(21)4208436/31-11
(22)16.03.87
(46) 07.09.88. Бюл, № 33
(71)Белорусский политехнический институт
(72)П.В. Зеленый, Ф.Г. Цветик, А.И. Антоневич и В.Д. Пищало
(53)629.113.014.5(088.8)
(56) Авторское свидетельство СССР № 679433, кл. В 60 G 19/10, 1979.
(54)ВЕДУЩИЙ МОСТ ТРАНСПОРТНОГО СРЕДСТВА С САМОУСТАНАВЛИВАЩИМИСЯ КОЛЕСАМИ
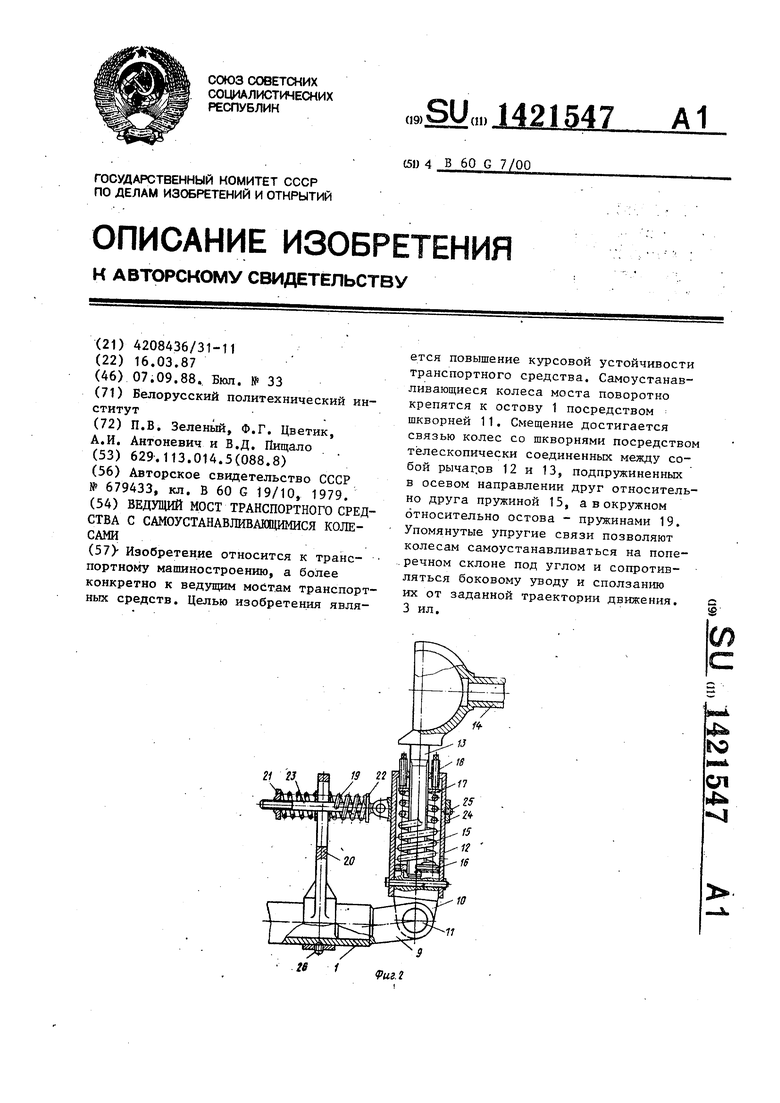
(57 Изобретение относится к транс- портному машиностроению, а более конкретно к ведущим мостам транспортных средств. Целью изобретения является повышение курсовой устойчивости транспортного средства. Самоустанавливающиеся колеса моста поворотно крепятся к остову 1 посредством шкворней 11. Смещение достигается связью колес со шкворнями посредством телескопически соединенньк между собой рычаг.ов 12 и 13, подпружиненных в осевом направлении друг относительно друга пружиной 15, а в окружном относительно остова - пружинами 19. Упомянутые упругие связи позволяют колесам самоустанавливаться на попе- .речном склоне под углом и сопротивляться боковому уводу и сползанию их от заданной траектории движения. 3 ил.
