12. 39 37 20 26 1 JO 7в S 8 б 5
Р.
Л
27 5 76 /jl и 1 36 }8 ff //t /
(Л
to
СА:)
СХЗ
Изобретение относится к гидромашиностроению и может быть использовано в гидравлических системах управления реверсивных гидромашин.
Цель изобретения - уменьи ение габаритов.
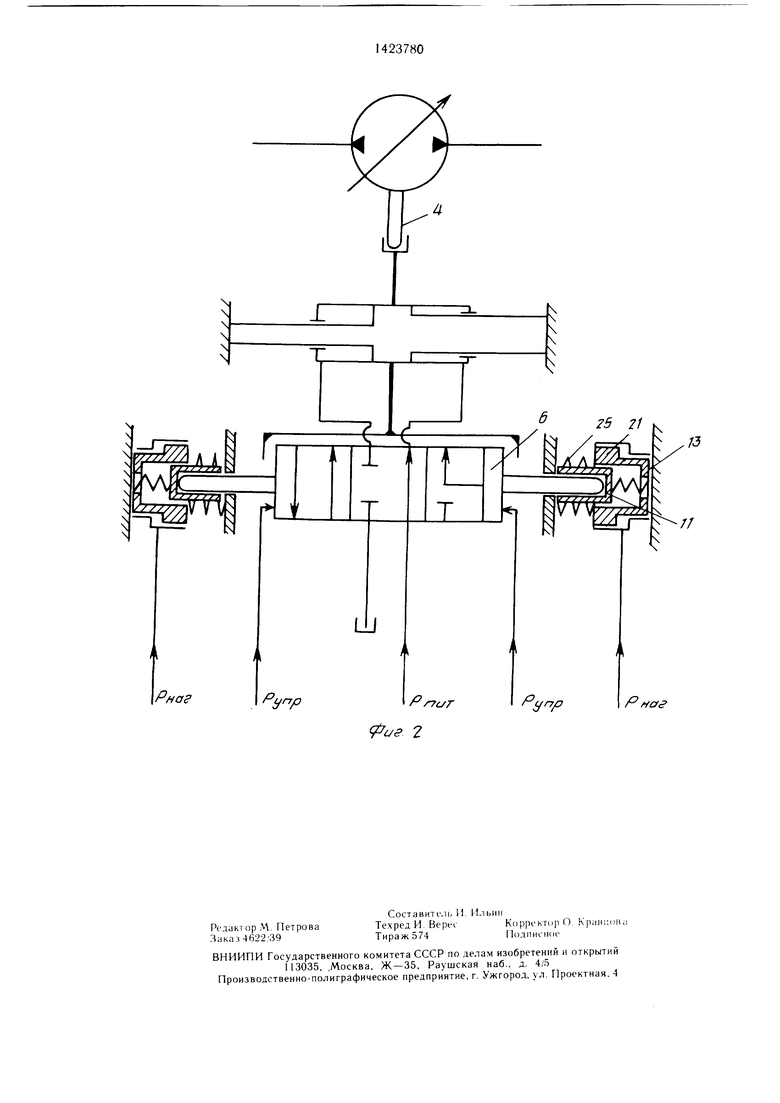
На фиг. I ноказан регулятор, разрез; на фиг. 2 гидравлическая схема регулятора.
В корпусе 1 регулятора закреплен диф ференцнальный норшень 2 исполнительного гидроцилиндра 3, подвижный корпус которого кинематически связан с поворотной люлькой 4 гидромашины.
В идроцилиндра 3 запрессована втулка 5 с.ледяпхего золотника 6, и.меющего толкатели 7 и 8, образующие задатчик положения.
По обе стороны от з(хпотника 6 расположены гидронилиндры 9 и 10 дистанционного управления, содержап1ие гильзы 11 и 12, возвратные пружины 13 и 14, плунжеры 15 и 16, регулировочные г айки 17 и контргайки 18.
В расточках гидроцилиндров 9 и 10, имею Н1ИХ ступенчатую фор.му, размешены ограничители 19 и 20 мошности. содержащие полые nopniHH 21 и 22, кольца 23 и 24, пружины 25 и 26, регулировочные гайки 27 и 28, вту.;1- к и 29 и 30.
Ko. ibna 23 и 24 и вту.лки 29 и 30 являются направляюшими для 1Д1льз II и 12.
