Изобретение относится к области робототехники и может быть использовано при создании сборочных роботов.
Целью изобретения является повышение быстродействия.
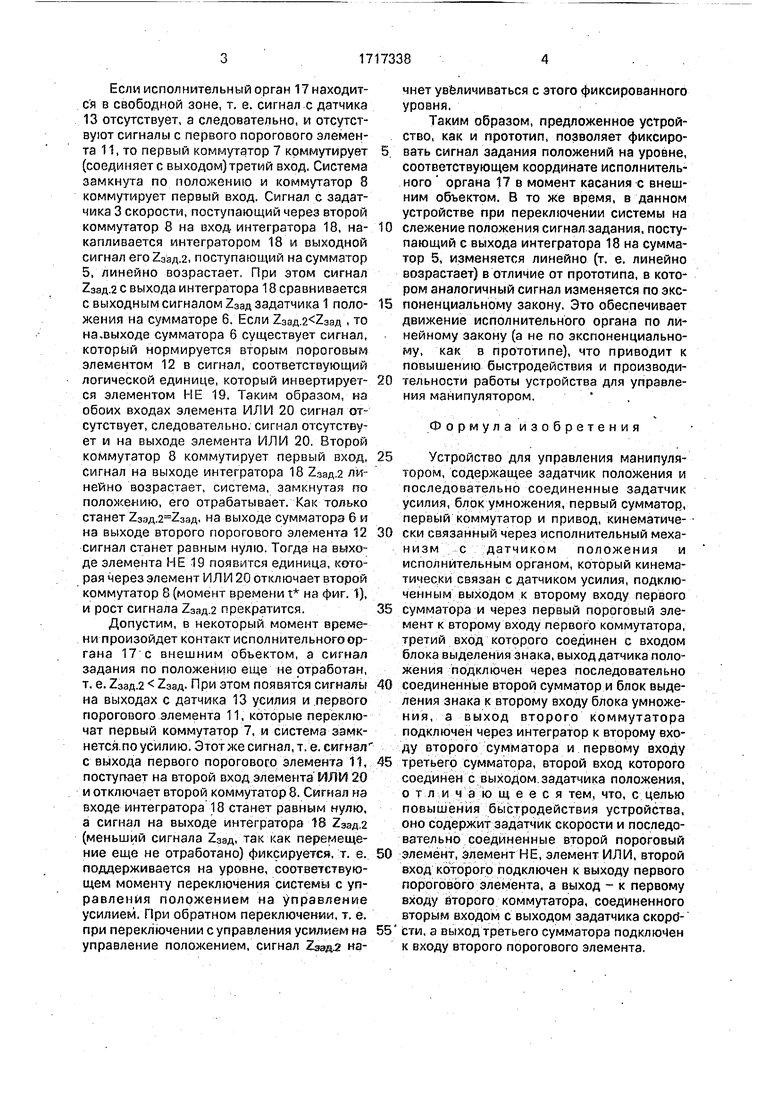
На фиг. 1 представлена диаграмма изменения управляющего сигнала; на фиг. 2- функциональная схема устройства.
На схеме указаны задатчики 1-3 положения, усилия и скорости соответственно, первый, второй и третий сумматоры 4-6 соответственно, первый и второй коммутаторы 7 и 8 соответственно, блок 9 выделения знака., блок 10 умножения, первый и второй пороговые элементы 11 и 12 соответственно, датчики 13 и 14 усилия и положения соответственно, привод 15, исполнительный механизм 16, исполнительный орган 17, интегратор 18, элемент НЕ 19 и элемент ИЛИ 20.
Устройство работает следующим образом.
Первый коммутатор 7 переключается сигналом, поступающим на второй вход. Если исполнительный орган 17 перемещается в свободной зоне, т. е. нет контакта с внешним объектом, то отсутствуют сигналы на выходах датчика 13 усилия и первого порогового элемента 11. Первый коммутатор 7 коммутирует (т. е. соединяет с выходом) третий вход. Система замкнута по положению. Сигналом задания системы является сигнал, поступающий на вход сумматора 5,73ад.2. При контакте исполнительного органа 17 с внешним объектом появляются сигналы на выходах датчика усилия 13 и первого порогового элемента 11. Первый коммутатор 7 переключается и теперь коммутирует первый вход. Система размыкается по положению и замыкается по усилию. Сигналом задания системы является сигнал, поступающий на вход первого сумматора 4 с выхода датчика 2 усилия, умноженный на +1 в зависимости от знака сигнала ошибки по положению.
Формирование сигнала задания 23ад.2 осуществляется следующим образом. Второй коммутатор 8 отключается (т. е. не коммутирует первый вход с выходом) в одном из двух случаев: когда сигнал 2зад.2 равен сиг- налу с выхода за датчика 1 положения 73ад или когда появляется сигнал на выходе первого порогового элемента 11, т. е. когда происходит контакт исполнительного органа 17 с внешним объектом.
