4ib Ч
11444712
Изобретение относится к автоматическому управлению и может быть использовано для управления электроприводами с нелинейными характеристиками j например электроприводами на гис- терезисных электромагнитных муфтах.
Целью изобретения является повьше- ние точности системы.
На чертеже изображена структурная -JQ схема самонастраивающейся системы с приводом на муфтах,
В соответствии со структурной схемой система содержит задатчик I, гулятор положения 2, регулятор ско- 5 рости 3, регулятор- тока 4, усилитель мощности 5, блок муфт 6 с установленными на Нем датчиком тока 7 и датчи- ком скорости 8, механизм 9 с датчиЗадатчик 1 вырабатывает сигнал за дания положения для механизма 9,срав ниваемый в регуляторе положения 2 с выходным сигналом датчика положения 10, Полученный таким образом сигнал ошибки по положению преобразуется ре гулятором положения 2 в задающий сигнал для регулятора скорости 3,который сравнивается в этом регуляторе с выходным сигналом датчика скорости 8. Выходной сигнал регулятора скорос ти 3 служит задающим для регулятора тока 4, на входе которого он сравнивается с выходным сигналом датчика тока 7. Выходной сигнал регулятора тока 4, проходя через усилитель мощности 5, поступает на обмотку управления первой или второй (в зависиком. положения 10, второй сумматор П, 20 мости от полярности сигнала) гисте- первый блок умножения 12, первый интегратор 13, третий сумматор 14, пер- вьй усилитель 15, первый ограничитель- ,ный элемент 16, второй усилитель 17, .второй ограничительный элемент 18, 25 первый 9 и второй 20 блоки вьщеле- ния модуля, второй блок .умножения 21, первый сумматор 22,. релейный э/ie- мент 23, второй интегратор 24 и четрезисной муфты блока муфт 6. Под дей ствием возникающего при этом момента зависящего (в соответствии с -регули ровочной характеристикой муфты) от тока, протекающего через о8мотку управления, соответствующая ведомая муфта приходит во вращение и через кинематическую пепь передает вращение механизму 9, По окончании переЗадатчик 1 вырабатывает сигнал задания положения для механизма 9,сравниваемый в регуляторе положения 2 с выходным сигналом датчика положения . 10, Полученный таким образом сигнал ошибки по положению преобразуется регулятором положения 2 в задающий сигнал для регулятора скорости 3,который сравнивается в этом регуляторе с выходным сигналом датчика скорости 8. Выходной сигнал регулятора скорости 3 служит задающим для регулятора тока 4, на входе которого он сравнивается с выходным сигналом датчика тока 7. Выходной сигнал регулятора тока 4, проходя через усилитель мощности 5, поступает на обмотку управления первой или второй (в зависимости от полярности сигнала) гисте-
резисной муфты блока муфт 6. Под действием возникающего при этом момента, зависящего (в соответствии с -регулировочной характеристикой муфты) от тока, протекающего через о8мотку управления, соответствующая ведомая муфта приходит во вращение и через кинематическую пепь передает вращение механизму 9, По окончании пере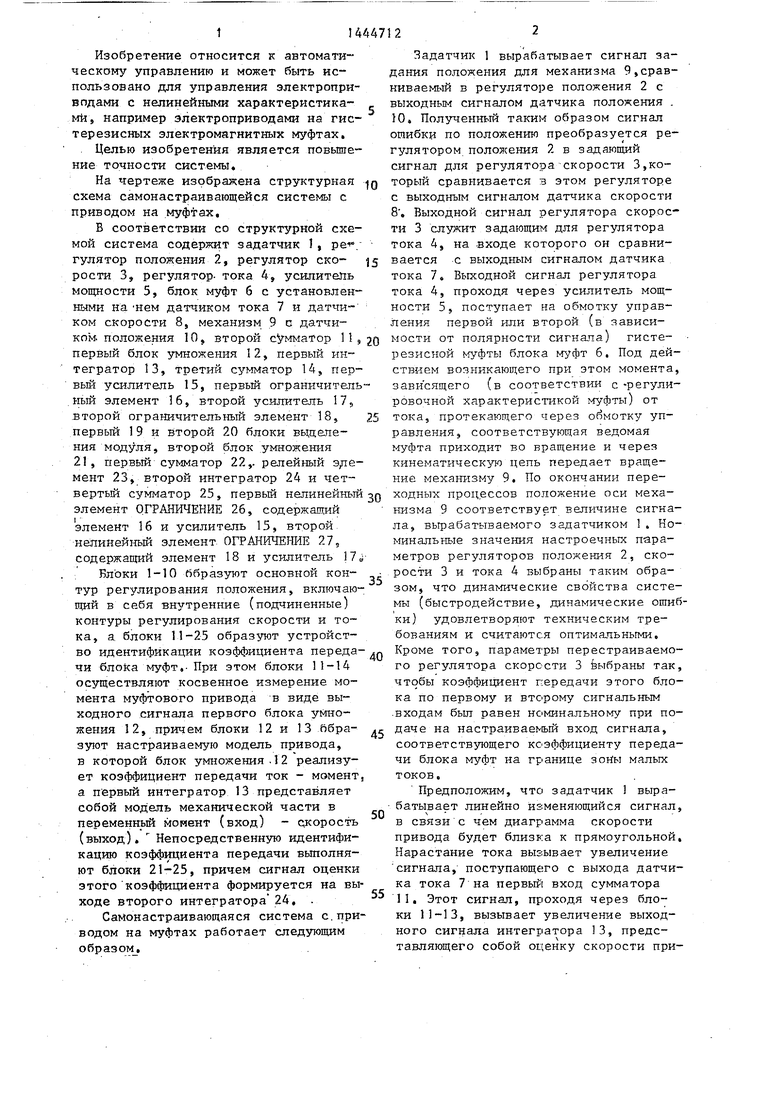

