Изобретение относится к машиностроению и может быть использовано для измерения статических моментов рабочих лопаток роторов турбомашин.
Цель изобретения - повышепие точности и быстродействия за счет замены гиревой компенсации электрической.
На чертеже представлена структурная схема устройства.
Устройство содержит коромысло 1 с пере- |ходником 2 для установки лопатки 3 турбо- iManiHHbi и призмой 4 для контрольных гру- 1зов, основание 5 для установки коромысла : 1 посредством призматической опоры 6 и (опорной призмы 7, установленные на коромысле I контрольный валик 8, вторая приз- , ма 9 с подвеской 10 и набором гирь 11 и уравновешивающий груз 12, установленный с I возможностью фиксации, отсчетная линейка 13, рычаг 14, связанный с коромыслом : 1 серьгой 15 и установленный на основа- НИИ 5 посредством третьей призмы 16, из- , мерительный компенсатор 17, выполнен- I ный в виде постоянного магнита 18, закрепленного на основании 5 и связанного с рычагом 14 соленоида 19, последовательно соединенные измерительный преобразователь 20, связанный с рычагом 14 и основанием 5, усилитель 21, связанный с соленоидом 19, аналого-цифровой преобразователь 22 (АЦП), цифровой интегратор 23, арифметический блок 24 и цифровой индикатор 25, уравновешивающий компенсатор, выполненный в виде связанного с рычагом 14 секционного соленоида 26 на постоянном магните 18, блок 27 диапазонного уравновешивания, выполненный в виде набора 28 регулируемых резисторов, набора 29 ключей, соединенной с последним схемы 30 управле- ния ключами и прецизионного стабилизатора 31 тока, соединенного через наборы 28 и 29 регулируемых резисторов и ключей с секционным соленоидом 26, последовательно соединенные циклический счетчик 32, прямой и обратный входы которого соединены соответственно с выходами перегрузки и сброса АЦП 22, а второй выход - с вторым входом арифметического блока 24, и коммутатор 33, выход которого соединен с входом схемы 30 управления ключами, блок 34 управления и ручной переключатель 35, соединенные соответственно с вторым и третьим входами коммутатора, и регулируемый ограничитель 36.
Устройство для измерения статических моментов лопаток турбомашин работает еле- дующим образом.
Переходник 2 устанавливается на расчетный размер А по отсчетной линейке 13, передвижением уравновешивающего груза 12 уравновешивают систему коромысла 1 с рычагом 14, на блоке 34 управления включена кнопка «Измерения, на цифровом индикаторе 25 нулевое показание. Затем - осуществляют юстировку цены деления цифро
0
5
г з5 дс
50
55
30
40
вого индикатора 25, для чего на коромысло 1 устанавливают контрольный валик 8 известной массы и по значению создаваемого им момента устанавливают показания цифрового индикатора 25.
Осуществляют окончательную точную установку переходника 2 весовым способом.
Юстировку диапазонов уравновешивания осуществляют следующим образом.
Включают в блоке 34 у1 равления кнопку «Калибровка, при этом коммутатор 33 подключают к схеме 30 yпpaвлeпviя ключами ручкой ручного переключателя 35 диапазонов, который устанавливается в положение, соответствующее диапазону уравновешивания. На подвеске 10 с помощью ги|)ь 11 создается эталонный момент, равный соответствующему диапазону уравновешивания, при этом к прецизионному стабилизатору 31 тока подключается соответствующая секция секционного соленоида 26 и протекающий по ней ток уравновешивает эталонный момент, создаваемый гирями 11.
Величина неуравновешивания определяется по цифровому индикатору 25, которая доводится до нулевых показателей измерений сопротивления соответствующего регулируемого резистора из набора 28. Таким способом юстируют каждый диапазон уравновешивания.
