Изобретение относится к машиностроению, в частности к конструкции систем управления гидравлическим прессовым оборудованием.
Целью изобретения является повышение точности и быстродействия позиционирования вала гидрораспределителя путем перемещения штока гидроцилиндра с постоянной максимальной скоростью и торможение его при подходе к заданному положению с постоянным оптимальным ускорением.
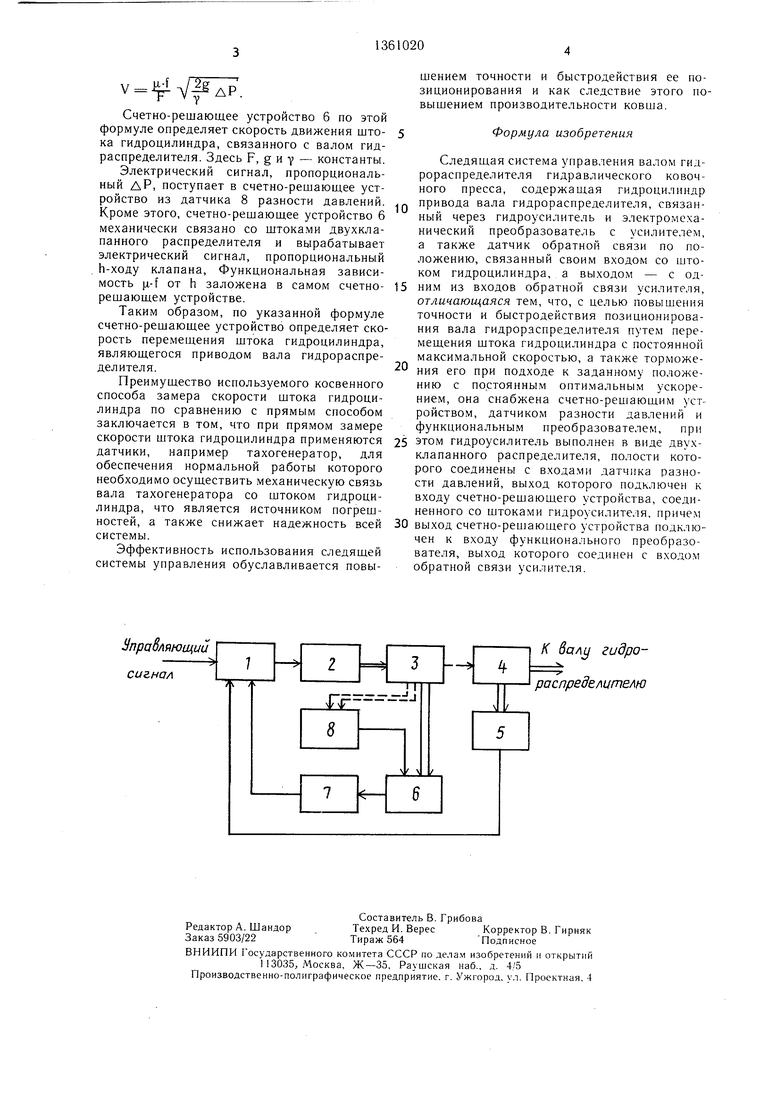
На чертеже приведена структурная схема следящей системы.
Следящая система управления валом гидрораспределителя содержит усилитель 1, который соединен через электромеханический преобразователь 2 с гидроусилителем 3, связанный с гидроцилиндром привода вала гидрораспределителя 5, датчик 4 обратной связи по положению, связанный своим входом со штоком гидроцилиндра, а выходом - с одним из входов усилителя 1, счетно- решающее устройство 6,соединенное со штоками гидроусилителя 3, через функциональный преобразователь 7 с другим входом усилителя 1 и через датчик 8 разности давлений с полостями гидроусилителя 3, который выполнен в виде двухклапанного распределителя.
Следящая система работает следующим образом.
