4ib
ю
СП
1C
со
Изобретение относится к области робототехники и может быть испольэо вано при создании сборочных роботов.
Цель изобретения - улучшение динамических характеристик устройства . за счет повышения плавности отработки скачкообразного изменения усилия контакта собираемых деталей.
На чертеже представлена функцио- нальная схема устройства.
Устройство содержит задатчики 1 и 2 усилия и положения соответственно, первый и второй сумматоры 3 и 4, интегратор 5, нелинейный элемент 6, блок 7 умножения, блок 8 вьщеления модуля, усилитель 9, привод 10, исполнительный механизм 11, датчики 12 и 13 усилия и положения соответственно.
Устройство работает следующим образом.
Задатчики 1 и 2 усилия и положения формируют соответствующие сигналы текущего усилия сопряжения дё та- - лей и конечного положения исполнительного механизма 11. Статическая характеристика нелинейного элемента 6 с односторонней проводимостью и
насыщением имеет следующий вид:
и
Цц, если О Uj, UH)
«э
О, если UH 0 и, если и 7 UH 1 где U| э, и ц - сигналы на выходах нелинейного элемента 6 и интеграто- ра 5, Иц- максимальное значение сигнала на выходе нелинейного элемента 6, определяющееся максимально до пустимым коэффициентом усиления разомкнутой системы слежения по поло жению, который рассчитывается из условия обеспечения устойчивости системы.
Если при выполнении сопряжения деталей модуль сигнала с датчика 12 усилия равен сигналу с задатчика 1 усилия, т.е. |М ц(„| МЗДА, сигналы на выходе интегратора 5 Цц нелинейного элемента 6 Цц,, не изменяются и отработка перемещения происходит в соответствии с законом управления, форьшруемым усилителем 9, под действием сигнала ошибки системы по положению. Привод 10 под действием сигнала ошибки, поступакицего с выход сумматора 4 через блок 7 умножения и усилитель 9, перемещает исполнительный механизм 11. Если усилие взаимо
д
5 0
5
0
5 0
5 0 5
действия исполнительного органа с внешним объектом, например усилие сборки, становится больше заданного, т.е. М,| 7М5ЧД, то на выходе первого сумматора 3 появляется отрицательный сигнал, что приводит к уменьшению сигналов на выходах интегратора 5 и нелинейного элемента 6. Следовательно, уменьшаются сигналы на выходах блока 7 умножения и усилителя 9, что приводит к уменьшению скорости перемещения исполнительного механизма 11. Если сигнал на выходе интегратора 5 становится меньше или равен нулю (Цц 0), то в соответствии со статической характеристикой нелинейного элемента 6 сигнал U что приводит к остановке привода 10 и исполнительного механизма 11 до тех пор, пока сигнал с датчика 12 усилия не становится меньше сигнала задания МЗДАЕсли усилие взаимодействия исполнительного механизма 11 с внешним объектом становится меньше заданного, т.е. Mja , то на выходе первого сумматора 3 появляется положительный сигнал, что приводит к увеличению сигналов на выходах интегратора 5, нелинейного элемента 6, блока 7 умножения и усилителя 9, и, следовательно, скорость, перемещения исполнительного механизма увеличивается .
i
Формулаизобретения
Устройство для управления сборочным роботом, содержащее интегратор, последовательно соединенные задатчик усилия и первый сумматор, а также последовательно подключенные задатчик наложения, второй сумматор, блок умножения, усилитель и привод, связанный через исполнительный механизм с датчиком усилия и датчиком положения, выход которого подключен к -второму входу второго сумматора, отличающееся тем, что, с целью улучшения динамических характеристик, оно содержит нелинейный элемент и блок выделения модуля, через который выход датчика усилия соединен с вторым входом первого сум- матора, подключенного выходом через интегратор к входу нелинейного элемента, выход которого соединен с вторым входом блока умножения.