Для измерения статического момента лопаток включается в блоке 34 управления кнопка «Измерение, при этом коммутатор 33 подключает циклический счетчик 32 к схеме 30 управления ключами, измеряемая лопатка 3 массой Р устанавливается в переходник 2 и под воздействием момета .P коромысло 1 и рычаг 14 отключаются от положения рановесия до ограничителя 36 на угол Aip , при этом на выходе измерительного преобразователя 20 появляется сигнал Vux, пропорциональный углу- отключения рычага 14, поступающий в усилитель 21. Усилитель 21 вырабатывает компенсационный ток IK, поступающий в измерительный соленоид 19, магнитное поле которого, взаимодействуя с полем постоянного магнита 18, создает усилие, компенсирующее отклонение рычага 14, и .вырабатывает сигнал для аналого-цифрового преобразователя 22.
Если измеряемый момент не превышает рабочий диапазон точного уравновешивания измерительным соленоидом 19, то с аналого-цифрового преобразователя 22 через цифровой интегратор 23 и арифметический блок 24 снимается на цифровой индикатор 25 сигнал, эквивалентный моменту.
Значение измеряемого момента регулируется младшими декадами цифрового индикатора 25.
Если значение измеряемого момента превышает рабочий диапазон точного уравновешивания, то на вуходе аналого-цифрового преобразователя 22 появляется сигнал
перегрузки «П, при этом циклический счетчик 32 переводится в очередное, болылее на единицу состояние, т.е. из нулевого исходного положения переходит в состояние, при котором в старшие разряды записывается «1, при этом по сигналу с цикли- ческого счетчика 32 схема 30 управления ключами подключает в блоке 27 диапазонного уравновешивания к прецизионному стабилизатору 31 тока первую секцию секционного соленоида 26, который создает урав- новешивающий момент первого диапазона уравновешивания. При этом измерительный соленоид 19 уравновешивает разницу между измеряемым моментом и моментом первого диапазона уравновешивания и если она окажется больше диапазона точного уравновешивания, то на выходе аналого- цифрового преобразователя будет опять перегруз «П и циклический счетчик 32 перейдет в очередное состояние, большее на единицу, при этом подключится следую- щая секция секционного соленоида 26 к прецизионному стабилизатору 31 тока и урав- новешиваюший момент увеличится на ступень диапазонного уравновешивания. Таким образом, включение ступеней диапазонного уравновешивания происходит автоматически, практически мгновенно, до тех пор пока не исчезнет перегруз «П на выходе аналого-цифрового преобразователя 22, что означает, что разница между измеряе.мым моментом и уравновешиваюшим меньше диапазо- на точного уравновешивания.
В арифметический блок 24 с выхода аналого-цифрового преобразователя 22 через цифровой интегратор 23 поступает сигнал, равный остаточному дисбалансу, нескомпенсированному уравновешивающим моментом, а с циклического счетчика 32 поступает код старших разрядов, равный диапазону уравновешивания и на выходе арифметического блока 24 на цифровом индикаторе 25 отображается истинное значение измеряемого момента.,
Если на границе диапазонного уравновешивания величина уравновешивания превышает рабочий диапазон точного уравновешивания, то на выходе аналого-цифрового преобразователя формируется сигнал «-, который переключает циклический счетчик 32 в режим вычитания, при этом циклический счетчик 32 переводится в положение, меньше на единицу, одновременно происходит подключение секций секционного соленоида с меньшим пределом уравновешивания. Умень- шение старших разрядов счетчика 32 происходит при одновременном подключении секций соленоида 26 с меньшим пределом уравновешивания до исчезновения с аналого-цифрового преобразователя 22 сигнала «-. Поэтому при снятии измеряемой лопат- ки 3 с переходника 2 устройство автоматически возвращается в исходное состояние, поскольку на выходе аналого-цифрового
5
0 0 о
5 0
п 5
преобразователя 22 появляется устойчивый сигнал «- и циклический счетчик 32 подает сигналы на схему 30 управления ключами о последовательном отключении всех секций секционного соленоида 26 от прецизионного стабилизатора 31- тока, после чего система коромысла 1 с рычагом 14 приходит в равновесие, т.е. на цифровом индикаторе 25 нулевые показания и устройство готово к следующему измерению. При исчезновении на выходе аналого-цифрового преобразователя сигнала перегруз «П добавления «1 в циклический счетчик 32 прекращается. Если при этом произойдет перекомпенсация, например, на границе диапазонов уравно- вещивания и диапазона точного уравновешивания, на выходе аналого-цифрового преобразователя 22 возникает сигнал «--., который вернет через циклический счетчик 32 и схе.му 30 уг равле1 11я ключами систему диапазонного уравновешивания в иоложещ е «ниже на одну ступень.