. На управляющий вход усилителя 1 поступает электрический сигнал, пропорциональный углу поворота вала гидрораспределителя либо от сельсина, связанного с рукояткой управления при работе пресса в ручном режиме, либо от внещней системы автоматического управления гидравлическим ковочным прессом. В усилителе 1 сигнал суммируется с электрическими сигналами , поступающими на его входы обратной связи от датчика 4 обратной связи по положению и от функционального преобразователя 7. Суммарный сигнал усиливается и поступает на вход электромеханического преобразователя 2. Последний поднимает один из клапанов гидроусилителя 3, перепускающий рабочую жидкость в гидроцилиндр, который является приводом вала гидрораспределителя. Счетно-ре1нающее устройство определяет скорость движения штока гидроцилиндра, причем .электрический сигнал, пропорциональный разности давлений, поступает в счетно-решающее устройство 6 из датчика 8 разности давлений, связанного с полостями до и после запорной фа.ски клапана гидроусилителя 3.
Кроме того, счетно-рещающее устройство 6 механически связано со щтоками гидроусилителя 3 и вырабатывает электрический сигнал, пропорциональный h-ходу клапана. Электрический сигнал, пропорциональный скорости движения штока гидроцилиндра 4 из счетно-решающего устройства 6 поступает в функциональный преобразователь 7,
который вырабатывает электрический сигнал, пропорциональный квадрату скорости движения щтока гидроцилиндра. Этот сигнал поступает на вход усилителя 1. На другой
вход усилителя 1 поступает электрический сигнал, пропорциональный координате положения штока гидроцилиндра 5, из датчика 4 обратной связи по положению, связанного со штоком гидроцилиндра. При приближении текущего значения угла поворота вала гидрораспределителя к заданному значению угла усилитель 1 через электромеханический преобразователь 2 управляет гидроусилителем 3 таким образом, чтобы обеспечить следующее соотношение
V 2a-S
где V - скорость штока гидроцилиндра; а -ускорение торможения штока; S - остаток пути между текущим и заданным значением координаты штока гидроцилиндра.
Таким образом, при обеспечении усилителем равенства V п S, где г) const, следящая система обеспечивает торможение штока гидроцилиндра, соединенного с валом гидрораспределителя, с постоянным
оптимальным с точки зрения быстродействия и отсутствия гидроударов ускорением. Применение в следящей системе счетно- решающего устройства позволяет повысить производительность ковки, так как счетно- решающее устройство, являясь звеном в канале коррекции по квадрату скорости щтока гидроцилиндра, подает на вход функционального преобразователя электрический сигнал, пропорциональный скорости движения щтока гидроцилиндра. Приче.м определение скорости движения штока гидроцилиндра происходит косвенным путем. Скорость движения штока гидроцилиндра V равна
v
40
где F - эффективная площадь поршня гидроцилиндра;Q - расход рабочей жидкости через двухклапанный распределитель. Расход рабочей скорости Q определя- 45 ется известным соотношением
Q t-fV- AP
где р, - коэффициент расхода клапана;
f - площадь минимального проходного
сечения клапана;
g-ускорение свободного падения; Y - объемный вес рабочей жидкости; ДР-перепад давлений на клапане. Тогда уравнение для скорости V движения штока гидроцилиндра с учетом приведенного выражения для Q приобретает следующий вид:
V Vf АР.
Счетно-решающее устройство 6 по этой формуле определяет скорость движения штока гидроцилиндра, связанного с валом гид- распределителя. Здесь F, g и Y - константы.
Электрический сигнал, пропорциональный ДР, поступает в счетно-решающее устройство из датчика 8 разности давлений. Кроме этого, счетно-решающее устройство 6 механически связано со штоками двухкла- панного распределителя и вырабатывает электрический сигнал, пропорциональный h-ходу клапана. Функциональная зависимость |j,-f от h заложена в самом счетно- решающем устройстве.
Таким образом, по указанной формуле счетно-решающее устройство определяет скорость перемещения штока гидроцилиндра, являющегося приводом вала гидрораспределителя.