IflunI
8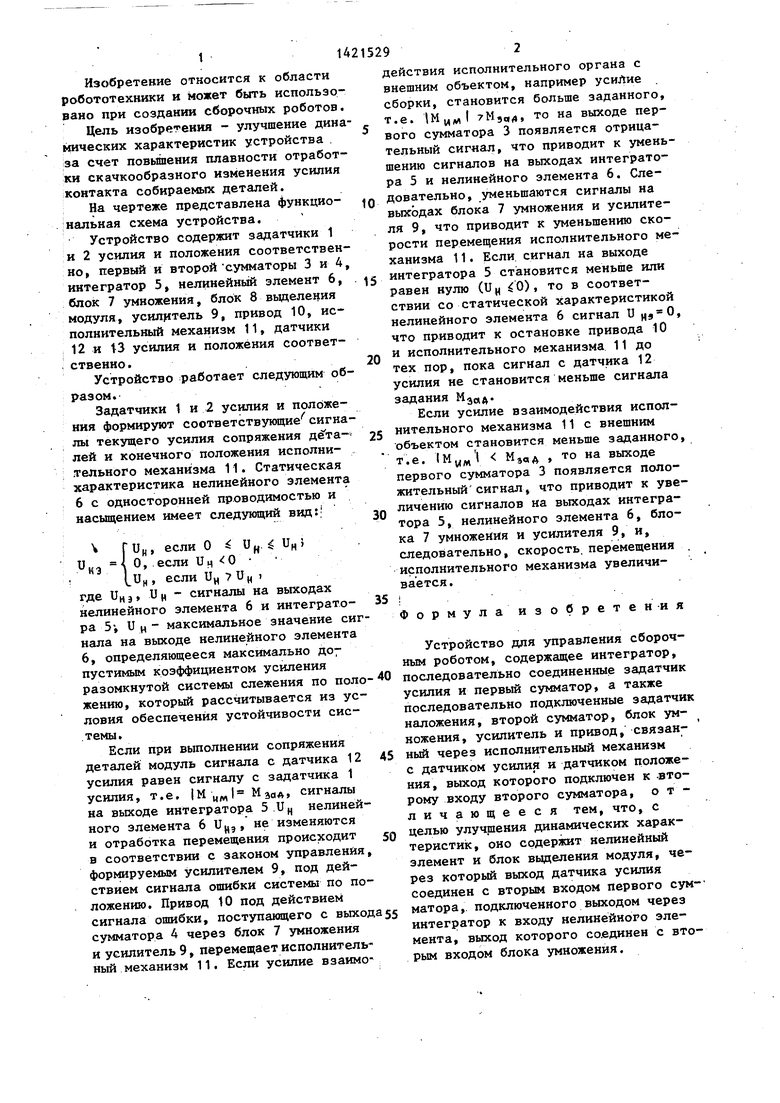
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1985 |
|
SU1321582A1 |
| Устройство для управления сборочным роботом | 1988 |
|
SU1650429A1 |
| Устройство для управления сборочным манипулятором | 1987 |
|
SU1495117A1 |
| Устройство для управления манипулятором | 1990 |
|
SU1717338A1 |
| Устройство для управления манипулятором | 1989 |
|
SU1668128A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2001 |
|
RU2209718C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ РОБОТОМ | 2003 |
|
RU2230654C1 |
| Самонастраивающаяся система с приводом на муфтах | 1987 |
|
SU1444712A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ДВИЖИТЕЛЕМ ПОДВОДНОГО РОБОТА | 2000 |
|
RU2191106C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ПОДВОДНЫМ РОБОТОМ | 2013 |
|
RU2523160C1 |

Изобретение относится к области. . робототехники и может быть использовано при создании сборочных роботов. Целью изобретения является улучшение динамических характеристик устрой- ства за счет повышения плавности обработки скачкообразного изменения усилия контакта собираемых деталей. Эта цель достигается тем, что 8 устройство, содержащее задатчики положения и усилия, датчикк положения и усилия, первый и второй сумматоры, интегратор, усилитель, привод и исполнительный механизм, дополнительно введены блок вьщеления модуля и нелинейный элемент. 1 ил.
| Системы очувствления и адаптивные промьшшенные роботы./Под ред | |||
| Е.П | |||
| Попова и В.Б | |||
| Клюева | |||
| - М.: Машиностроение, 1985, с | |||
| Автоматическая акустическая блокировка | 1921 |
|
SU205A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