По исчезновении на выходе аналого-цифрового преобразователя 22 сигналов « -- и «П в старших разрядах циклического счетчика 32 будет зафиксирован код, про- порциональйый номинальному значению уравновешивания момента на нижней границе данного диапазона.
Например, при измерении статического момента больше 400000 гсм, но меньше 500000 ГСМ в циклическом счетчике 32 в старших разрядах фиксируется «1, а к прецизионному стабилизатору 31 тока подключена четвертая секция секционного уравновешивающего соленоида 26, оставшуюся разницу в силовом воздействии измеряемого момента компенсирует система точного уравновешивания с соленоидом 19, цифровое значение кода которого оцифрованно аналого-цифровым преобразователем 22 и осредненное цифровым интегратором 23 поступает в арифметический блок 24, где алгебраически суммируется с кодом старших разрядов циклического счетчика 32, в результате на цифровой индикатор поступает число, отображающее действительное значение измеряемого момента.
Формула изобретения
Устройство для измерения статически.х моментов лопаток турбомашин, содержащее коромысло с переходником для установки лопаток, измерительный компенсатор, соединенный с соленоидом последнего рычаг, связанный с коромыслом, цифровой индикатор и последовательно соединенные усилитель и аналого-цифровой преобразователь, от.т- чающееся тем, что, с целью повыщеия точности и быстродействия, оно снабжено уравновешивающим компенсатором, секционныГ соленоид которого соединен с рычагом, блоком диапазонного уравновеи11:вания. BL-.IK). iHCHiiijiM в виде набо)а pei v. inpyeMbL.x
резисторов, набора клрочей, соединенной с
ними схемы управления ключами и препизиоииого стабилизатора тока, соедиисн Юго
через ключи и регулируемые резисторы
с секционным соленоидом уравновешиваюИ1.его комненсатора, нослед,овательно соеди:иенными цифровым интегратором, вход котоIporo соединен с выходом аналого-цифрового
Л1реобразователя, и арифметическим блоком,
которого соединен с цифровым ин
