4 N3 СО 4 N3 СЛ
Изобретение относится к машиностроению, в частности к устройствам управления подравлическими прессами.
лителя вперед, с выхода эадатчика .1 положения клапанов поступает на вх(д сумматора 2, где суммируется с сигна
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система управления валом главного клапанного распределителя гидравлического ковочного пресса | 1986 |
|
SU1388326A1 |
| Следящая система управления валом гидрораспределителя гидравлического ковочного пресса | 1986 |
|
SU1361020A1 |
| Система управления главным распределителем гидравлического ковочного пресса | 1987 |
|
SU1418068A1 |
| Система управления главным распределителем гидравлического пресса | 1986 |
|
SU1411159A1 |
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1989 |
|
SU1731652A1 |
| НАСОСНО-АККУМУЛЯТОРНЫЙ ГИДРОПРИВОД | 2000 |
|
RU2184281C2 |
| Гидравлическая система управления подводным противовыбросовым оборудованием | 1983 |
|
SU1089240A1 |
| Система управления гидравлическим прессом | 1977 |
|
SU707831A1 |
| Рекуперативный гидропривод лесовозного тягача с полуприцепом | 2019 |
|
RU2726987C1 |
| ГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО СОЛНЕЧНОГО ТРЕКЕРА | 2021 |
|
RU2769457C1 |
Изобретение относится к области машиностроения, в частности к злект- рооборудованию гидравлическими прессами. Цель изобретения - расширение функциональных возможностей системы и повышение производительности и точности ковки путем улучшения динамических свойств следящей системы. Для этого в систему управления двухкла- панным распределителем с управляющими гидроцилиндрами введены два электромагнитных крана и два гидравлических блока коррекции, причем последние выполнены таким образом, что обеспечивают коррекцию интенсивности торможения штока силового гидроцилиндра пропорционально кинетической энергии движущихся частей. Одновременно блок коррекции обеспечивает ведение торможения штока силового гидроцилиндра с учетом усилия сопротивления на его валу. Путем улучшения динамических свойств следящей системы повышается производительность и точность ковки. Одновременно расширяются функциональные возможности системы за счет использования ее как в штамповочных, так и в ковочных прессах. 1 з.п.ф-лы, 2 ил. (Л
