Изобретение относится, к машиностроению, а именно к беззазврным приводам преимущественно для поворачиваемых узлов машин манипуляторол.
Цель изобретения - повьпцение точности позиционирования узлов - обеспечивается особенностями размещения устройства для торсионной затяжки, обеспечивающими упрощение регулировки торсионной затяжки.
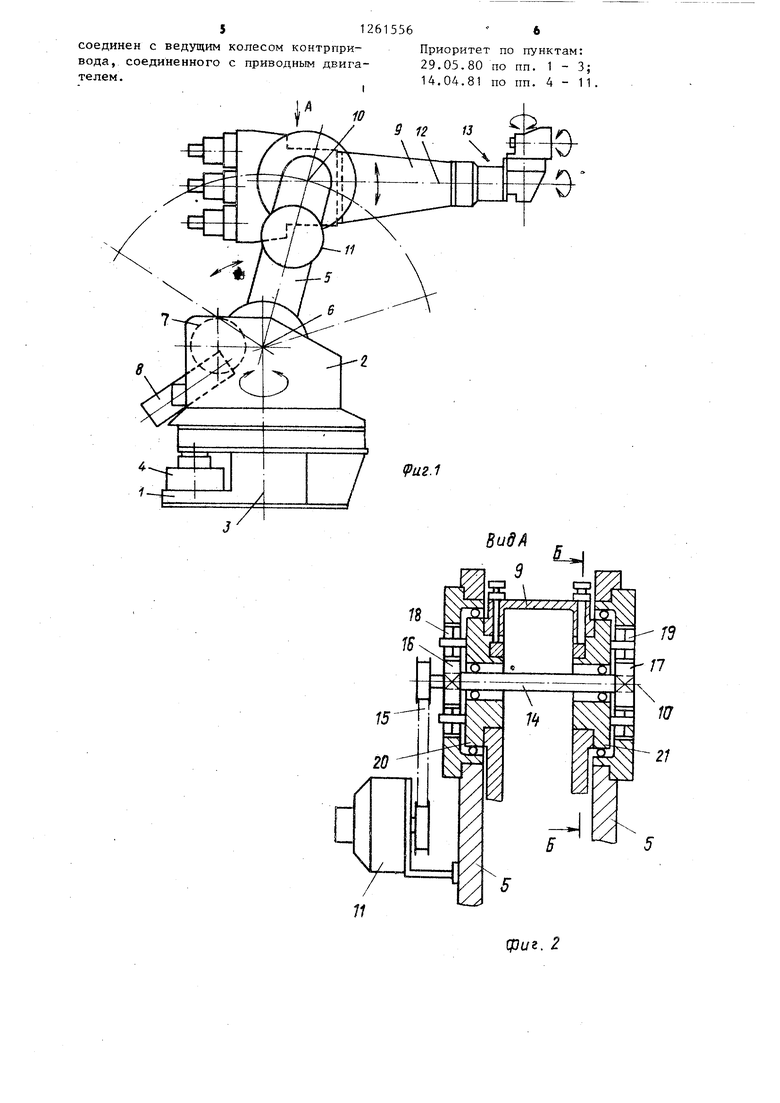
На фиг. 1 изображен манипулятор, общий вид; на фиг, 2 - вид А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 2; на фиг. 4 - основание манипулятора, вертикальный разрез; на фиг. 5 - привод, вариант выполнения; на фиг, 6 - торсионно-эластичный приводной вал, сечение; на фиг. 7 то же, вариант выполнения.
На жестком основании 1 расположена карусель 2, имеющая возможность поворота вокруг вертикальной оси
3посредством приводного двигателя
4в различных направлениях. На карусели 2 расположена приводная консоль 5, осциллирующий поворот которой вокруг оси 6 обеспечивается двигателем 7. Ось 6 поворота расположена горизонтально. Вес приводной консоли 5
и расположенных на ней элементов уравновешив.ается противовесом 8.
