1
Изобретение относится к роботот нике и может быть использовано при создании сборочных роботов.
Цель изобретения - расширение функциональных возможностей устрой ва за счет обеспечения плавности перемещения исполнительного органа при переходе из режима работы в котакте с внешним объектом на работу в свободной зоне.
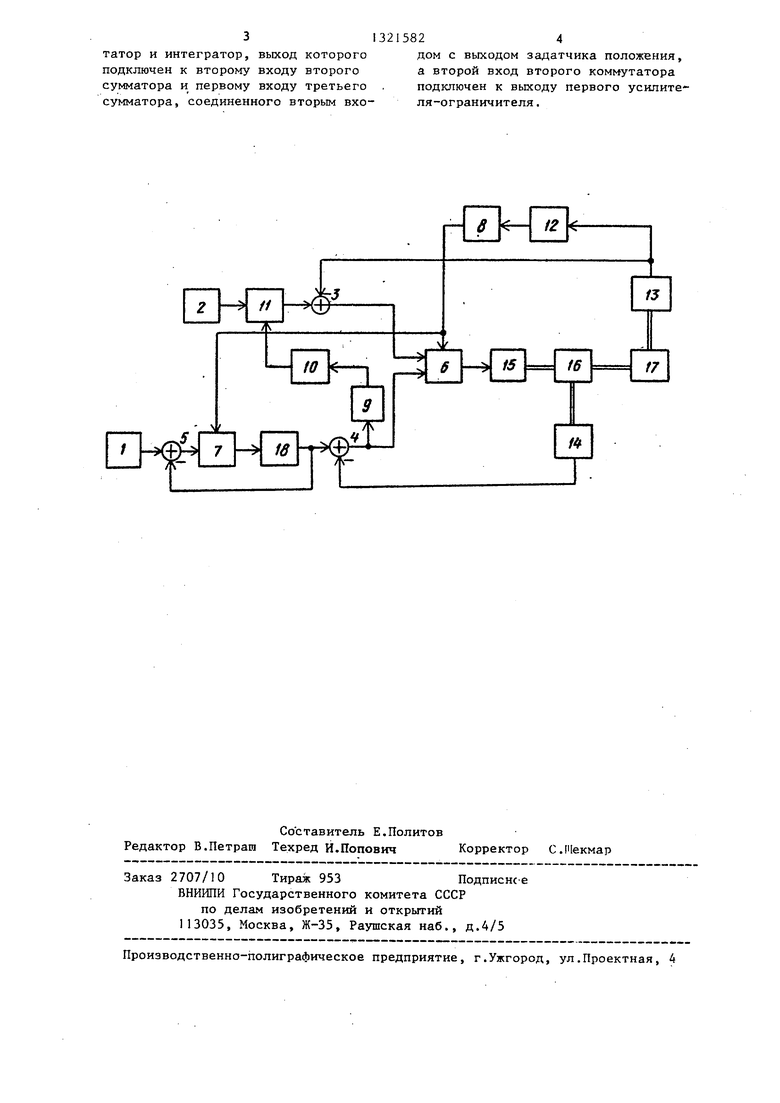
На чертеже представлена функциональная схема устройства.
Устройство содержит задатчики 1 и 2 положения и усилия соответствено, первый 3, второй 4 и третий 5 сумматоры, первый 6 и второй 7 коммутаторы, первый 8 и второй 9 усилтели-ограничители, блок 0 вьщелен модуля, блок II умножения, пороговый элемент 12, датчики 13 и 14 услия и положения соответственно, првод 15, исполнительный механизм 16 исполнительный орган 17, интегратор 18.
Устройство работает следующим образом.
Сигнал задания по положению поступает с задатчика 1 на третий сумматор 5. Если исполнительный орган 17 находится в свободной зоне, т.е сигнал с датчика 13 усилия отсутст
ет, а следовательно, и отсутствуют сигналы с порогового элемента 12 и первого усилителя-ограничителя 8, то первый коммутатор 6 коммутирует (соединяет с выходом) третий вход. Система замкнута по положению, коммута - тор 7 коммутирует единственный вход. Сигнал ошибки рассогласования с выхода третьего сумматора 5 через второй коммутатор 7 и интегратор 18 поступает на сумматор 4. Форма этого сигнала близка к линейно возрастающей. Сигнал ошибки рассогласования по .положению поступает через первый коммутатор 6 на привод 15, который приводит в двшкение через исполнительный механизм 16 исполнительный орган 17.