Цель изобретения - расширение функ- лом, пришедшим с выхода датчика 4 по10
15
20
циональных возможностей следящей системы, а также повышение производительности и точности ковки путем улучшения динамических свойств следящей системы.
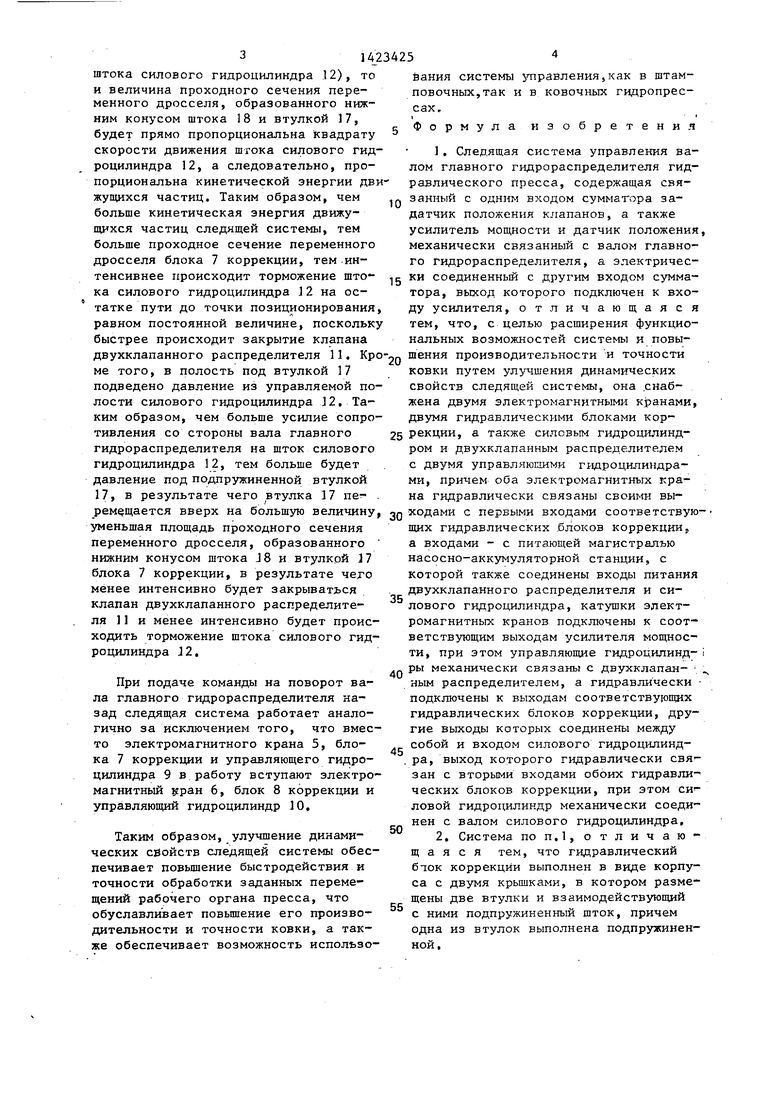
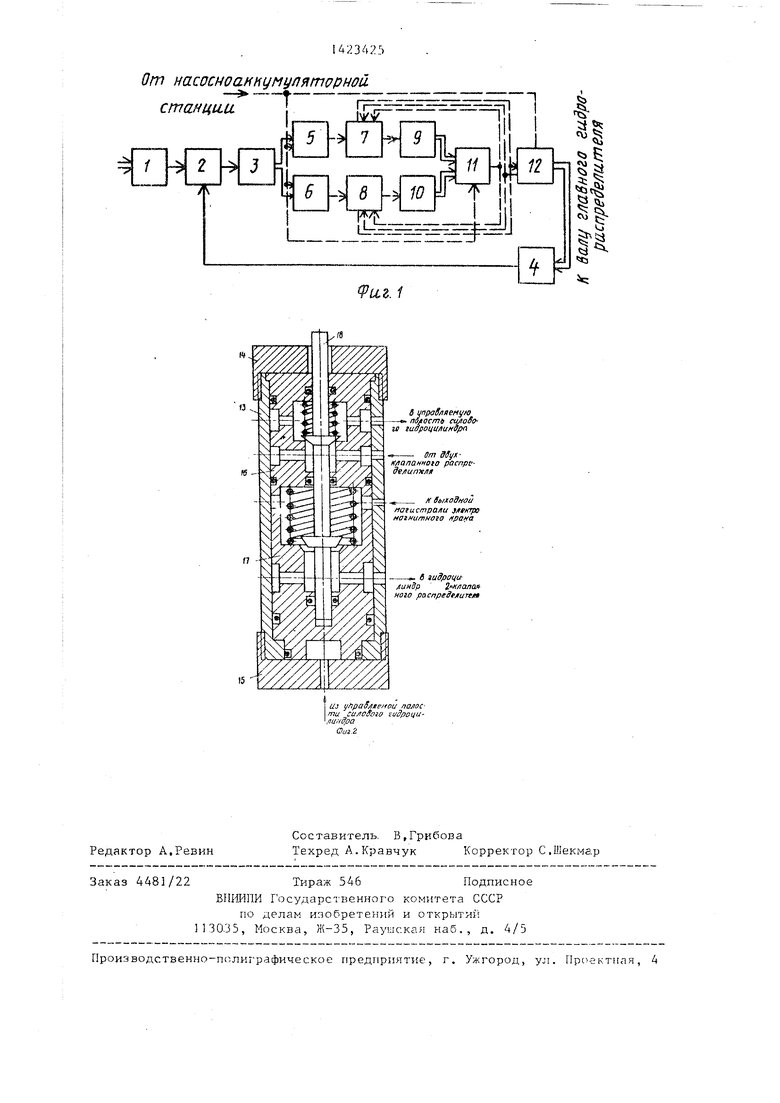
На фиг, изображена структурная схема предлагаемой следящей системы; на фиг,2 - конструктивная схема гидравлического блока коррекции,
Следящая система содержит задат- чик положения клапанов, связанный с одним входом сумматора 2, усилитель 3 мощности, датчик 4 положения, соединенный механически с валом главного гидрораспределителя, а выходом - с другим входом сумматора 2, электромагнитные краны 5 и 6, гидравлические блоки 7 и 8 коррекции, управляющие гидроцилиндры 9 и 10 двухклапанного распределителя, дВухклапанный распре-25 делитель П и силовой гидроцилйндр 12,
Электромагнитные краны 5 и 6 электрически соединены своими входами с соответствующими выходами усилителя 3 мощности и с входами соответствующих гидравлических блоков 7 и 8 коррекции, выходы которых гидравлически связаны с гидроцилиндрами 9 и 10 двухклапанного распределителя, которые механически связаны с двух- клапанным распределителем 1, последний гидравлически соединен с гидравлическими блоками 7 и 8 коррекции, выход которых гидравлически связан с силовым гидроцилиндром 12, механичес- дд ки соединенным с валом главного гидрораспределителя. Выход сумматора 2 электрически связан с входом усилите30
35
