Изобретение относится к машиностроению, в частности к конструкциям оборудования управления обработкой металлов давлением.
Известен сервопривод управления валом гидрораспределителя гидравлического пресса, выполненный в виде последовательно соединенных рукоятки управления с системой тяг и качалок, распределителя, гидромотора, связанного с валом гидрораспределителя, который механической обратной связью соединен с распределителем.
Недостатки известного сервопривода: недостаточно высокие точность и производительность ковки, большие усилия на рукоятке управления, недостаточно высокие надежность и долговечность работы.
Наиболее близким по технической сущности к изобретению является сервопривод, содержащий последовательно соединенные сумматор, усилитель мощности, электромеханический преобразователь, гидроусилитель и силовой гидроцилиндр, связанный с валом гидрораспределителя и через датчик положения с сумматором.
Однако наличие лишь одной обратной связи по положению выходного звена определяет недостаточно высокую производительность и точность ковки, так как в таких системах управления на скорость движения выходного звена влияет внешняя нагрузка:
v .0)
Vx
где V - скорость движения штока силового гидроцилиндра;
Vx.x - скорость холостого хода штока силового гидроцилиндра (при Др 0);
Др- перепад давлений на поршне силового гидроцилиндра, создаваемый внешней нагрузкой;
Ро - давление в напорной магистрали.
Анализ этого уравнения показывает, что при воздействии на шток силового гидроцилиндра постоянной внешней нагрузки, составляющей 30% наибольшего перестановочного усилия, развиваемого силовым гидроцилиндром, выходная скорость уменьшится на 16% по сравнению со скоростью холостого хода при этой же величине открытия гидроусилителя, а при Ар 0,8р0 скорость снизится более чем на 55%.
Кроме того, для сервопривода с одной обратной связью по положению выходного звена справедлива зависимость на этапе торможения:
V -kz,(2)
где V - скорость движения штока силового гидроцилиндра;
k - коэффициент пропорциональности;
z - разность между текущим и заданным положениями штока силового гидроцилиндра.
Тогда 5V (3)
а L-kVoe-k,
(4)
где Vo - начальная скорость движения штока.
То есть из (3) и (4) видно, что замедление штока а не является постоянной величиной и имеет максимальное значение только в начале пути торможения (при t 0)
amax . (5)
Это также снижает производительность и точность ковки.
Целью изобретения является повышение производительности и точности ковки. Поставленная цель достигается тем, что
сервопривод, содержащий последовательно соединенные сумматор, усилитель мощности, электромеханический преобразователь, гидроусилитель и силовой гидроцилиндр, соединенный с валом гидрораспределителя,
который связан через датчик положения с вторым входом сумматора, снабжен ключом, датчиком скорости, функциональным преобразователем и компаратором, при этом ключ управляющим входом соединен с
выходом сумматора через компаратор, одним входом связан с выходом датчика скорости, другим входом соединен через функциональный преобразователь с выходом датчика скорости, который связан с валом гидрораспределителя, а выходом - с третьим входом сумматора.
Применение в сервоприводе компаратора и ключа позволяет повысить производительность и точность ковки, так как ключ
по команде компаратора при остатке определенного пути до заданного положения позиционирования отключает от сумматора функциональный преобразователь и подключает к третьему входу сумматора датчик
скорости, что определяет такой закон торможения выходного звена сервопривода, при котором устраняется резкое замедление штока силового гидроцилиндра, приводящее к автоколебаниям, обусловленным
большими инерционными массами подвижных частей сервопривода и приводящим к необходимости уменьшения быстродействия.
Применение в сервоприводе функционального преобразователя и датчика скорости позволяет повысить производительность и точность ковки, так как они образуют цепь коррекции по квадрату скорости выходного звена, что повышает быстродействие и точность сервопривода за счет торможения выходного звена с постоянным оптимальным с точки зрения быстродействия и отсутствия гидроударов замедлением при подходе к заданному положению позиционирования до момента подключения ключом ктретьему входу сумматора датчика скорости.
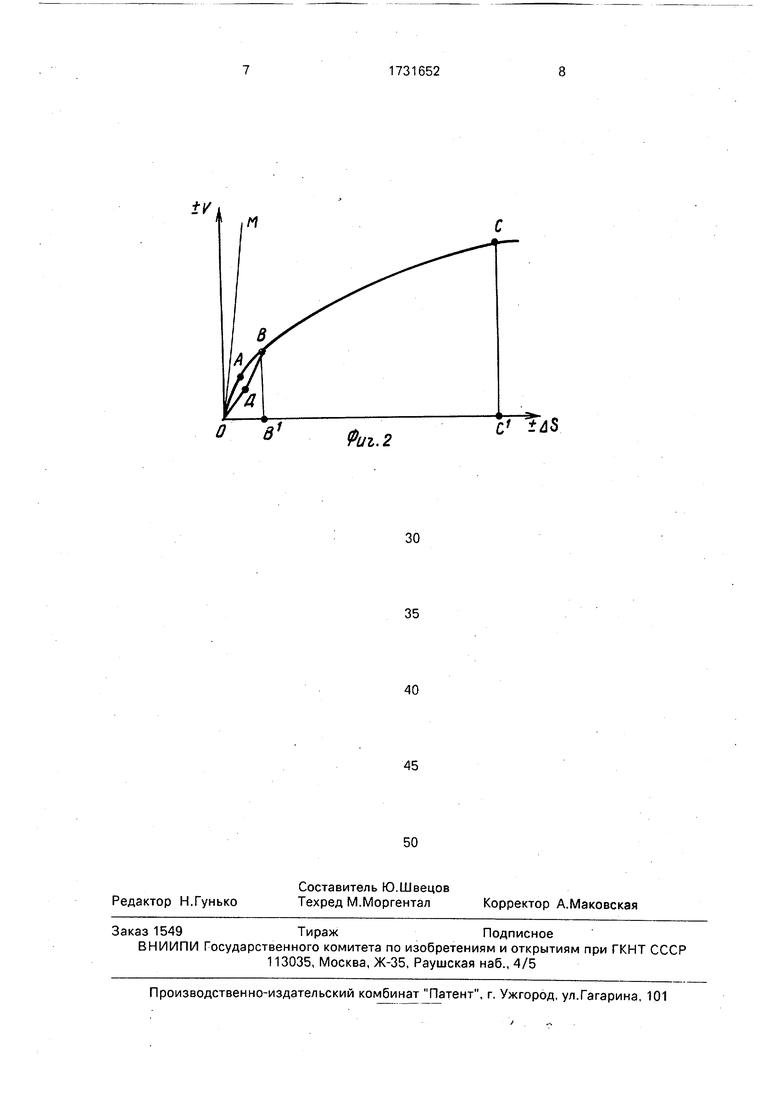
На фиг.1 представлена структурная схема сервопривода управления валом гидрораспределителя ковочного гидравлического пресса; на фиг.2 - изменение скорости V штока силового гидроцилиндра в функции остатка пути до заданного положения позиционирования AS.