На свободном конце приводной консоли 5 расположена стрела 9, имеющая возможность поворота вокруг оси 10 посредством приводного двигателя 11. На стреле 9 размещена с возможностью поворота относительно оси 12 механическая рука 13, Которая может быть оборудована инструментом любого вида (не показан).
На фиг. 2 показан разрез беззазорного привода поворота стрелы 9 вокруг оси 10. Торсионно-эластичный приводной вал 14 связан с приводным двигателем 11 через контпривод 15, например зубчато-ременную передачу. На концах вала 14 расположены два ведущих колеса 16 и 17, которые через понижающие передачи 18 и 19 и ведомые колеса 20 и 21 передают вращение стреле 9.
Ведомые колеса 20 и 21 установлены на стреле 9 коаксиально оси 10 с возможностью вращения и связаны со стрелой устройством для торсионной затяжки. Последнее может бывь выполнено, например, в виде размещенных в поперепчых канавках 22
на торцах ступиц 23 ведомых колес 20 и 21 фиксаторов 24 с концами, выступающими над ступицами, и зажимных винтов 25 с контргайками 26. Винты 25 взаимодер ствуют с концами фиксаторов, а размещены на поворачиваемом узле.- стреле 9. Аналогичные устройства могут быть размещены и в других приводах поворота узлов манипулятора, в том числе и его руки 13. Например, на фиг. 4 изображен вариант привода поворота карусели 2. Поворот осуществляется приводным двигателем 4 через контрпривод 27. Фланец 28 карусели выполнен вилкообразным с перемычкой 29. Ведомые колес 30 и .31 привода размещены по одному на каждом плече вилки. В остальном привод может быть аналогичен описанному (фиг. 2 и, 3) . Ведущее колесо 32 контрпривода 15 может быть установлено в геометрической середине торсионно-эластичного приводного вала 14 (фиг. 5). Здесь под геометрической серединой вала 14 понижается та нейтральная зона вала, в которой одно предварительное торсионное зажимание переходит в другое, противоположно направленное. В зависимости от различных радиусов геометрическая середина не обязательно должна совпадать с серединой между ведущими колесами 16 и 17. Согласно фиг. 6 можно воздействовать на геометрическую середину приводного вала и тогда, когда контрпривод 27 лежит вне ведущих колес привода. В этом случае приводной вал выполнен составным из двух связанных в зоне геометрической середины одна с другой частей 33 и
34,последняя из которых выполнена полой и в ней размещен ведущий вал
35,связанный с ведущим колесом контрпривода. Полыми могут быть выполнены и обе части приводного вала. Главное, чтрбы они имели одинаковое поперечное сечение или одинаковую эластичность. Части приводного вала могут быть разъемнс связаны одна с
другой и с ведущим валом посредством фланцев (не показаны) или многозубчатого соединеяня 36. Ведущие колеса 16 и 17 с частями 33 и 34 приводного вала могут быть выполнены как единые детали (фиг. 7) при соблюдении равенства их торсионной эластичности.