а S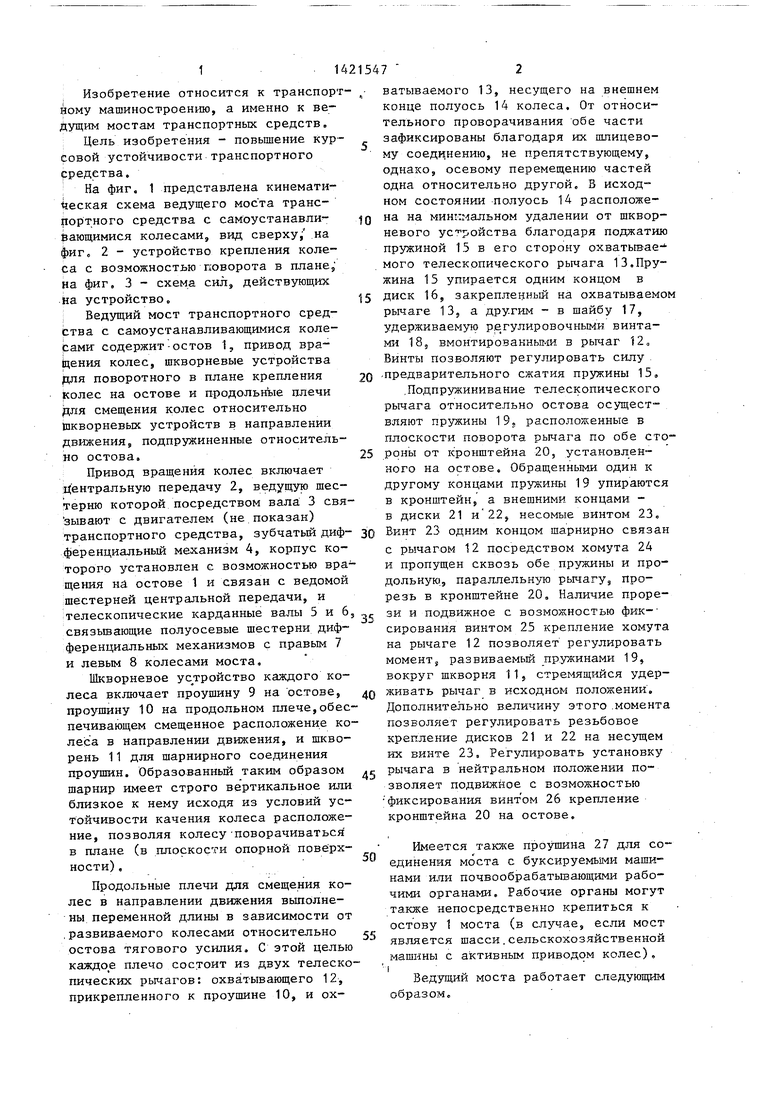
| название | год | авторы | номер документа |
|---|---|---|---|
| Ось транспортного средства с самоустанавливающимися колесами | 1982 |
|
SU1009869A1 |
| Пропашной трактор для работы на склонах | 1987 |
|
SU1518151A1 |
| Трактор для работы на склоне | 1989 |
|
SU1726289A1 |
| УСТРОЙСТВО ПРОДОЛЬНОЙ СВЯЗИ ДВУХОСНЫХ ТЕЛЕЖЕК С КУЗОВОМ ЖЕЛЕЗНОДОРОЖНОГО ТЯГОВОГО ТРАНСПОРТНОГО СРЕДСТВА | 2005 |
|
RU2276030C1 |
| Крутосклонный трактор со всеми управляемыми колесами | 1975 |
|
SU648461A1 |
| Ведущий мост транспортного средства для работы на склонах | 1978 |
|
SU982956A1 |
| ПОДВЕСКА КОЛЕСНОЙ БАЛКИ | 2003 |
|
RU2243103C1 |
| Стенд для диагностики рулевых приводов транспортных средств | 1989 |
|
SU1651133A1 |
| МОСТ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2077442C1 |
| АВТОБУС | 2003 |
|
RU2245812C1 |
21 23,
26 1
С
ю
ел
11
иг.2
Изобретение относится к транспорт- йому машиностроению, а именно к ведущим мостам транспортньк средств.