Сервопривод содержит последовательно соединенные сумматор 1, усилитель 2 мощности, электромеханический преобразователь 3, гидроусилитель 4, силовой гидроцилиндр 5, соединенный с валом гидрораспределителя, который через датчик 6 положения связан с вторым входом сумматора 1, ключ 7, датчик 8 скорости, функциональный преобразователь 9 и компаратор 10. При этом ключ 7 управляющим входом соединен с выходом сумматора 1 через компаратор 10, одним входом связан с выходом датчика 8 скорости, другим входом соединен через функциональный преобразователь 9 с выходом датчика 8 скорости, который связан входом с валом гидрораспределителя, а выходом - с третьим входом сумматора 1.
Сервопривод работает следующим образом.
Электрический сигнал, пропорциональный углу поворота вала гидрораспределителя, поступает на первый вход сумматора 1, где суммируется с сигналами, пришедшими с выходов ключа 7 и датчика 6 положения, усиливается усилителем 2 мощности и поступает на вход электромеханического преобразователя 3, который, воздействуя на шток гидроусилителя 4, подает рабочую жидкость в силовой гидроцилиндр 5, поворачивающий вал гидрораспределителя в заданное положение позиционирования.
При остатке тормозного пути до заданного положения позиционирования (участок С10, фиг,2) ключ 7 соединяет функциональный преобразователь 9, на выходе которого формируется сигнал, пропорциональный квадрату скорости перемещения штока силового гидроцилиндра 5, с третьим входом сумматора 1. Последний, поддерживая пропорциональность квадрата скорости перемещения штока силового гидроцилиндра 5 величине остатка пути до заданного положения позиционирования, обеспечивает
торможение штока силового гидроцилиндра 5 с постоянным оптимальным с точки зрения быстродействия и отсутствия гидроударов замедлением (кривая СВ, фиг.2). Сохранение указанного алгоритма торможения
на участке В10 фиг.2 (кривая В АО) может привести к большой величине замедления непосредственно у заданного положения позиционирования (касательная ОМ, фиг.2), что при больших инерционных массах подвижных частей сервопривода приведет к появлению режима автоколебаний, для устранения которого необходимо уменьшить быстродействие сервопривода.
Поэтому при остатке до заданного положения позиционирования определенной величины пути (В О, фиг.2) ключ 7 по команде с выхода компаратора 10 отсоединяет функциональный преобразователь 9 от третьего входа сумматора 1 и подсоединит к последнему выход датчика 8 скорости, что обеспечит торможение штока силового гидроцилиндра 5 по закону, обеспечивающему пропорциональность скорости остатку пути до заданного положения позиционирования (прямая
ВДО, фиг.2). Это устранит возникновение автоколебаний и повысит быстродействие сервопривода.
Формула изобретения Сервопривод управления валом гидрораспределителя ковочного гидравлического пресса, содержащий последовательно соединенные сумматор, усилитель мощности, электромеханический преобразователь, гидроусилитель и силовой гидроцилиндр,
соединенный с валом гидрораспределителя, который связан через датчик положения с вторым входом сумматора и через датчик скорости с функциональным преобразователем, отличающийся тем, что, с целью
повышения производительности и точности ковки, сервопривод снабжен последовательно соединенными компаратором и ключом, при этом второй и третий входы ключа связаны соответственно с выходами функционального преобразователя и датчика скорости, а выход - с третьим входом сумматора, выход которого подключен к входу компаратора.
Фиг.2
Изобретение относится к области машиностроения, в частности к кузнечно-прессо- вому оборудованию, и может быть использовано в следящих системах управления гидравлических прессов. Цель изобретения - повышение производительности и точности ковки. Сервопривод содержит сумматор 1, усилитель 2, электромеханический преобразователь 3,гидроусилитель 4 и силовой гидроцилиндр 5, связанный с валом гидрораспределителя, а также датчики положения 6 и скорости 8 штока силового гидроцилиндра. Ключ 7 и компаратор 10, примененные в сервоприводе, позволяют реализовать закон торможения выходного звена сервопривода, при котором устраняется резкое замедление штока силового гидроцилиндра при подходе к заданному положению позиционирования, обусловленное наличием цепи 9 коррекции по квадрату скорости.2 ил. I Ё I SS i ч1 W | сл ю
| Авторское свидетельство СССР Ms 1138965, кл | |||
| Способ обработки медных солей нафтеновых кислот | 1923 |
|
SU30A1 |