Устройство работает следующим образом. 3 Включением двигателей 4 и 11 осу ществляется через контрпривод 15 ил 27 и беззазорньй привод поворот стр лы 9, консоли 5 и карусели 2. Имеющийся люфт Б приводе может привести к значительному отклонению поворачиваемого узла от заданного положения. Чтобы исключить такую ошибку позиционирования, люфты в при водах выбираются посредством устройств для торсионно-эластичной затяжки путем вЪаимного разворота ведо мых колес 20 и 21.Этот разворот осуществляется соответствующим перемеще нием винтов 25, воздействующих на концы фиксаторов 24, связанных со ступицами 23 ведомых колес. При развороте ведомые колеса через понижающие передачи 18 и 19, работающие в этом случае в обратном направлении как мультипликаторы, и ведущие колеса 16 и 17 скручивают (торсионно затягивают) приводной вал 14, чем обес печивается торсионно-эластичная затяжка привода и, соответственно, выборка зазоров в его сопряжениях.Причем регулировочные перемещения винтов 25 весьма малы, а углы скручивания приводного вала велики за счет размещения устройств для торсионноэластичной затяжки в конце кинематической цепи привода, что обеспечивает высокую его чувствительность к регулировкам. Формула изобретени 1. Беззазорный привод преимущест венно для поворачиваемых узлов машин манипуляторов, содержащий приводной двигатель, торсионно-эласти;чный приводной вал, на котором расположены на расстоянии одно от другого два ве дущих колеса, каждое из которых соед нено с одним ведомым колесом через понижающую передачу, и устройство для торсионной затяжки,а ведомые колеса расположены коаксиально приводному валу, отличающийся тем, что, с целью повышения точноети позиционирования узлов, устройство для торсионной затяжки предназначено для размещения между каждым ведомым колесом и поворачиваемым узлом а ведомые колеса предназначены для установки с возможностью вращения на поворачиваемом узле коаксиально оси его иошфота. .564 2.Привод по п. 1, о т л и ч аю щ и и с А тем, что на торце ступицы каждого ведомого колеса выполнена поперечная канавка, устройство для торсионной затяжки выполнено в виде размещенных в канавках фиксаторов с концами, выступающими над ступицами, и зажимных винтов с контргайками, взаимодействующих с концами фиксаторов и размещаемых на поворачиваемом узле. 3.Привод по п. 1, о т л и ч аю щ и и с я тем, что в случае вилкообразного выполнения поворачивае- .мого узла ведомые колеса предназначены для размещения по одному на каждом плече вилки. 4.Привод по пп. 1 , 2 и 3, о тличающий ся тем, что в геометрической середине торсионно-эластичного приводного вала установлено ведущее колесо контрпривода, соединенного с приводным .двигателем. 5.Привод по пп. 1, 2, 3 и 4. отличающий ся тем, что торсионно-эластичный приводноу вал в зоне геометрической середины разделен на связанные одна с другой части. 6. Привод по пп. 1,2,3,4 и 5, отличающийся тем, что он снабжен ведущим валом, а торсионно-эластичный приводной вал по крайней мере с одной стороны выполнен полым и в нем размещен и беззазорно связан с ним в зоне геометрической середины ведущий вал. 7.