| название | год | авторы | номер документа |
|---|---|---|---|
| Самонастраивающаяся система управления | 1979 |
|
SU845143A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Самонастраивающаяся система управления | 1980 |
|
SU962852A2 |
| Самонастраивающаяся система управления | 1979 |
|
SU851339A1 |
| Самонастраивающийся регулятор | 1981 |
|
SU960731A1 |
| Самонастраивающаяся система управления | 1983 |
|
SU1158974A1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2015 |
|
RU2592036C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 1994 |
|
RU2060530C1 |
| САМОНАСТРАИВАЮЩИЙСЯ ЭЛЕКТРОПРИВОД | 2008 |
|
RU2397529C2 |
| Система управления объектом с упругими связями | 1980 |
|
SU941923A1 |

Изобретение относится к области автоматического управления и может быть использовано в электроприводах с нелинейными характеристиками, например в муфтовых электроприводах. Оно позволяет повысить точность системы, содержащей привод на муфтах и контуры регулирования положения, скорости и тока, а также четыре сумматора, два интегратора,блок умножения и релейный элемент, путем введения двутс нелинейных элементов ОГРАНИЧЕНИЕ, двух блоков вьщеления модуля и второго блока умножения. 1 ил. с О)
35
вертый сумматор 25, первый нелинейный Q ходных процессов положение оси меха- элемент ОГРАНИЧЕНИЕ 26, содержащий элемент 16 и усилитель 15, второй, нелинейный элемент ОГРАНИЧЕНИЕ 27, содержащий элемент 18 и усилитель 17.
Блоки 1-10 ббразуют основной контур регулирования положения, включающий в себя внутренние (подчиненные) контуры регулирования скорости и тока, а блоки 11-25 образуют устройство идентификации коэффициента переда- ,Q чи блока муфт,- При этом блоки 11-14 осуществляют косвенное измерение момента муфтового привода в виде выходного сигнала первого блока умножения 12, причем блоки 12 и 13 Образуют настраиваемую модель привода, в которой блок умножения . 12 реализует коэффициент передачи ток - момент, а первый интегратор 13 предста вляет собой мод;ель механической части в переменньй моиент (вход) - скорость (выход). Непосредственную идентификацию коэффициента передачи выполняют блоки 21-25, причем сигнал оценки этого коэффициента формируется на выходе второго интегратора 24, .
Самонастраивающаяся система с,приводом на муфтах работает следующим образом.
низма 9 соответствует величине сигнала, вырабатываемого задатчиком 1. Номинальные значения настроечных параметров регуляторов положения 2, скорости 3 и тока 4 выбраны таким образом, что динамические свойства системы (быстродействие, динамические ошиб ки) удовлетворяют техническим требованиям и считаются оптимальными. Кроме того, параметры перестраиваемого регулятора скорости 3 выбраны так, чтобы коэффициент передачи этого блока по первому и второму сигнальным .входам бьш равен номинальному при поде даче на настраиваемый вход сигнала, соответствующего коэффициенту передачи блока муфт на границе зоны малых токов.