В полости 31 гидроцилиндра 3 постоянно действует давление пигання Pini 4(.) кгс/см;; которое подводится через капа.ч 32, выполненный в поршне 2. Полость 33 гидроци- .1ипдра 3 свяюна с давлением питания в но- . 1ос1 и 31 через з(л.1отник 6.
,Чли подвода давления от блока ynpaB. ie- ния I ) (не показан) в полости 34 и 35 служат отверстия 36 и 37, кольцевые расточки 38 и 39 | идр(ли1линдров 9 и 10 и назы 40 и 41 в поршнях 21 и 22.
Отверстия 42 регу.чятора связаны с линией нагнетания 1 идр()ма1цины.
Регулятор работает с;1едуюн1им образом.
При подаче сигнала управления в виде жидкости под давлением Pwi|- в полость 34 управ, 1ения плунжер 15 нере.мешается влево, перемешая зо,1отник 6 относитель 10 корпуса гидроцилиндра 3 и втулки 5. Вместе с золотником 6 пе)еме1иается плунжер 16 и гильза 12, сжи.маюшая возвратную нружину 14.
В результате неремен1ения золотника 6 полость 3:5 гидроцилиндра 3 соединяется с iKx iocTbKj 31. Под действием давления ни- тання Р„„ корпус гидроцилиндра 3 также перемешается влево, гак как п юшадь, на которую воздействует давление, в но.:1ости 33 бо.льн1е. Вмесле с корпусом 1 перемеп|аегся пово)отная люлька 4 1 идромап1ины, изменяя
5
0
0
5
0
5
0
5
0
подачу. Это движение продолжается до тех пор, пока золотник 6 не остановится в результате уравновешивания Яупр, подводимого справа, и усилия пружины 14.
Влияние Яннги, подводимого к гидроцилиндрам 9 и 10, заключается в следующем.
Это давление, воздействуя на площадь внешнего торца поршия 22, перемещает его в направлении к золотнику 6 сжимая пружину 26. Если подача насоса при определенном давлении выходит за пределы допустимого, то поршень 22 своим внутренним торцом входит в контакт с гильзой 12, перемешая ее против воздействия Яупр, тем самым изменяя иодачу. Этим достигается поддержание в определенных пределах постоянной мощности гидромашины.
Для поддержания постоянной .мощносли вместо одной пружины (25 или 26) в каждом ограничителе 19 и 20 мощности может быть при.менено но две пружины.
При подаче сигнала управления слева - в полость 35 золотник 6 перемещается вправо. Полость 33 через каналы в золотнике 6, втулке 5 и корпусе гидроцилиндра 3 соединяется со сливом, давление в полости 31 становится больн1е давления в полости 33, г1О-т)тому корпус гидроцилиндра 3 вместе с лю.лькой 4 |-идромашины пере.мещается вправо до тех пор, пока втулка 5 не отследит перемеп1ение золотника 6.
В утом случае корректировка значения подачи при изменении давления нагнетания осуществляется ограничителем 19 мощности, а ог раничитель 20 мощности работает вхолостую.
Формула изобретения
Регулятор аксиально-порщневой гидро- , содержащий корпус, исполнитель ный гидроцилиндр с дифференциальным поршнем, связанный с ловоротной люлькой, задатчик положения поворотной люльки, выполненный в виде следящего золотника и контактирующего с ним гидроцилиндра дистанционного управления, ограничитель мошности, выполненный в виде ступенчаюго поршня, кинематически связанного с гидроцилиндром дистанционного управления, и пакет пружин сжатия, один из торцов которого взаимодействует с корпусом регулятора а другой - с поршнем ограничителя мощности через промежуточный элемент, отличающийся тем, что, с целью уменьщения габаритов, поршень ограничителя мощности выполнен полым и снабжен на внутренней поверхности выступом, взаимодействующим с гидроцилиндром дистанционного управления.