Привод по пп. 5 и 6, отличающийся тем, что части торсионно-эластичного приводного вала связаны одна с другой при помощи многозубчатого соединения. 8. Привод по пп. 5 и 6,о т л ичающийся тем, что части горсионного-эластичного приводного вала разъемно связаны одна с другой через фланцы. У. Привод по пп. 5,6,7 и 8, о тичающийся тем, что обе асти торсионно-эластичного приводного вала имеют одинаковое поперечое сечение. 10.Привод по п. 6, о т л и ч ащ и и с я тем, что торсионно-эласичный приводной вал установлен на едущем валу. 11.Привод по п. 6, о т л и ч ащ и и с я тем, что ведущий вал
51261556 6
соединен с ведущим колесом контрпри- Приоритет по пунктам: вода, соединенного с приводным двига- 29.05.80 по пп. 1 - 3;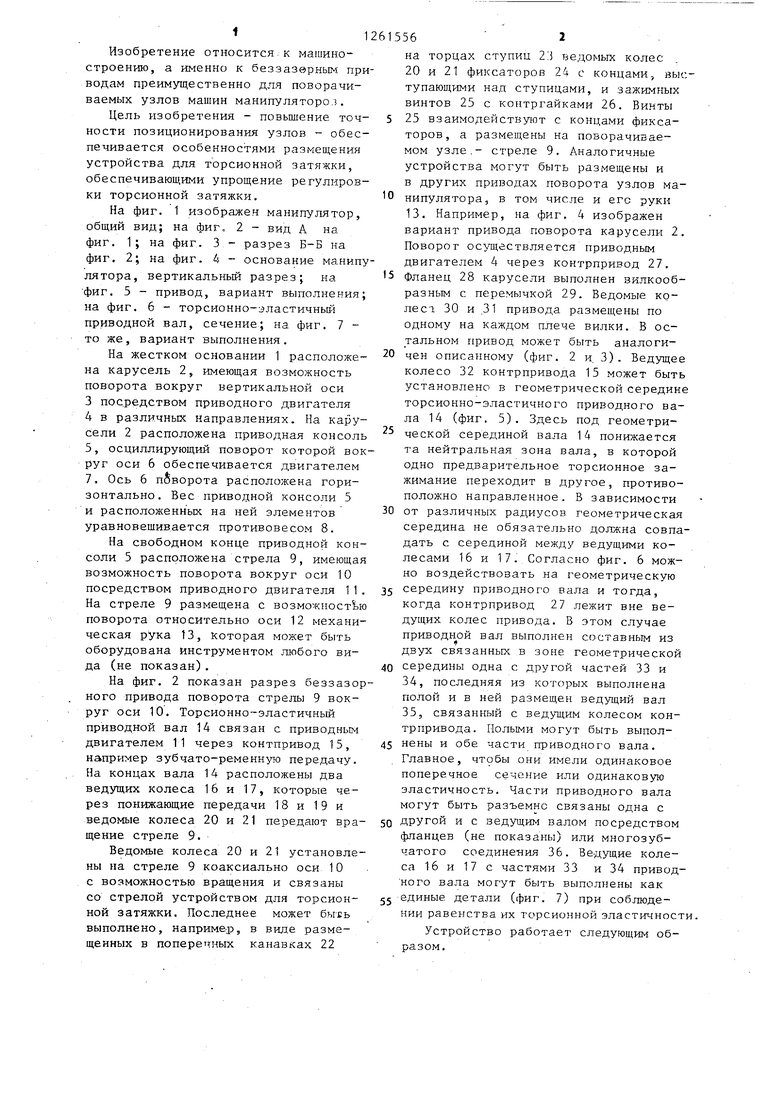

| название | год | авторы | номер документа |
|---|---|---|---|
| Беззазорный привод по меньшей мере для одной главной оси манипулятора | 1984 |
|
SU1567129A3 |
| Исполнительный орган манипулятора | 1980 |
|
SU1097187A3 |
| Передаточный механизм руки манипулятора | 1981 |
|
SU1153817A3 |
| Редукторная головка для манипуляторов | 1986 |
|
SU1421250A3 |
| Головка манипулятора | 1984 |
|
SU1362396A3 |
| Устройство для наружного крепления и направления питающих проводов перемещающихся инструментов манипуляторов | 1985 |
|
SU1309907A3 |
| Головка передачи для манипуляторов | 1986 |
|
SU1524801A3 |
| Способ шовной роликовой сварки деталей с криволинейным профилем и устройство для его осуществления | 1987 |
|
SU1544176A3 |
| Защитное устройство направляющих | 1986 |
|
SU1468407A3 |
| Автоматизированная поточная линия для сборки и сварки кузовов автомобилей | 1986 |
|
SU1609440A3 |


Изобретение относится к машино строению, в частности к беззазорным приводам преимущественно для поворачиваемых узлов машин манипуляторов. Цель изобретения - повьшение точности позиционирования узлов, что достигается размещением устройств для торсионной затяжки в конце кинематической цепи привода для уменьшения величины регулировочных перемещений и повышения чувствительности к регу- лировкам. Торсионно-эластичный приводной вал находится в начале кинематической цепи привода и связан с поворачиваемым узлом понижающей передачей через зубчатые колеса. Устройст-ва для торсионной затяжки расположены между поворачиваемым узлом.и последним - ведомым колесом привода. При регулировке торсионной затяжки приводного вала регулировочные перемещения многократно увеличиваются понижающей передачей, так как она в этом случае передает вращение в обратном направлении и работает как мульти1О пликатор. Таким образом, малое регусо лировочное перемещение обеспечивает с значительные углы затяжки приводного вала, повьщгая тем самым чувствительность привода к регулировкам и в конечном счете точность позиционирования узлов. 10 з.п. ф-лы, 7 ил. Oi сл СП а
г
И
{
(5Di/e. 2
11
3
| Привод для безлюфтового вращения платформы | 1977 |
|
SU727919A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
