS-триггерами, цифровым блоком задания параметров технологического процесса и вычислительным блоком с шиной данных и шиной разрешения записи данных, который функционирует согласно программам, причем цифровой выход датчика мощности инвертора подключен к первому цифровому входу блока сравнения, к второму цифровому входу которого подключен цифровой выход блока задания мощности инвертора, цифровой выход блока сравнения Подключен к первому информационному входу вычислительного блока, к второму информационному блоку которого подключен выход цифрового блока задания параметров технологического процесса, шина данных вычислительного блока подключена к информационным входам с первого по третий буферных запоминающих устройств, шина разрешения записи подключена к адресным входам первого, второго и третьего буферных запоминающих устройств, датчика мощности и блока памяти, цифровые выходы с
0 первого по третий буферных запоминающих устройств подключены соответственно к входам начальной установки с первого по третий реверсивных счетчиков, выход задающ.его генератора под5 ключен к вычитающему входу первого счетчика, младший выходной разряд которого подключен к первому входу элемента И, входу синхронизации первого счетчика и вычитающим входам второго
0 и третьего счетчиков, младший выходной разряд второго счетчика подключен к S-входу триггера, младший выходной разряд третьего счетчика подключен к входам синхронизации второго и треть5 его счеччигов и К-входу триггера, инверсный выход которого подключен к BTfipnny нходу элемента И.
5
0
stuff ucnoS- HHi ffaHHun
f: f яия
A fiiaxc «, ,
r/Wiw, fMOni Sitn, jMfrf, mat, MffM, t ытнтия iMi-yft) (OeMiamfjH eMtfnvofinecma irevytttl
№wpyina W,)n,M3
Форнарование признака йыида IK ретин
Фиг.1
S
Обод Si
с дат чина
( $лад
Ла
Мет
V,
йа
Формироба ни е признана &ь/хоВа на
J
Вь/код J
Фи.5
) i
загрузка Fi б 3V1
б Вод Si с Гатчина.
Нет
Ла
RbiMflhOt CHue инвертора
Составитель В.Бунаков Редактор А.Козориз Техред М.Хода.нич Корректор В.Романенко
Заказ il65/54
Тираж 665
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. А/5
fnuH
У
Подписное
| Беркойич Е.И | |||
| и др | |||
| Тиристорные преобразователи повьппенной частоты для электротехнологических установок, Л.: Энергия, | |||
| Гребенчатая передача | 1916 |
|
SU1983A1 |
| Устройство для управления полупроводниковымпРЕОбРАзОВАТЕлЕМ чАСТОТы | 1979 |
|
SU830628A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
