1
Изобретение относится к автоматизации рабочих процессов землеройно-транспортных машин, а именно к устройствам для автоматического управления рабочим органом землеройно-транспортных машин в режиме максимума тяговой мощности.
Известно устройство для автоматического управления рабочим органом по различным параметрам землеройно-транспортных машин 1.
Это устройство не обеспечивает необходимой стабильности управления, полного использования потенциальных тяговых качеств колесного движителя, а также устойчивую работу машины с максимальной производительностью.
Известно устройство для автоматического управления рабочим органом землеройнотранспортной машины, включающее измерительные блоки силы тяги, теоретической и действительной скорости движения машины, трехпозиционный релейный элемент, связанныйс выходными каскадами выглубления и заглубления рабочего органа 2.
Однако эти устройства недостаточно надежны из-з-а большого количества узлов и при широком диапазоне изменения грунтовых условий не позволяют полностью использовать потенциальную тяговую мощность колесного движителя, а следовательно, постоянно обеспечивать максимальную производительность.
Цель изобретения - повышение надеж$ ности управления при работе в широком
диапазоне изменения грунтовых условий.
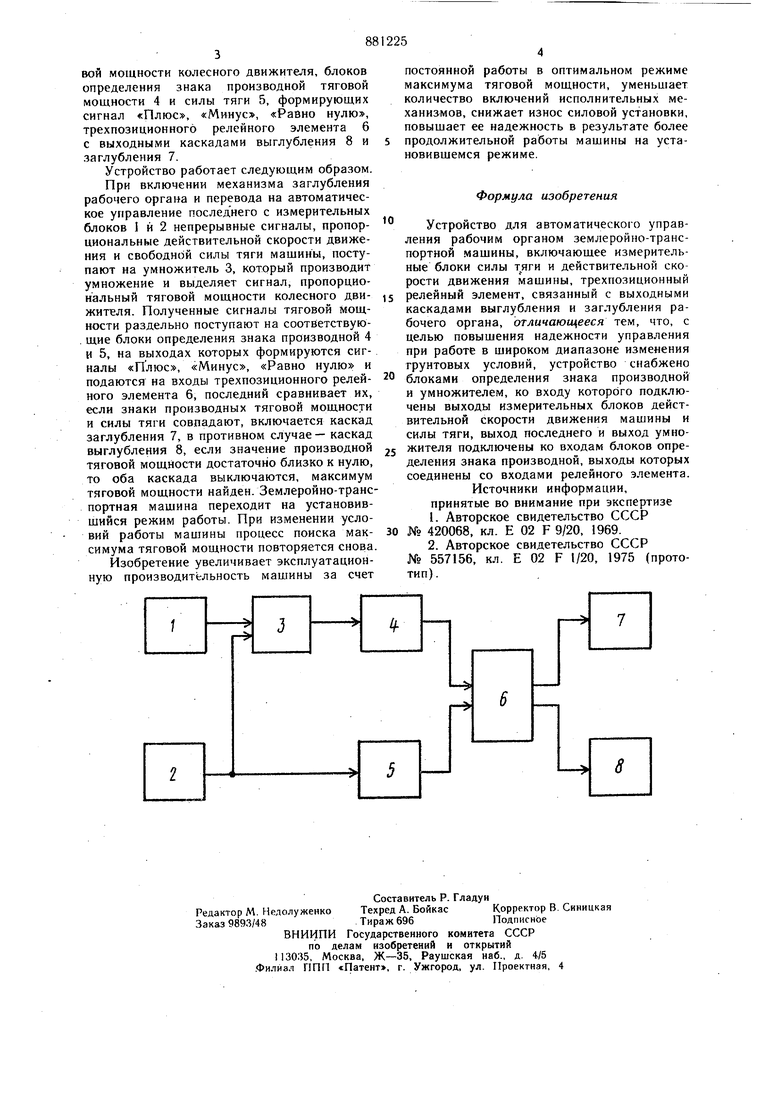
Цель достигается тем, что устройство сиабжено двумя блоками отфеделения знака производной и умножителем, ко входу которого подключены выходы измерительных блоков действительной скорости движения машины и силы тяги, выход последнего и выход умножителя подключены ко входам блоков определения знака пронзводной, выходы которых соединены со входамн лейного элемента.