Цель изобретения - повьшение курсовой устойчивости транспортного средства,
; На фиг. 1 представлена кинемати- 1еская схема ведущего мос та транспортного средства с самоустанавли- бающимися колесами, вид сверху; на фиг, 2 - устройство крепления колеса с возможностью поворота в плане; на фиг, 3 - схема сил, действующих на устройство,
; Ведущий мост транспортного средства с самоустанавливающимися колерами содержит-остов 1, привод вра- Цения колес, шкворневые устройства рля поворотного в плане крепления ролес на остове и продольнъте плечи для смещения колес относительно Шкворневых устройств в направлении движения, подпружиненные относительно остова.
Привод вращения колес включает центральную передачу 2, ведущую шестерню которой посредством вала: 3 свя- зьшают с двигателем (не показан)
- ватываемого 13, несущего на внешнем конце полуось 14 колеса. От относительного проворачивания обе части зафиксированы благодаря их пшицево- му соединению, не препятствующему, однако, осевому перемещению частей одна относительно другой, В исходном состоянии полуось 14 расположеJQ на на минимальном удалении от шкворневого ус- ройства благодаря поджатию пружиной 15 в его сторону охватывае- , мого телескопического рычага 13,Пружина 15 упирается одним концом в
5 диск 16, закрепленный на охватываемом рычаге 13, а другим - в шайбу 17, удерживаемую ре гулировочными винтами 18, вмонтированньми в рьгааг 12, Винты позволяют регулировать силу .
20 -предварительного сжатия пружины 15, .Подпружинивание телескопического рычага относительно остова осуществляют пружины 19. расположенные в плоскости поворота рычага по обе сто25 РОНЫ от кронштейна 20, установленного на остове. Обращенными один к другому концами пружины 19 упираются в кронштейн, а внешними, концами - в диски 21 и 22, несомые винтом 23,
35
транспортного средства, зубчатьй диф- ЗО Винт 23 одним концом шарнирно связан ферендиальный механизм 4, корпус которого установлен с возможностью вращения на остове 1 и связан с ведомой шестерней центральной передачи, и телескопические карданные валы 5 и 6, связьшающие полуосевые шестерни дифференциальных механизмов с правым 7 и левым 8 колесами моста.
Шкворневое устройство каждого колеса включает проушину 9 на остове, проушину 10 на продольном плече,обеспечивающем смещенное расположение ко40
с рычагом 12 посредством хомута 24 и пропущен сквозь обе пружины и продольную., параллельную рычагу, прорезь в кронштейне 20, Наличие прорези и подвижное с возможностью фнк- сирования винтом 25 крепление хомута на рычаге 12 позволяет регулировать момент, развиваемый пр.ужинами 19, вокруг шкворня 11J стрег-1ящ1-шся удерживать рычаг в исходном положении . Дополнительно величину этого .момента позЕол;5ет регулировать резьбовое крепление дисков 21 и 22 на несущем их винте 23, Регулировать установку рычага в нейтральном положении позволяет подвижное с возможностью фиксирования винт ом 26 крепление кронштейна 20 на остове.
леса в направлении движения, и шкворень 11 для шарнирного соединения проушин. Образованный таким образом шарнир имеет строго вертикальное или близкое к нему исходя из условий устойчивости качения колеса расположение, позволяя колесу-поворачиваться в плане (в плоскости опорной поверхности) .