При контакте исполнительного органа I 7 с внешним объектом на выходе датчика 13 усилия пояршяется сигнал, который через пороговый элемент 12 и первый усилитель-ограничитель 8 переключает первый 6 и второй 7 коммутаторы. Коммутатор 6 размыкает обратную связь по положению и замыкает обратную связь по усилию. КомO
5
мутатор
0
5
7 размыкает цепь, соединяющую выход сумматора 5 и вход интегратора 18. Сигнал задания положения фиксируется на уровне, соответствующем координате исполнительного органа 17 в момент касания с внешним объектом.
Когда вследствие перемещения исполнительного органа 17 по другим координатам прекращается контакт с внешним объектом, сигнал с датчика 13 усилия становится равным нулю, в результате чего комг-1утатор 6 переключается . Система замыкается по положению, коммутатор 7 коммутирует вход. На интегратор 18 поступает сигнал с третьего сумматора 5, сигнал задания положения начинает увеличиваться с у розня f соответствующего координате иснолнительного органа 17 в момент касания с внешним объектом, что обеспечивает плавность перемещения исполнительного органа 17 при переходе из контакта с внешним объектом на работу в свободной зоне.
Формула
изобретения
0
5
0
Устройство для управления манипулятором, содержащее задатчик положе - ния и последовательно соединенные задатчик усилия, блок умножения, первый сумматор, первый коммутатор и привод, кинематически связанный через исполнительный механизм с датчиком положения и исполнительным органом, связанным с датчиком усилия, подключенным выходом к второму входу первого сумматора и через последовательно соединенные пороговый элемент и первый усилитель-ограничитель - к , второму входу первого коммутатора, третий вход которого подключен к входу второго усилителя-ограничителя , а выход датчика положения подключен через последовательно соединенные второй сумматор, второй усилитель-ограничитель и блок вьщеления модуля к второму входу блока умножения, отличающееся тем, что, с целью расширения функциональных возможностей за счет обеспечения плавности перемещения исполнительного органа при переходе из режима 5 работы в контакте с внешним объектом на работу в свободной зоне, устройство содержит последовательно соединенные третий сумматор, второй комму5
0
313215824
татор и интегратор, выход которого дом с выходом задатчика положения, подключен к второму входу второго а второй вход второго коммутатора сумматора и первому входу третьего . подключен к выходу первого усилите- сумматора, соединенного вторым вхо- ля-ограничителя.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления манипулятором | 1990 |
|
SU1717338A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1290247A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1421529A1 |
| Система управления наведением инерционного объекта | 2022 |
|
RU2795844C1 |
| СПОСОБ УПРАВЛЕНИЯ ИСПОЛНИТЕЛЬНЫМ МЕХАНИЗМОМ ДОЗАТОРА ТОПЛИВА ГАЗОТУРБИННОГО ДВИГАТЕЛЯ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2004 |
|
RU2285140C2 |
| Резервированная система автоматического управления | 1982 |
|
SU1113778A1 |
| Устройство автоматического регулирования скорости подачи угледобывающей машины | 1980 |
|
SU928007A1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2014 |
|
RU2537256C1 |
| СИСТЕМА УПРАВЛЕНИЯ НАВЕДЕНИЕМ ИНЕРЦИОННОГО ОБЪЕКТА | 2002 |
|
RU2225633C1 |
| Устройство для управления манипулятором | 1983 |
|
SU1229719A1 |
Изобретение относится к области робототехники и может быть использо -: вано при создании сборочных роботов. Целью изобретения является расширение функциональных возможностей устройства за счет обеспечения плавности перемещения исполнительного органа при переходе из режима работы в контакте с внешним объектом на работу в свободной зоне. Устройство содержит задат- чики положения и усилия, сумматоры, коммутаторы, усилители-ограничители, датчики усилия и положения, пороговый элемент, блоки умножения и выделения модуля, интегратор, привод, исполнительный механизм и орган. 1 ил.
Составитель Е.Политов Редактор В.Петраш Техред И.Попович Корректор
Заказ 2707/10 Тираж 953Подписнс б
ВНИИПИ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д.4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
C.PIeKMap
| Устройство для управления сборочным манипулятором | 1980 |
|
SU930228A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1290247A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
