Изобретение относится к робототехнике и может быть использовано при создании сборочных манипуляторов.
Целью изобретения является улучшение динамических характеристик устройства за счет исключения влияния ударного эффекта, возникающего в момент контакта сообщаемых деталей.
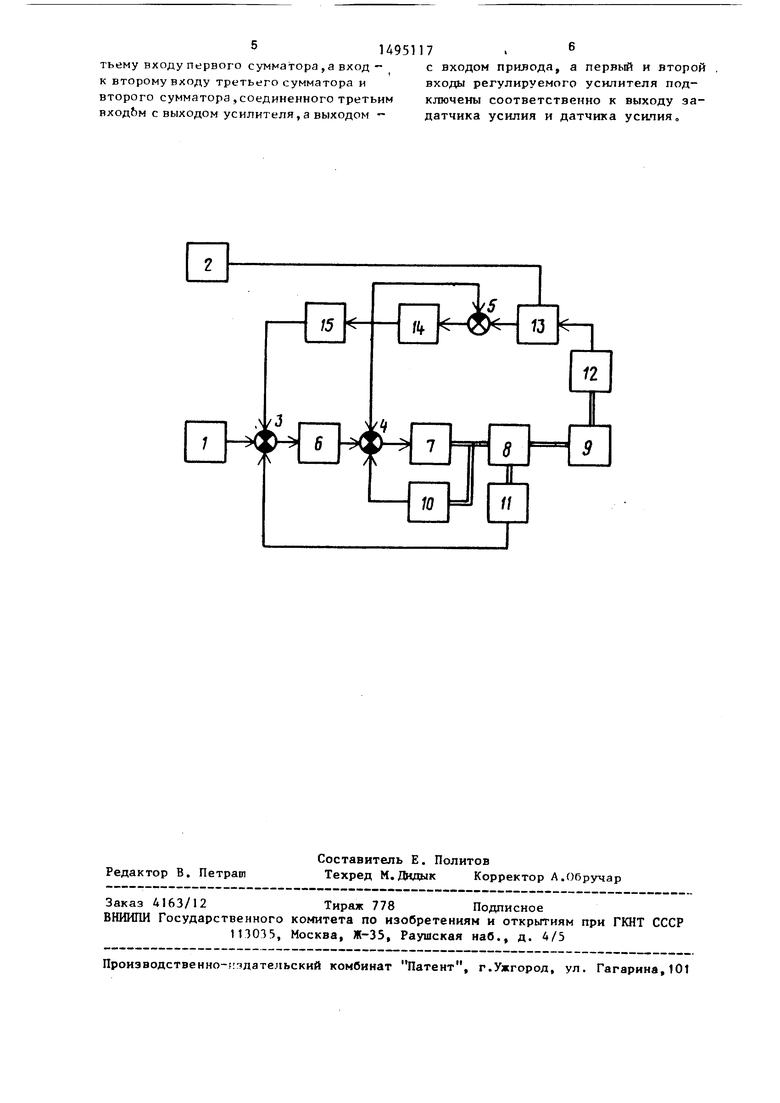
На чертеже представлена функтдао- нальная схема устройства.
Устройство содержит задатчики 1 и 2 положения и усилия соответственно, первый 3, второй 4 и третий 5 сумматоры, усилитель 6, привод 7, исполнительный механизм В, исполнительный орган 9, датчики 10 - 12 скорости, гтоложоиия и усилия COOT- ветстнрнно, ргт-улирусмый усилитель
13, первый 14 и второй 15 интеграторы.
Устройство работает следующим образом.
Задатчик 1 положения генерирует сигнал соответствующий величине перемещения исполнительного органа вдоль горизонтальной оси X, перпендикулярной оси сборки Z Данный сигнал соответствует координате исполнительного органа вдоль оси X на ПОЗИЦИИ сборки и совмещению осей собираемьтх деталей (вала и втулки) и через первый сумматор 3, усилитель 6 и второй сумматор 4 подается на привод 7, который через механизм 8 вызыя.-юг перемещение, ис- полнительно1-о ортакл Как только сигнал с дятчик.ч I I положения ста4;:
Х
сл
3 . 14 новится равным сигналу с выхода за- датчика 1 положения, привод 7 оста- навлинается,
Затем начинается перемещение ис- полнительного органа 9 вдоль вертикальной оси Z, Сборка не осуществляется, так как оси базовой детали (втулки) и детали в схвате (вала) не совпадают вследствие неточности перемещения по координате X ввиду ограниченной точности привода 7, погрешности расположения базовой детали (втулки), смещения детали (вала) в схвате и . Поэтому деталь в схвате упирается в фаску базовой детали, при этом возникает сила реакции связи и на выходе датчика 1 2 усилия появляется сигнал, при превьппении которым величины зоны нечувстви- тельности усилителя 13 (зона нечувствительности регулируется сигналом задатчика 2 усилия) поступает сигнал через третий сумматор 5 на первый интегратор 14о На выходе интег- ратора 14 появляется сигнал коррекции скорости привода о Величина этого сигнала пропорциональна интегралу от приращения сигнала об усилии &М, поступающего с датчика 12 усилия; i
UQ j uMdt. о
Указанный сигнал поступает на третий вход сумматора 4, подавая соот- ветствующий сигнал на привод 7, вы- его перемещение в направлении рассогласования осей деталей.