ложения, усиливается усилителем 3 мощности и поступает на вход электромагнитного крана 5, Электромагнитный кран 5 подает рабочую жидкость от магистрали насосно-аккумуляторной станции через щель между нижним конусом штока 18 и втулкой 17 блока 7 коррекции в полость управляющего гидроцилин дра 9 двухклапанного распределителя, которьй поднимает один из клапанов двухклапанного распределителя 1J, Последний подает рабочую жидкость в полость силового гидроцилиндра 12, который поворачивает вперед вал главного гидрораспределителя. При остатке пути между штоком силового гидроцилиндра и точкой позиционирования, рав ном постоянной величине, сумматор 2 подает через усилитель 3 мощности на вход электромагнитного крана 5 команду на закрытие клапана двухклапанного распределителя 11 , Электромагннт н; ньй кран 5 подает рабочую жидкость через переменный дроссель, образо- ; ванный нижним конусом штока 18 и втулкой 17 блока 7 коррекции, из полости управляющего гидроцилиндра 9 двухклапанного распределителя, на слив в насосно-аккумуляторную станцию, что приводит к закрытию клапана двухклапанного распределителя 11,
Таким образом, закрытие клапана двухклапанного распределителя 1 начинается при остатке пути между што ком силового гидроцилиндра 12 и точкой позиционирования, равном постоян- ной величине. Время закрытия клапана, а следовательно, время торможения силового гидроцилиндра 12 завиТаким образом, закрытие клапана двухклапанного распределителя 1 начинается при остатке пути между што ком силового гидроцилиндра 12 и точкой позиционирования, равном постоян- ной величине. Время закрытия клапана, а следовательно, время торможения силового гидроцилиндра 12 завиля 3 мощности.
Магистраль от насосно-аккумулятор- j ит от проходного сечения переменного ной станции соединена с питающими дросселя, образованного нижним кону- входами силового гидроцилиндра 12, ° штока 18 и втулкой 17 блока 7 электромагнитных кранов 5 и 6 и двухклапанного распределителя 1,
Гидравлический блок коррекции выполнен в виде корпуса 3 с крьш1ка- ми 14 и 15, в котором.расположены втулки 16 и 17, причем втулка 17 подпружинена, а подпружиненный шток 18,
50
коррекции.