Предположим, что задатчик 1 вырабатывает линейно изменяющийся сигнал, в связи с чем диаграмма скорости привода будет близка к прямоугольной. Нарастание тока вызывает увеличение сигнала,- поступающего с выхода датчика тока 7 на первьй вход сумматора П. Этот сигнал, проходя через блоки 11-13, вызывает увеличение выходного сигнала интегратора 13, представляющего собой оценку скорости при5
Q ходных процессов положение оси меха-
Q
низма 9 соответствует величине сигнала, вырабатываемого задатчиком 1. Номинальные значения настроечных параметров регуляторов положения 2, скорости 3 и тока 4 выбраны таким образом, что динамические свойства системы (быстродействие, динамические ошибки) удовлетворяют техническим требованиям и считаются оптимальными. Кроме того, параметры перестраиваемого регулятора скорости 3 выбраны так, чтобы коэффициент передачи этого блока по первому и второму сигнальным .входам бьш равен номинальному при пое даче на настраиваемый вход сигнала, соответствующего коэффициенту передачи блока муфт на границе зоны малых токов.
Предположим, что задатчик 1 вырабатывает линейно изменяющийся сигнал, в связи с чем диаграмма скорости привода будет близка к прямоугольной. Нарастание тока вызывает увеличение сигнала,- поступающего с выхода датчика тока 7 на первьй вход сумматора П. Этот сигнал, проходя через блоки 11-13, вызывает увеличение выходного сигнала интегратора 13, представляющего собой оценку скорости при31АА471
вода. В сумматоре 14 из этого сигил- ла вычитается выходной сигнал датчика скорости 8 (с одновременным усилением разности). Если коэффициент передачи блока умножения 12 по первому входу не вполне точно соответствует фактическому значению коэффициента передачи блока муфт (например, меньше его), то на выходе сумматора 14 Q появляется отрицательный сигнал ошибки. Этот сигнал, вычитаясь в сумматоре 11 из сигнала от датчика тока 7 и проходя далее черея блоки 11-13, дополнительно увеличивает выходной g сигнал интегратора 13 до тех пор,пока сигнал ошибки не станет равен нулю. При достаточно большом коэффи11и- енте усиления сумматора 14 по обоим входам и сумматора 11 по второму вхо- Q ду ошибка между выходными сигналами блоков 13 и 8 всегда близка к нулю. Следовательно, выходной сигнал интегратора 13, являющегося моделью механической части привода, отслеживает 25 значение скорости привода, а это означает, что выходной сигнал блока умножения 12 пропорционален моменту, передаваемому приводом.
В начале разгона привод работает зо при больших значениях тока, поэтому нелинейные элементы 26 и 27 входят в ограничение, т.е. на их выходах формируются постоянные сигналы, амплитуды которых определяются параметрами ограничительных элементов 16 и 18. Эти параметры выбираются таким образом, чтобы отношение уровней ограничения усилителей 17 и 15 было равно примерному значению коэффициента переда- Q чи блока муфт на границе зоны малых сигналов. Обозначим его как . Выходной сигнал усилителя 15, пройдя через блоки 19 и 21, вычитается в сумматоре 22 из выходного сигнала .усилителя 17, прошедшего через блок 20. Пусть выходной сигнал интегратора 24 равен небольшому положительному значению (например, за счет начальной установки), а выходной сиг- gg нал релейного элемента 23 - постоянному полотки т ель ному значению h (определяемому статической характеристикой блока 23), где . Тогда выходной сигнал блока 21 больше сигна- .-с
ээ ла блока 20 и на выходе сумматора
22 появляется отрицательньш сигнал, в результате чего выходной сигнал релейного элемента 23 принимает значе3S
5
о Q g с
э
S
24
ние - h. Но тогда выход сумматора 22 снова станет положителен, что заставит элемент 23 опять изменить свое состояние, и т.д. Таким образом, релейный элемент 23 начинает работать в скользящем режиме (реальное скольжение с частотой переключений, определяемой неидеальностью блоков 21 - 23,25), поддерживая выходной сигнал сумматора 22 близким к нулю. Это означает-, что среднее значение выходного сигнала сумматора 25 пропорционально Кгр. Так как этот сигнал представляет собой сумму выходного и входного сигналов интегратора 24, то выходной сигнал интегратора 24 стремится к значению Кгр по экспоненциальному закону, причем желаемая скорость сходимости может быть задана выбором коэффициента передачи интегратора 24. Поскольку выходной сигнал этого блока подается на входы блоков 3 и 12, то коэффициент передачи блока умножения 12 по первому входу равен , а коэффициент передачи регулятора скорости 3 в соответствии с указанным принципом выбора его настроечных параметров равен номинальному, что соответствует оптимальной динамике системы.
