(Л
с
00
со
9
:д
(f}ual
I Изобретение относится к средствам механизации и автоматизации производ- с:твенных процессов, а именно к модулям степеней подвижности промьшшенных рюботов и манипуляторов, и может быть 1 спользовано в различных отраслях Г;ромыпшенности.
Целью изобретения является упро- йение технологии изготовления и повышение надежности работы.
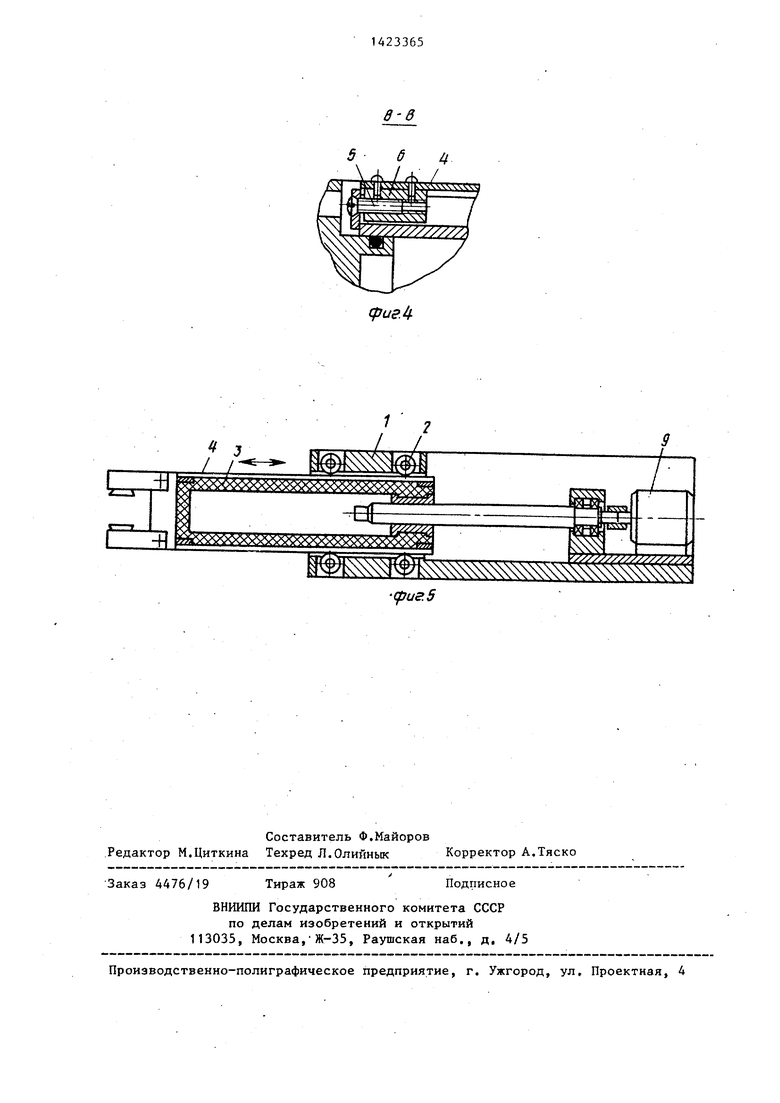
На фиг,1 показан модуль с пневмо- гЬийодом, разрез; на фиг.2 - разрез А-А на фиг,1; на фиг.З - разрез Б-Б на фиг.1; на фиг.4 - разрез В-В на фиг.З; на фиг.З - модуль с электроприводом, разрез.
Модуль промышленного робота содержит два аксиально расположенных кор- .пуса, первый 1 из которых связан с основанием и снабжен опорами 2 каче- H;faH, а второй 3 установлен своими .направляющими 4, выполненньми в виде стальных лент, на опорах 2 и снабжен п; иводом его линейного перемещения, например, пневматическим (фиг.1) или
При работе модуля происходит продольное перемещение корпуса 3 относительно корпуса 1, в результате чего натянутые на корпусе 3 ленты перемеща ются по опорам 2, Это перемещение происходит или при подаче рабочего тела под давлением в одну из полостей образованных в корпусе 3 по обе сто- 10 роны от поршня 8 в случае выполнения . привода пневматическим (фиг.1), или при включении электродвигателя 9, в случае выполнения привода электрическим с передачей винт - гайка 15 (фиг,5).