X
N4 О)
Если исполнительный орган 17 находит- с я в свободной зоне, т. е. сигнал с датчика 13 отсутствует, а следовательно, и отсутствуют сигналы с первого порогового элемента 11, то первый коммутатор 7 коммутирует (соединяете выходом)третий вход, Система замкнута по положению и коммутатор 8 коммутирует первый вход. Сигнал с задат- чика 3 скорости, поступающий через второй коммутатор 8 на вход, интегратора 18, накапливается интегратором 18 и выходной сигнал его г3ад.2, поступающий на сумматор 5, линейно возрастает. При этом сигнал Zзaд.2 с выхода интегратора 18 сравнивается с выходным сигналом 2зад задатчика 1 положения на сумматоре 6. Если 7зад. , то на,выходе сумматора 6 существует сигнал, который нормируется вторым пороговым элементом 12 в сигнал, соответствующий логической единице, который инвертируется элементом НЕ 19. Таким образом, на обоих входах элемента ИЛИ 20 сигнал отсутствует, следовательно, сигнал отсутствует и на выходе элемента ИЛИ 20. Второй коммутатор 8 коммутирует первый вход, сигнал на выходе интегратора 18 Z3ap,.2 линейно возрастает, система, замкнутая по положению, его отрабатывает. Как только станет 2ззд.. на выходе сумматора 6 и на выходе второго порогового элемента 12 сигнал станет равным нулю/Тогда на выходе элемента НЕ 19 появится единица, которая через элемент ИЛИ 20 отключает второй коммутатор 8 (момент времени t на фиг. 1), и рост сигнала 23ад.2 прекратится.
Допустим, в некоторый момент времени произойдет контакт исполнительного органа 17:с внешним объектом, а сигнал задания по положению еще не отработан, т. е. 7зад.2 ZaaA. При этом появятся сигналы на выходах с датчика 13 усилия и .первого порогового элемента 11, которые переключат первый коммутатор 7, и система замк- нется.по усилию. Этот же сигнал, т.е. сигнал с выхода первого порогового элемента 11, поступает на второй вход элемента ИЛИ 20 и отключает второй коммутатор В. Сигнал на входе интегратора 18 станет равным нулю, а сигнал на выходе интегратора 18 23ад.2 (меньший сигнала Z3aA, так как перемещение еще не отработано) фиксируется, т. е. поддерживается на уровне, соответствующем моменту переключения системы с управления положением на управление усилием. При обратном переключении, т. е. при переключении с управления усилием на управление положением, сигнал 2ээд.з начнет увеличиваться с этого фиксированного уровня.
Таким образом, предложенное устройство, как и прототип, позволяет фиксировать сигнал задания положений на уровне, соответствующем координате исполнительного органа 17 в момент касания с внешним объектом. В то же время, в данном устройстве при переключении системы на
слежение положения сигнал задания, поступающий с выхода интегратора 18 на сумматор 5, изменяется линейно (т. е. линейно возрастает) в отличие от прототипа, в котором аналогичный сигнал изменяется по экспонен циал ьнрму закону. Это обеспечивает движение исполнительного органа по линейному закону (а не по экспоненциальному, как в прототипе), что приводит к повышению быстродействия и производительности работы устройства для управления манипулятором. ,
. Формула изобретения
Устройство для управления манипулятором, содержащее задатчик положения и последовательно соединенные задатчик усилия, блок умножения, первый сумматор, первый коммутатор и привод, кинематически связанный через исполнительный механизм с датчиком положения и исполнительным органом, который кинематически связан с датчиком усилия, подключенным выходом к второму входу первого
сумматора и через первый пороговый элемент к второму входу первого коммутатора, третий вход которого соединен с входом блока выделения знака, выход датчика положения подключен через последовательно
соединенные второй сумматор и блок выделения знака к второму входу блока умножения, а выход второго коммутатора подключен через интегратор к второму входу второго сумматора и первому входу
третьего сумматора, второй вход которого соединен с выходом, задатчика положения, о т л и чаю щ е е с я тем, что, с целью повышения быстродействия устройства, оно содержит задатчик скорости и последовательно соединенные второй пороговый
элемент, элемент НЕ, элемент ИЛИ, второй вход которого подключен к выходу первого порогового элемента, а выход - к первому входу второго коммутатора, соединенного вторым входом с выходом задатчика CKOpd сти, а выход третьего сумматора подключен к входу второго порогового элемента.
Z(t)
т
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1985 |
|
SU1321582A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1290247A1 |
| Устройство для регулирования толщины проката | 1980 |
|
SU865459A1 |
| Устройство для управления копирующим манипулятором | 1984 |
|
SU1234807A1 |
| СПОСОБ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ ДОЗАТОРА ТОПЛИВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2285140C2 |
| Устройство для автоматического управления дизель-генераторной установкой тепловоза | 1988 |
|
SU1564017A1 |
| Система управления наведением инерционного объекта | 2022 |
|
RU2795844C1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1421529A1 |
| Устройство для управления приводом манипулятора | 1990 |
|
SU1821356A1 |
| Устройство для дистанционной передачи угла с масштабированием усилий | 1986 |
|
SU1817201A1 |
Устройство относится к области робототехники и может быть использовано при со- здании сборочных роботов. Ц«лью изобретения является повышение быстродействия за счет обеспечения линейного за- кона управления положением исполнительного органа. Для этого в устройство введены задатчик скорости, второй пороговый элемент, элемент НЕ и элемент ИЛИ. 2 ил.
./
«#