Продольные плечи для смещения колес в направлении движения выполнены переменной длины в зависимости от ,развиваемого колесами относительно остова тягового усилия. С этой целью каждо е плечо состоит из двух телескопических рычагов: охватывающего 12, прикрепленного к проушине 10, и охватываемого 13, несущего на внешнем конце полуось 14 колеса. От относительного проворачивания обе части зафиксированы благодаря их пшицево- му соединению, не препятствующему, однако, осевому перемещению частей одна относительно другой, В исходном состоянии полуось 14 расположена на минимальном удалении от шкворневого ус- ройства благодаря поджатию пружиной 15 в его сторону охватывае- мого телескопического рычага 13,Пружина 15 упирается одним концом в
диск 16, закрепленный на охватываемом рычаге 13, а другим - в шайбу 17, удерживаемую ре гулировочными винтами 18, вмонтированньми в рьгааг 12, Винты позволяют регулировать силу .
-предварительного сжатия пружины 15, .Подпружинивание телескопического рычага относительно остова осуществляют пружины 19. расположенные в плоскости поворота рычага по обе стоРОНЫ от кронштейна 20, установленного на остове. Обращенными один к другому концами пружины 19 упираются в кронштейн, а внешними, концами - в диски 21 и 22, несомые винтом 23,
5
О Винт 23 одним концом шарнирно связан
0
5
0
5
с рычагом 12 посредством хомута 24 и пропущен сквозь обе пружины и продольную., параллельную рычагу, прорезь в кронштейне 20, Наличие прорези и подвижное с возможностью фнк- сирования винтом 25 крепление хомута на рычаге 12 позволяет регулировать момент, развиваемый пр.ужинами 19, вокруг шкворня 11J стрег-1ящ1-шся удерживать рычаг в исходном положении . Дополнительно величину этого .момента позЕол;5ет регулировать резьбовое крепление дисков 21 и 22 на несущем их винте 23, Регулировать установку рычага в нейтральном положении позволяет подвижное с возможностью фиксирования винт ом 26 крепление кронштейна 20 на остове.
Имеется также проутпина 27 для соединения моста с буксируемьачи машинами или почвообрабатьюашщими рабочими органами. Рабочие органы могут также непосредственно крепиться к остову 1 моста (в случае, если мост является шасси.сельскохозяйственной
машины с активньм приводом колес), I
Вед ущий моста работает с.педующш4
образом.
При прямолинейном движении по ризонтальной поверхности на транс- . портное средство не действуют боковые силы, а колеса 7 и 8 моста не воспринимают боковые реакции опорной поверхности ввиду их отсутствия.Это позволяет пружинам 19 за счет сил упругости предварительного сжатия удерживать колеса 7 и 8 в исходном нейтральном положении. Поскольку продольные плоскости симметрии колес проходят через шкворни 11 их поворотного крепления, то развиваемые колесами касательные силы тяги не влияют на эти положения (фиг.1).