Преимущество используемого косвенного способа замера скорости штока гидроцилиндра по сравнению с прямым способом заключается в том, что при прямом замере скорости штока гидроцилиндра применяются датчики, например тахогенератор, для обеспечения нормальной работы которого необходимо осушествить механическую связь вала тахогенератора со штоком гидроцилиндра, что является источником погрешностей, а также снижает надежность всей системы.
Эффективность использования следящей системы управления обуславливается повышением точности и быстродействия ее позиционирования и как следствие этого повышением производительности ковша.
Формула изобретения
Следящая система управления валом гидрораспределителя гидравлического ковочного пресса, содержащая гидроцилиндр
,, привода вала гидрораспределителя, связанный через гидроусилитель и электромеханический преобразователь с усилителем, а также датчик обратной связи по положению, связанный своим входом со штоком гидроцилиндра, а выходом - с од5 ним из входов обратной связи усилителя, отличающаяся тем, что, с целью повышения точности и быстродействия позиционирования вала гидрораспределителя путем перемещения штока гидроцилиндра с постоянной максимальной скоростью, а также торможения его при подходе к заданному положению с постоянным оптимальным ускорением, она снабжена счетно-решающим устройством, датчиком разности давлений и функциональным преобразователем, при
5 этом гидроусилитель выполнен в виде двух- клапанного распределителя, полости которого соединены с входами датчика разности давлений, выход которого подключен к входу счетно-рещающего устройства, соединенного со щтоками гидроусилителя, причем
0 выход счетно-решающего устройства подключен к входу функционального преобразователя, выход которого соединен с входом обратной связи усилителя.
0
К валу гидро:.
распределителю
| название | год | авторы | номер документа |
|---|---|---|---|
| Следящая система управления валом главного гидрораспределителя гидравлического пресса | 1986 |
|
SU1423425A1 |
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1989 |
|
SU1731652A1 |
| Следящая система управления кулачковым валом гидрораспределителя гидравлического пресса | 1987 |
|
SU1438965A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКОЕ УСТРОЙСТВО УПРАВЛЕНИЯ | 1991 |
|
RU2010108C1 |
| Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса | 1988 |
|
SU1720894A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1988 |
|
SU1555144A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД СИСТЕМ УПРАВЛЕНИЯ РАКЕТ И УСТАНОВОК ВООРУЖЕНИЯ | 2005 |
|
RU2295699C1 |
| Система управления главным распределителем гидравлического ковочного пресса | 1987 |
|
SU1418068A1 |
| Сервопривод управления валом гидрораспределителя гидравлического пресса | 1990 |
|
SU1756174A1 |
| Электрогидравлический следящий привод | 1989 |
|
SU1754918A1 |
Изобретение относится к машиностроению, в частности к конструкции систем управления гидравлическим прессовым оборудованием. Целью изобретения является повышение точности и быстродействия позиционирования вала гидрораспределителя путем перемещения штока гидроцилиндра, являюшегося приводом вала, с постоянной максимальной скоростью и торможения его при подходе к заданному положению с постоянным оптимальным ускорением. Это достигается путем использования в известной следящей системе управления с обратной связью (ОС) по положению исполнительного органа (штока гидроцилиндра) дополнительного канала ОС по скорости перемещения этого штока. Измерение этой скорости осуществляется косвенным способом по сигналу (С) датчика разности давлений в гидрораспределителе. Последний выполнен в виде двухклапанного распределителя. Сигнал разности давлений поступает в счетно- решающее устройство, механически связанное со штоками гидроусилителя. В результате на выходе счетно-рещающего устройства формируется С, пропорциональный скорости движения щтока гидроцилиндра. С поступает на вход функционального преобразователя, который преобразует его в С квадрата скорости и подает его на один из входов ОС усилителя. На другой его вход поступает сигнал ОС по положению. На управлящий вход усилителя поступает задающий С от рукоятки или внешней системы управления. 1 ил. e (Л 00 О5 О Ю
| Попов Д | |||
| Н | |||
| Динамика и регулирование гидро- и нневмосистем.- М.: Машиностроение, 1977, с | |||
| Клапан | 1919 |
|
SU357A1 |