Одновременно сигнал с выхода первого интегратора поступает на второй интегратор 15, на выходе которого формируется сигнал коррекции величины пе)емещения
г
(i .
который поступает на третий вход первого сумматора 3. Этот сигнал способствует перемещению исполнительного органа 9 в направлении уменьшения рассогласования осей деталей Как только сигнал с датчика 12 усилия становится меньше величины зоны He4yBnTBHTejTbHocTH усилителя 13, сигнал на его выходе становится рав{тым нулю. Так как третий сумматор 5 и первый интегратор 14, охваченный отрицательной обратной связью, образуют апериодическое звено.
5 0 5 0
5
0
5
0
с
7
то на выходе первого интегратора 14 также устанавливается нулевой сигнал, поэтому сигнал на третий вход второго сумматора Д не подается и привод 7 останавливается,, При этом на выходе интегратора 15 сигнал коррекции, соответствующий новому положению исполнительного органа 9, сохраняется.
Устройство позволяет удерживать корректирующий сигнал положения на выходе интегратора 15 при отсутствии сигнала (или меньше неличины сигнала задания по усилию) с датчика 12 усилия в отличие от известного устройства, в котором сигнал коррекции положения пропадает при отсутствии сигнала с датчика 12 усилия, что вызывает рывки исполнительного органа 9о Кроме того, интеграторы 14 и 15 устройства выполняют сглаживающие функции, повышая динамические характеристики устройства,
8устройстве с выхода первого интегратора 14 дополнительно поступает сигнал коррекции скорости непосредственно на привод 7 через второй сумматор 4, что существенно повьпиа- ет быстродействие по сравнению с известным устройством,в котором сигнал коррекции один и поступает на вход первого сумматора 3, Тое на вход ьсего устройства, что замедляет осуществление коррекции.
Формула изобретения
Устройство для управления сборочным манипулятором, содержащее задат- чик усилия, привод, кинематически связанный с датчиком сХорости и через исполнительный механизм - с датчиком положения и исполнительным органом, который кинематически связан с датчиком усилия, последовательно соединенные задатчик положения, первый сумматор и усилитель, а также второй сумматор, переключенный первым входом к выходу датчика скорости, причем датчика положения соединен с вторым входом первого сумматора, отличающееся тем, что, с -целью улучшения динамических характеристик, оно содержит последовательно соединенные регулируемый усилитель, третий сумматор, первый интегратор и второй интегратор, выход которого подключен- к трек второму входу третьего сумматора и второго сумматора,соединенного третьим входЬм с выходом усилителя, а выходом входы регулируемого усилителя подключены соответственно к выходу эа- датчика усилия и датчика усилия.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления сборочным роботом | 1986 |
|
SU1315297A1 |
| Устройство для управления сборочным роботом | 1983 |
|
SU1091115A1 |
| Устройство для управления сборочным манипулятором | 1981 |
|
SU993198A1 |
| Устройство для управления манипулятором | 1985 |
|
SU1321582A1 |
| Устройство для управления сборочным роботом | 1986 |
|
SU1421529A1 |
| Устройство для управления сборочным манипулятором | 1980 |
|
SU930228A1 |
| Устройство для управления сборочным роботом | 1988 |
|
SU1650429A1 |
| Устройство для управления приводом манипулятора | 1989 |
|
SU1673433A1 |
| Устройство для управления манипулятором | 1990 |
|
SU1717338A1 |
| Устройство для управления манипулятором | 1983 |
|
SU1229719A1 |
Изобретение относится к робототехнике и может быть использовано при создании сборочных манипуляторов. Целью изобретения является улучшение динамических характеристик устройства. Для этого устройство содержит задатчики положения и усилия, три сумматора, усилитель, привод, связанный с датчиком скорости и через исполнительный механизм - с датчиком положения и исполнительным органом, который в свою очередь связан с датчиком усилия, два интегратора и регулируемый усилитель. Устройство позволяет исключить влияние ударного эффекта, возникающего в моменты контакта собираемых деталей. 1 ил.
| Устройство для управления сборочным роботом | 1983 |
|
SU1151924A1 |
| Системы очувствления и адаптивные промьгашенные роботы./ Под ред | |||
| Е.П.Попова, В.В.Клюева | |||
| -М,: Машиностроение, 1985, с | |||
| Автоматическая акустическая блокировка | 1921 |
|
SU205A1 |