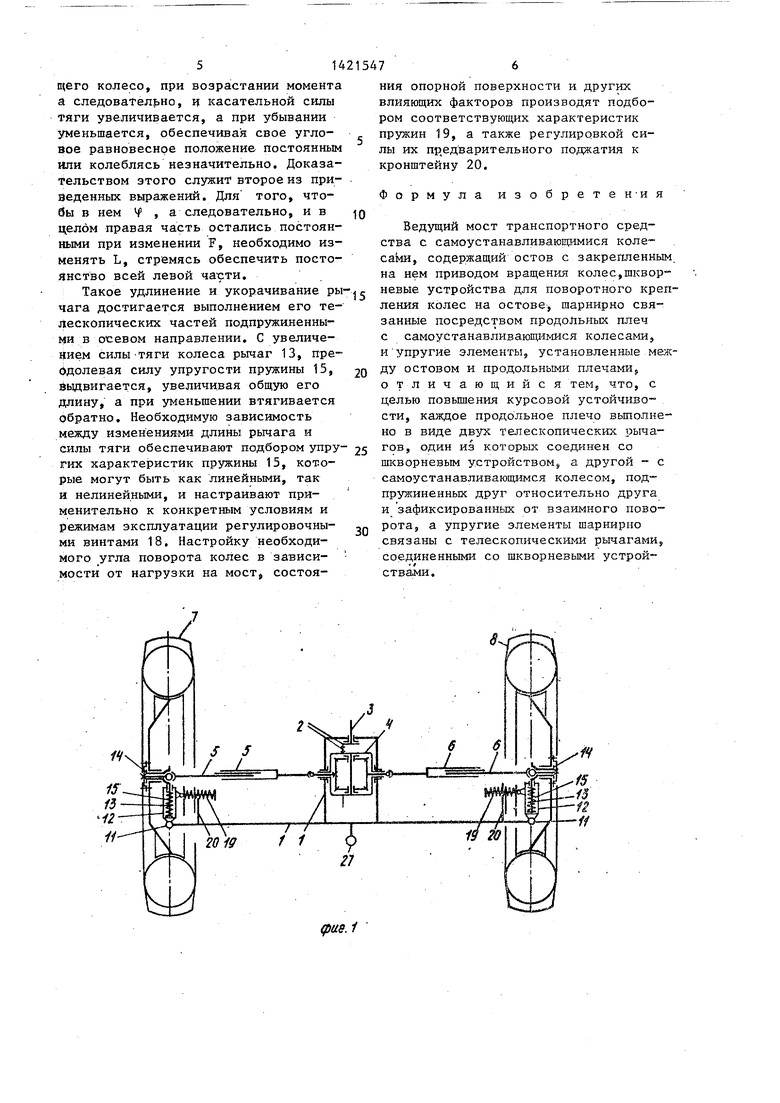
При выезде на поперечный склон остов 1 моста, а следовательно, и оба шкворня 11 накреняются к подно- жию склона. Приходящаяся на каждое из колес сила тяжести со стороны моста, ранее действовавшая только вдоль оси шкворня (на горизонтальной поверхности), при крене шкворня рас- кладьшается на осевую и боковую Р составляющие (фиг.З).
Уравновешиваются эти составляющие нормальной и боковой реакциями опор- ной поверхности, приложенными к колесу в пятне контакта. Нормальная реакция создает момент, стремящийся повернуть несущий колесо телескопический рычаг в плоскости расположения шкворня. Этот поворот невозможен, поскольку шкворень образует цилиндрический шарнир. Боковая реакция R создает момент, стремящийся повернуть телескопический рычаг вокруг шкворня 11.. Этому повороту сопротивляется сила Q упругости пружин 19, создавая MpMfeHT на рычаг в противоположном направлении. Помимо указанных сил, на рычаг действует касательная сила тяги, развиваемая колесом благодаря подводу к нему крутящего момента. Эта сила раскладьшается на
боковую составляющую (реакцию R опорной поверхности) и продольную составяющую F, совпадающую с направлением вижения колеса и моста в целом. Продольная составляющая F уравновешивается на шкворне силой Рд, передаваемой на мост и идущей на создание необходимого тягового усилия моста, затрачиваемого на преодоление сопротивления движению навешиваемых на мост рабочих органов или буксируемых ашин и орудий.
142 го
,
421547 и
10
15
20
25
30
35
40
45
50
55
Под действием указанных сил F, R Q продольный рычаг поворачивается и занимает некоторое равновесное положение, обеспечивающее равенство нулю суммы действующих на него в плане моментов
RLcos f FL sint/-Qa 0, где - угол поворота рычага в равновесном положении,
L - длина рычага,
а - плечо действия силы упругости пружин 19.
Положение рьтага в случае, если бы сила Q отсутствовала, изображено на фиг. 3 штриховой линией. При этом результирующая сил R и F, являющихся составляющими касательной силы тяги, развиваемой колесом, была бы направлена вдоль рычага.