Так как рабочая жидкость из двухклапанного распределителя 11 поступает в силовой гидроцилиндр J 2 через блок 7 коррекции, отжимая верхний конус штока 18 от втулки J6, а высота подъема штока 18 при это пропорциональна квадрату расхода жидкости через дроссельную щель, образованную верхним конусом штока 18 и втулкой 16, (т,е, высота подъема штока 18 пропорциональна квадрату скорости движения
взаимодействует с втулками J6 и 17.
Следящая система работает следующим образом.
Сигнал рассогласования, соответствующий повороту вала гидрораспреде0
5
0
5
дд
0
35
ложения, усиливается усилителем 3 мощности и поступает на вход электромагнитного крана 5, Электромагнитный кран 5 подает рабочую жидкость от магистрали насосно-аккумуляторной станции через щель между нижним конусом штока 18 и втулкой 17 блока 7 коррекции в полость управляющего гидроцилиндра 9 двухклапанного распределителя, которьй поднимает один из клапанов двухклапанного распределителя 1J, Последний подает рабочую жидкость в полость силового гидроцилиндра 12, который поворачивает вперед вал главного гидрораспределителя. При остатке пути между штоком силового гидроцилиндра и точкой позиционирования, равном постоянной величине, сумматор 2 подает через усилитель 3 мощности на вход электромагнитного крана 5 команду на закрытие клапана двухклапанного распределителя 11 , Электромагннт н; ньй кран 5 подает рабочую жидкость через переменный дроссель, образо- ; ванный нижним конусом штока 18 и втулкой 17 блока 7 коррекции, из полости управляющего гидроцилиндра 9 двухклапанного распределителя, на слив в насосно-аккумуляторную станцию, что приводит к закрытию клапана двухклапанного распределителя 11,
Таким образом, закрытие клапана двухклапанного распределителя 1 начинается при остатке пути между што ком силового гидроцилиндра 12 и точкой позиционирования, равном постоян- ной величине. Время закрытия клапана, а следовательно, время торможения силового гидроцилиндра 12 зави ит от проходного сечения переменного дросселя, образованного нижним кону- ° штока 18 и втулкой 17 блока 7
коррекции.
Так как рабочая жидкость из двухклапанного распределителя 11 поступает в силовой гидроцилиндр J 2 через блок 7 коррекции, отжимая верхний конус штока 18 от втулки J6, а высота подъема штока 18 при это пропорциональна квадрату расхода жидкости через дроссельную щель, образованную верхним конусом штока 18 и втулкой 16, (т,е, высота подъема штока 18 пропорциональна квадрату скорости движения
штока силового гидроцилиндра 12), то и величина проходного сечения переменного дросселя, образованного нижним конусом штока 18 и втулкой 17, будет прямо пропорциональна квадрату скорости движения шгока силового гидроцилиндра 12, а следовательно, пропорциональна кинетической энергии движущихся частиц. Таким образом, чем больше кинетическая энергия движущихся частиц следящей системы, тем больше проходное сечение переменного дросселя блока 7 коррекции, тем ин10
тенсивнее происходит торможение што- g ки соединенный с другим входом сумма- ка силового гидроцилиндра 12 па ос- тора, выход которого подключен к вхо- татке пути до точки позиционирования, ду усилителя, отличающаяся равном постоянной величине, поскольку тем, что, с целью расширения функцио- быстрее происходит закрытие клапана нальных возможностей cиcтe ы и повы- двухклапанного распределителя 11. Кро-- шения производительности и точности ме того, в полость под втулкой 17 ковки путем улучшения динам1гческих
свойств следящей системы, она снабжена двумя электромагнитными кранами, двумя гидравлическими блоками корподведено давление из управляемой полости силового гидроцилиндра J2, Таким образом, чем больше усилие сопротивления со стороны вала главного гидрораспределителя на шток силового гидроцилиндра 12, тем больше будет давление под подпружиненной втулкой 17, в результате чего втулка 17 пе .