дикатором, циклическим счетчиком, прямой и обратный входы которого соединены соответственно с выходами перегрузки и сброса аналого-цифрового нреобразователя, а выход - с вторь м входом арифметического блока, блоком управления, ручным переключателем диапазонов и коммутатором, входы которого соединены с выходами блока управ- .ления, ручного переключателя диапазонов и циклического счетчика, а выход - со схемой управления ключами.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для измерения статического момента массы лопаток турбомашин | 1988 |
|
SU1608445A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1318799A1 |
| Автоматические весы | 1987 |
|
SU1441204A1 |
| Весоизмерительное устройство | 1980 |
|
SU870960A1 |
| Весоизмерительное устройство | 1984 |
|
SU1254305A1 |
| Устройство для определения моментного веса изделий | 1986 |
|
SU1339406A1 |
| Устройство для определения веса | 1985 |
|
SU1281911A1 |
| Способ компенсации температурной погрешности весов с гирной и силовой компенсацией | 1986 |
|
SU1446482A1 |
| Автоматические большегрузные весы | 1984 |
|
SU1200132A1 |
| Автоматическое весовое устройство | 1981 |
|
SU1064150A1 |
Изобретение относится к измерительной те.хнике и маи иностроению. Цель изобретения - повышение точности и быстродействия за счет замены г иревой комнен- сацни электрической. Компенсация осуществляется измерите.1ьным компенсатором 17, соленоид 19 которого через силпгель 21 связан с измерительным преобразователем 20. Сигнал с BTOpoi o вы.хода усилителя 21 через аналого-цифровой преобразователь 22, циклический счетчик 32 н коммутатор 33 подключает блок 27 диапазонного ypaeHOBeHJH- еания к еекцнонному соленоиду 26. ocyHiecT- вляюнхему дoнo.нитeль ivio комнеисацию 1 и.-. & (Л 8 3 о 4 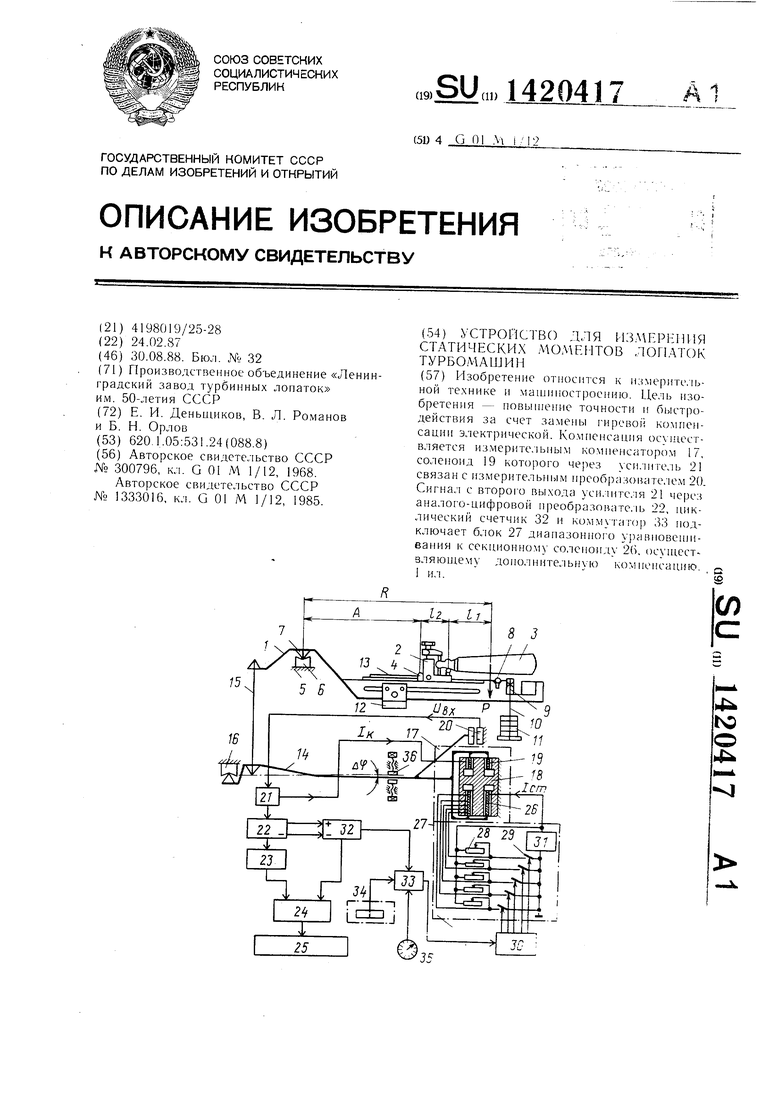
| УСТРОЙСТВО ДЛЯ ОПРЕДЕЛЕНИЯ СТАТИЧЕСКОГО МОМЕНТА ЛОПАТОК | 0 |
|
SU300796A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Авторское свидетельство СССР № 1333016, кл | |||
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