Рнаг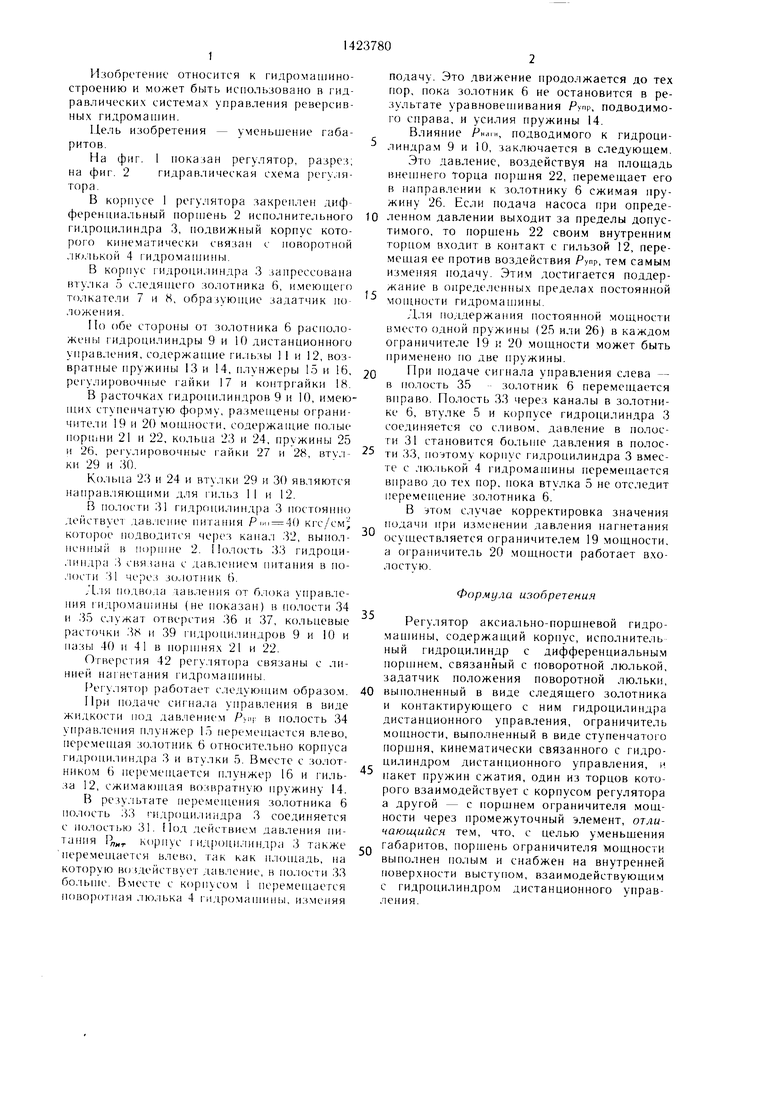
| название | год | авторы | номер документа |
|---|---|---|---|
| Регулятор аксиально-поршневой гидромашины | 1989 |
|
SU1687851A2 |
| Аксиально-поршневой насос | 1985 |
|
SU1280194A1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2002 |
|
RU2218486C1 |
| Гидравлический перфоратор | 2017 |
|
RU2656062C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2004 |
|
RU2268400C1 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ СЛЕДЯЩИЙ ПРИВОД | 2006 |
|
RU2311567C1 |
| ГИДРОРАСПРЕДЕЛИТЕЛЬ СЕКЦИИ МЕХАНИЗИРОВАННОЙ КРЕПИ | 2001 |
|
RU2199013C2 |
| ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ РУЛЕВОЙ ПРИВОД | 2013 |
|
RU2513055C1 |
| Виброплощадка | 1987 |
|
SU1525002A1 |
| РЕЗЕРВИРОВАННЫЙ СЛЕДЯЩИЙ ЭЛЕКТРОГИДРАВЛИЧЕСКИЙ ПРИВОД | 2003 |
|
RU2241143C1 |
Изобретение позволяет уменьшить габариты гидромашины. В корпусе 1 закреплен дифференциальный поршень 2 исполнительного гидроцилиндра (Г) 3. подвижный корпус к-рого кинематически связан с поворотной люлькой. Задатчик положения люльки выполнен в виде следящего золотника 6 и контактируюших с ним Г 9 и 10 дистанционного управления. В расточках Г 9 и 10, имеющих ступенчатую форму, размещены ограничители 19 и 20 мощности. Ограничители 19 и 20 содержат полные поршни 21 и 22, снабженные на внутренней поверхности выступами, взаимодействующими с Г 9 и 10. Пакет пружин 25 и 26 сжатия одним торцом взаимодействует с корпусом 1, другим - с поршнями 21 и 22. 2 ил.
| Регулятор сдвоенной аксиально-поршневой гидромашины | 1984 |
|
SU1178942A2 |
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