Создаваемая пружинами 19 сила Q корректирует положение рычага (изображено сплошной линией). Описьюа- ющее его уравнение моментов может быть преобразовано к виду
L (RCOS V-FS in V) Qa.
Реакция R не зависит от положения рычага, так к ак определяется креном шкворня, и поэтому принимается постоянной. Постоянно и плечо а действия силы Q. Причем сила Q с увеличением угла f возрастает, а с умень- - шением - уменьшается. Сила F, являющаяся продольной составляющей касательной силы тяги колеса, - переменная .
Таким образом, в случае постоянства длины L рычага всякое возрастание касательной силы т.яги, а следовательно, и ее составляющей F неизменно приводило бы, как следует из полученного равенства, к уменьшению угла V , и наоборот, т.е. убьшание силы увеличивало бы угол (/ . Поскольку такой угол поворота имело бы и несомое рычагом колесо моста, колебания подводимого к колесу .крутящего момента, идущего на создание касательной силы тяги, вызывали бы и колебания параметров, характериззтощих курсовую устойчивость к олеса, моста и транспортного средства в целом. С возрастанием момента мост спблзал бы вниз по склону, с убьшанием, напротив, стремился бы вверх, разворачивая остов транспортного средства то в одном, то в другом направлении.
Однако этого не происходит благо- . даря тому, что длина L рычага, несу514
гцего колесо, при возрастании момента а следовательно, ч касательной силы тяги увеличивается, а при убывании уменьшается, обеспечивали свое угловое равновеснре положение постоянным или колеблясь незначительно. Доказательством этого служит второе из приведенных выражений. Для того, чтобы в нем V , а следовательно, и в делом правая часть остались постоянными при изменении F, необходимо изменять L, стремясь обеспечить постоянство всей левой части.
Такое удлинение и укорачивание невые устройства для поворотного креп20
чага достигается выполнением его телескопических частей подпружиненными в осевом направлении. С увеличением силы-тяги колеса рычаг 13, преодолевая силу упругости пружины 15, йьщвигается, увеличивая общую его длину, а при уменьшении втягивается Обратно. Необходимую зависимость между изменениями длины рычага и силы тяги обеспечивают подбором упру- 25 гик характеристик пружины 15, которые могут быть как линейными, так и нелинейными, и настраивают применительно к конкретным условиям и режимам эксплуатации регулировочными винтами 18. Настройку необходимого угла поворота колес в зависимости от нагрузки на мост, состоя30
ления колес на остове, шарнирно связанные посредством продольных плеч с самоустанавливающимися колесами, и упругие элементы, установленные между остовом и продольными плечами, отличающийся тем, что, с целью повышения курсовой устойчивости, каждое продольное плечо выполнено в виде двух телескопических рычагов, один из которых соединен со шкворневым устройством а другой - с самоустанавливающимся колесом, подпружиненных друг относительно друга и зафиксированных от взаимного поворота, а упругие элементы шарнирно связаны с телескопическими рычагами, соединенными со шкворневыми устройствами.
ния опорной поверхности и других влияющшс факторов производят подбором соответствующих характеристик пружин 19, а также регулировкой силы их пр,едварительного поджатия к кронштейну 20.
Формула изобрете Н И я
Ведущий мост транспортного средства с самоустанавливающимися коле- caiviH, содержащий остов с закрепленным
на нем приводом вращения колес,шквор
0
5
0
ления колес на остове, шарнирно связанные посредством продольных плеч с самоустанавливающимися колесами, и упругие элементы, установленные между остовом и продольными плечами, отличающийся тем, что, с целью повышения курсовой устойчивости, каждое продольное плечо выполнено в виде двух телескопических рычагов, один из которых соединен со шкворневым устройством а другой - с самоустанавливающимся колесом, подпружиненных друг относительно друга и зафиксированных от взаимного поворота, а упругие элементы шарнирно связаны с телескопическими рычагами, соединенными со шкворневыми устройствами.
п