На чертеже изображена блок-схема устройства.
Устройство для автоматического упрйвлення рабочим органом землеройно-транспортной машины состоит из измерительных 20 блоков действительной скорости движения 1 и силы тяги 2 машины, умножителя 3 измеряемых величин скорости и силы тягн, выделяющего сигнал, пропорциональный тяговой мощности колесного движнтеля, блоков определения знака производной тяговой мощности 4 и силы тяги 5, формирующих сигнал «Плюс, «Минус, «Равно нулю, трехпозиционного релейного элемента 6 с выходными каскадами выглубления 8 и заглубления 7.
Устройство работает следующим образом.
При включении механизма заглубления рабочего органа и перевода на автоматическое управление последнего с измерительных блоков 1 и 2 непрерывные сигналы, пропорциональные действительной скорости движения и свободной силы тяги мащины, поступают на умножитель 3, который производит умножение и выделяет сигнал, пропорциональный тяговой мощности колесного движителя. Полученные сигналы тяговой мощности раздельно поступают на соответствую. щие блоки определения знака производной 4 и 5, на выходах которых формируются сигналы «Плюс, «Минус, «Равно нулю и подаются на входы трехпозиционного релейного элемента 6, последний сравнивает их, если знаки производных тяговой мощности и силы тяги совпадают, включается каскад заглубления 7, в противном случае - каскад выглубления 8, если значение производной тяговой мощности достаточно близко к нулю, то оба каскада выключаются, максимум тяговой мощности найден. Землеройно-транспортная мащина переходит на установивщийся режим работы. При изменении условий работы машины процесс поиска максимума тяговой мощности повторяется снова.
Изобретение увеличивает эксплуатационную производительность мащины за счет
постоянной работы в оптимальном режиме максимума тяговой мощности, уменьшает количество включений исполнительных механизмов, снижает износ силовой установки, повыщает ее надежность в результате более продолжительной работы машины на установиБщемся режиме.
Формула изобретения
Устройство для автоматического управления рабочим органом землеройно-транспортной .мащины, включающее измерительные блоки силы т,яги и действительной скорости движения машины, трехпозиционный
релейный элемент, связанный с выходными каскадами выглубления и заглубления рабочего органа, отличающееся тем, что, с целью повыщения надежности управления при работе в широком диапазоне изменения грунтовых условий, устройство снабжено
блоками определения знака производной и умножителем, ко входу которого подключены выходы измерительных блоков действительной скорости движения машины и силы тяги, выход последнего и выход умножителя подключены ко входам блоков определения знака производной, выходы которых соединены со входами релейного элемента.
Источники информации, принятые во внимание при экспертизе
1.Авторское свидетельство СССР № 420068, кл. Е 02 F 9/20, 1969.
2.Авторское свидетельство СССР
№ 557156, кл. Е 02 F 1/20, 1975 (прототип).
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1980 |
|
SU994651A2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1320349A1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 2004 |
|
RU2291254C2 |
| СПОСОБ УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ | 1997 |
|
RU2131961C1 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ АВТОГРЕЙДЕРА | 2006 |
|
RU2327011C2 |
| СИСТЕМА АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ РАБОЧИМ ОРГАНОМ ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ В ПРОЦЕССЕ КОПАНИЯ ГРУНТА | 2006 |
|
RU2327010C2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1985 |
|
SU1271951A1 |
| Устройство для автоматического управления рабочим органом землеройнотранспортной машины | 1975 |
|
SU557156A1 |
| СПОСОБ УПРАВЛЕНИЯ ПРОЦЕССОМ КОПАНИЯ ГРУНТА ЗЕМЛЕРОЙНО-ТРАНСПОРТНОЙ МАШИНЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2002 |
|
RU2232234C2 |
| Устройство для автоматического управления рабочим органом землеройно-транспортной машины | 1988 |
|
SU1513091A1 |