Формула изобретения
Модуль промьщшенного робота, со- 20 держащий два расположенных аксиально корпуса, первый из которых закреплен на основании и снабжен опорами качения, а второй снабжен приводом его линейного перемещения и направляющими, выполненными в виде стальных лент установленных на опорах качения первого корпуса, отличающийся тем, что, с целью упрощения технологии изготовления и повышения надеж25
электрическим (фиг.5). Стальные ленты 30 ности работы, он снабжен механизмами з 1креплены своими концами на втором корпусе 3 посредством натяжных мека- Н измов, каждый из которых выполнен в виде винта 5, опирающегося на торцовую поверхность корпуса 3, и навин-,c ч(нной на него втулки 6, жестко свя- с одним из концов ленты. На б())ковой поверхности втулки 6 установнатяжения лент, связывающими концы лент с вторым корпусом, каждый из которых выполнен в виде винта| опирающегося на торцовую поверхность второго корпуса, и навинченной на этот винт втулки с направляющими штифтами, расположенными на ее боковой поверх-ности и в пазах, выполненных во втором корпусе, при этом втулки жестко
натяжения лент, связывающими концы лент с вторым корпусом, каждый из торых выполнен в виде винта| опираю щегося на торцовую поверхность вто го корпуса, и навинченной на этот винт втулки с направляющими штифтам расположенными на ее боковой повер ности и в пазах, выполненных во вт ром корпусе, при этом втулки жестк
лфны штифты 7, расположенные в напр вляющем пазу, ;ля исключения ее по- Q связаны с соответствующими концами
вфрота. .лент.
При работе модуля происходит продольное перемещение корпуса 3 относительно корпуса 1, в результате чего натянутые на корпусе 3 ленты перемещаются по опорам 2, Это перемещение происходит или при подаче рабочего тела под давлением в одну из полостей, образованных в корпусе 3 по обе сто- роны от поршня 8 в случае выполнения привода пневматическим (фиг.1), или при включении электродвигателя 9, в случае выполнения привода электрическим с передачей винт - гайка (фиг,5).
Формула изобретения
Модуль промьщшенного робота, со- держащий два расположенных аксиально корпуса, первый из которых закреплен на основании и снабжен опорами качения, а второй снабжен приводом его линейного перемещения и направляющими, выполненными в виде стальных лент, установленных на опорах качения первого корпуса, отличающийся тем, что, с целью упрощения технологии изготовления и повышения надеж
ности работы, он снабжен механизмами
натяжения лент, связывающими концы лент с вторым корпусом, каждый из которых выполнен в виде винта| опирающегося на торцовую поверхность второго корпуса, и навинченной на этот винт втулки с направляющими штифтами, расположенными на ее боковой поверх- ности и в пазах, выполненных во втором корпусе, при этом втулки жестко
связаны с соответствующими концами
| название | год | авторы | номер документа |
|---|---|---|---|
| ОПОРА | 2008 |
|
RU2385423C1 |
| Защитный кожух | 1983 |
|
SU1147551A2 |
| ЛЕНТОЧНО-ПИЛЬНЫЙ СТАНОК | 1998 |
|
RU2139182C1 |
| УСТРОЙСТВО ДЛЯ УПРЕЖДАЮЩЕГО НАТЯЖЕНИЯ ЛЯМКИ РЕМНЯ БЕЗОПАСНОСТИ ТРАНСПОРТНОГО СРЕДСТВА | 1995 |
|
RU2116902C1 |
| Устройство для чистовой и упрочняющей обработки отверстий | 1976 |
|
SU582955A1 |
| Устройство для загрузки кассет | 1986 |
|
SU1380898A1 |
| УСТРОЙСТВО ДЛЯ ЗАЧИСТКИ МЕТАЛЛИЧЕСКИХ IПОЛОТНИЩ | 1973 |
|
SU364362A1 |
| Защитный кожух для поступательно перемещающихся объектов | 1986 |
|
SU1525357A1 |
| Автоматическое устройство термомеханического управления радиальным зазором между концами рабочих лопаток ротора и статора компрессора или турбины газотурбинного двигателя | 2018 |
|
RU2691000C1 |
| Саморегулирующийся дисковый тормоз | 1985 |
|
SU1657070A3 |
Изобретение относится к средствам механизации и автоматизации производственных процессов, а именно к модулям степеней подвижности промышленных роботов и манипуляторов. и может быть использовано в различных отраслях промышленности. Целью изобретения является упрощение технологии изготовления и повышение надежности в работе. При работе модуля происходит продольное перемещение корпуса 3 относительно неподвижного корпуса 1 под действием пневматического или электрического привода. При этом направляющие 4, выполненные в виде стальных лент, натянутых с помощью натяжных механизмов, расположенных на корпусе 3, перемещаются . по опорам 2 качения, установленным в корпусе 1. 5 ил.
фие.2
-6
сригЗ
сригЛ
(риг. 5
| Испытательные приборы и стенды: Экспресс-информация, 1983, № 37, С.1. |