Завершение разгона привода сопровождается спаданием тока. При входе тока в зону малых сигналов выходные сигналы усилителей 15 и 17 выходят из ограничения и устройство идентификации вступает в работу. При изменении тока изображающая точка перемещается по регулировочной характеристике муфты, что воспринимается устройством идентификации как изменение ее коэффициента передачи. Поскольку устройство идентификации обладает небольшой инерционностью, то выходной сигнал интегратора 24 отслеживает некоторое усредненное значение коэффициента передачи. При этом все процессы идентификации происходят аналогично тому, как бьто описано выше. При равенстве тока нулю, контур, образованный блоками 21-23,25, размыкается. Чтобы избежать этого, достаточно при реализации блоков модуля 19 и 20 предусмотреть на их выходах небольшие смещения. В соот- ветбтвии с новым (меньшим) значением оценки К на выходе интегратора 24 коэффициент передачи регулятора скорости 3 увеличивается, так что кон-.
турный коэффициент передачи контура скорости остается примерно постоянным. Следовательно, динамические свойства этого контура (запас устойчивости, полоса пропускания) и системы в целом остаются неизменными.
Технические преимущества предлагаемой самонастраивающейся системы перед прототипом обусловлены отказом от использования в устройстве идентификации блока деления. При работе следящей системь с приводом на гисте- резисных муфтах с механизмами,обладающими малым моментом статических сопротивлений, например, при использовании их в антенных установках одной из основных проблем является воз - никновение незатухающих колебаний тока- и скорости привода в режиме малых токов. Однако именно при малых значениях тока в прототипе трудно получить достаточную точность работы, блока деления и системы в целом. Поэтому устранение в предлагаемой системе блока деления при сохранении эффекта самонастройки позволяет повысить точность системы.
Формула изобретения ЗО
25
Самонастраивающаяся система с приводом на муфтах, содержащая первый сумматор, последовательно соединенные задатчик, регулятор положения, регулятор скорости, регулятор тока, усилитель мощности, блок муфт с датчиком тока, подключенным выходом к второму входу регулятора тока, и датчиком скорости, подключенным выходом к второму входу регулятора скорости, и.механизм с датчиком положения, вы0
О
ход которого соединен с вторым входом регулятора положения, последовательно соединенные второй сумматор, первый вход которого подключен к выходу датчика тока, и первый блок умножения, последовательно соединенные первый интегратор и третий суйматор, второй вход которого подключен к выходу датчика скорости, последовательно соединенные релейный элемент и четвертый сумматор, и второй интегратор, выход которого подключен к второму входу первого блока умноже5 ния и к управляющему входу регулятора скорости, отличающаяся тем, что, с целью повышения точности системы, она допол1-гательно содержит последов ательно соединенные первый
0 нелинейный элемент ОГРАНИЧЕНИЕ, первый блок вьщеления модуля и второй блок умножения, последовательно соединенные второй нелинейный элемент ОГРАНИЧЕНИЕ и второй блок вьщеления
5 модули, подключенный выходом к первому входу первого сумматора , второй вход и выход которого соединены соответственно с выходом второго блока умножения и входом релейного элемента, соединенного выходом с входом второго интегратора, выход которого подключен к второму входу четвертого сумматора, подключенного выходок к второму входу второго блока умножения у выход третьего сумматора соединен с вторым входом второго сумматора, первый вход которого подключен к входу первого нелинейного элемента ОГРАНИЧЕНИЕ, вход второго нелинейно-
0 го элемента ОГРАНИЧЕНИЕ соединен с выходом первого блока умножения и входом первого интегратора.
5
| Гончаров В.В., Донской Н,В., Иванов А,Г | |||
| Тиристорныё электроприводы постоянного тока с интегральными микросхемами для станкостроения | |||
| Электроника, 1981, № 6, с | |||
| Прибор для промывания газов | 1922 |
|
SU20A1 |
| Самонастраивающаяся система управления | 1982 |
|
SU1071997A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