25 рекции, а также силовым падроцилинд- ром и двухклапанным распределителем с двумя управляющими гидроцилиндрами, причем оба электромагнитных крана гидравлически связаны своими вы ремедается вверх на большую величину, Q ходами с первыми входами соответствую уменьшая площадь проходного сечения переменного дросселя, образованного нижним конусом щтока J8 и втулкой 17 блока 7 коррекции, в результате чего менее интенсивно будет закрываться клапан двухклапанного распределителя 1 1 и менее интенсивно будет происходить торможение штока силового гидроцилиндра 12,
35
щих гидравлических блоков коррекции,, а входами - с питающей магистралью насосно-аккумуляторной станции, с которой также соединены входы питания двухклапанного распределителя и силового гидроцилиндра, катушки электромагнитных кранов подключены к соответствующим выходам усилителя мощности, при этом управляющие гидроцилиндi ры механически связань с двухклапан- . ным распределителем, а гидравлически - подключены к выходам соответствующих гидравлических блоков коррекции, другие выходы которых соединены между собой и входом силового гидроцилиндра, выход которого гидравлически связан с вторыми входами обоих гидравлических блоков коррекции, при этом ловой гидроцилиндр механически соединен с валом силового гидроцилиндра,
При подаче команды на поворот вала главного гидрораспределителя назад следящая система работает аналогично за исключением того, что вместо электромагнитного крана 5, блока 7 коррекции и управляющего гидроцилиндра 9 в работу вступают электромагнитный 6, блок 8 коррекции и управляющий гидроцилиндр 10,
Таким образом, улучшение динамических свойств следящей системы обеспечивает повьш1ение быстродействия и точности обработки заданных перемещений рабочего органа пресса, что обуславливает повьш1ение его производительности и точности ковки, а также обеспечивает возможность исполъзования системы Т равления,как в штамповочных, так и в ковочных гидропрессах. Формула изобретения
10
1, Следящая система управления валом главного гидрораспределителя гидравлического пресса, содержащая связанный с одним входом сумматора за- датчик положения клапанов, а также усилитель мощности и датчик положения, механически связанный с валом главного гидрораспределителя, а электричес25 рекции, а также силовым падроцилинд- ром и двухклапанным распределителем с двумя управляющими гидроцилиндрами, причем оба электромагнитных крана гидравлически связаны своими ходами с первыми входами соответствую35
40
45
50
55
щих гидравлических блоков коррекции,, а входами - с питающей магистралью насосно-аккумуляторной станции, с которой также соединены входы питания двухклапанного распределителя и силового гидроцилиндра, катушки электромагнитных кранов подключены к соответствующим выходам усилителя мощности, при этом управляющие гидроцилиндры механически связань с двухклапан- ным распределителем, а гидравлически подключены к выходам соответствующих гидравлических блоков коррекции, другие выходы которых соединены между собой и входом силового гидроцилиндра, выход которого гидравлически связан с вторыми входами обоих гидравлических блоков коррекции, при этом ловой гидроцилиндр механически соединен с валом силового гидроцилиндра,
2, Система по п.1, отличающая с я тем, что гидравлический бпок коррекции выполнен в виде корпуса с двумя крьш1ками, в котором размещены две втулки и взаимодействующий с ними подпружиненный шток, причем одна из втулок выполнена подпружиненной.
От насосноаннумуляторной. cmafft4iiu
UJ ynpaS/itiffiou полости cu/ oSoio идроци- .аиидра (Sui.2
.1
б mpaS/iaenym
-I noJIOCfnu CWtoSo
If гиороцилинЯрп
От 3fyxff/ianctHHoto pQcnpe- делипуля
,/ вбиоднаи
магистрали мекгро нагниггного ярана
, 6 гид/юци/1инЗр TfK/ianoK наго pacnpfiefunt
| Калашников Ю.Т | |||
| и др | |||
| Исследование системы следящего управления валом гидрораспределителя для мощных гидравлических прессов | |||
| - Кузнечно штамповочное производство, 1979, № 2, с.27-29. |
