Изобретение относится к области высокоскоростного наземного транспорта (ВСНТ) и, определяя устройство магнитов систем подвеса и направления транспортных и иных средств на магнитной подушке, может быть использовано в общем машиностроении и других отраслях народного хозяйства для левитации и электромагнитного бесконтактного торможения различных механических объектов, например вращающихся.
Цель изобретения повышение эффективности в режиме торможения.
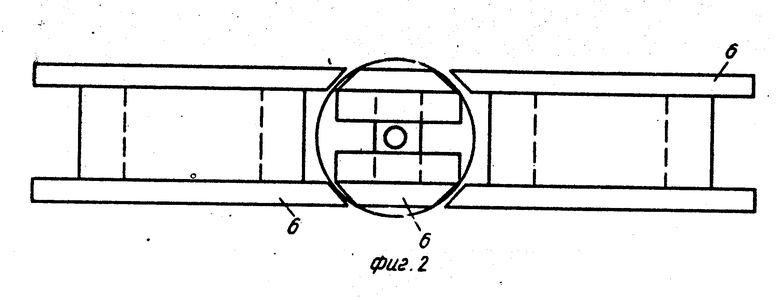
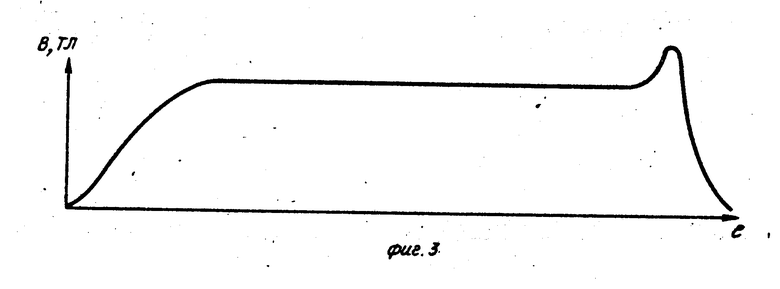
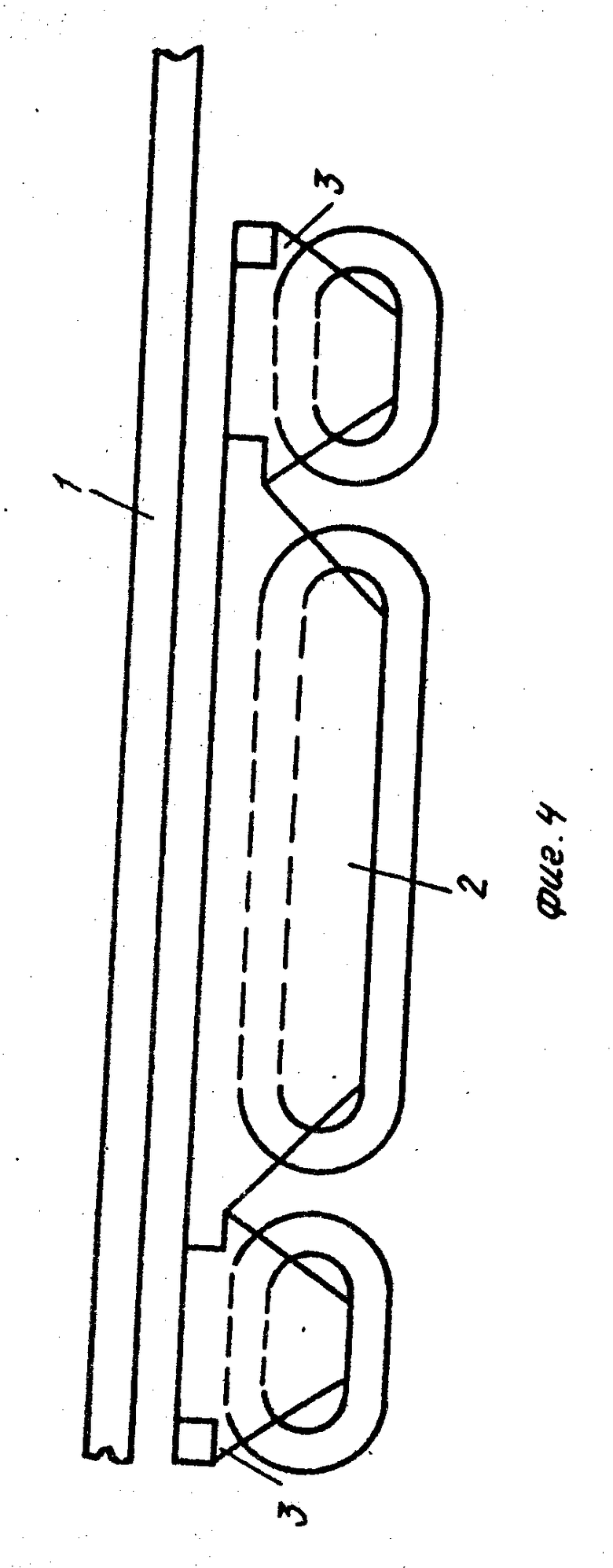
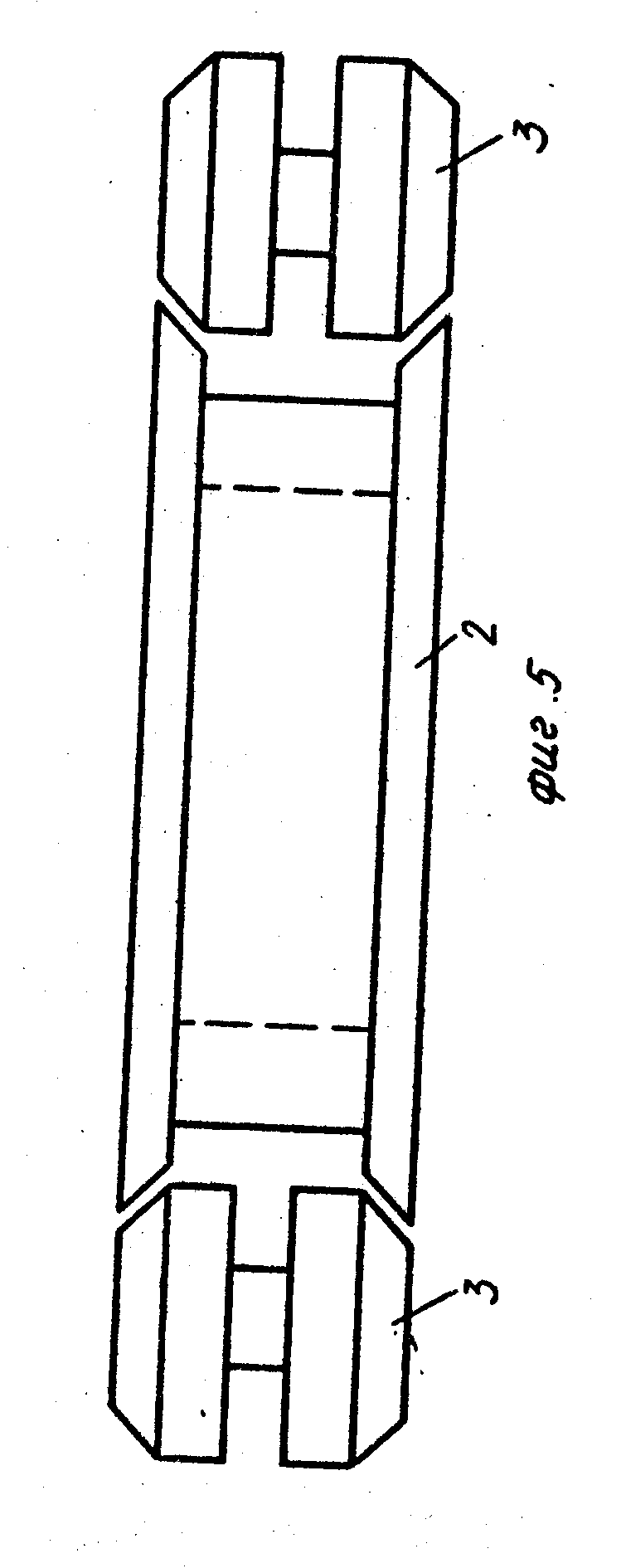
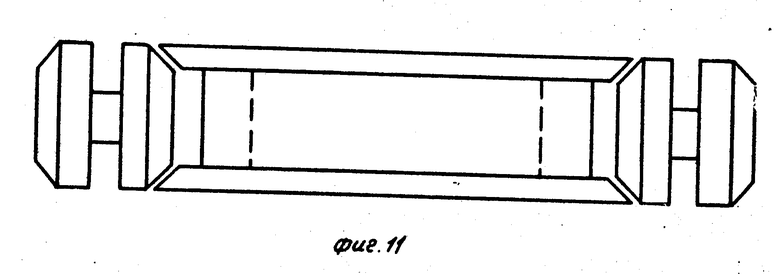
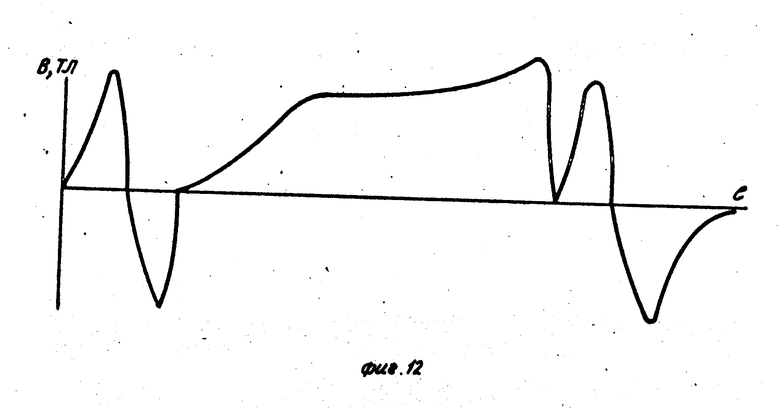
На фиг.1 показана система подвеса и направления с одним дополнительным и двумя основными магнитами, вид сбоку; на фиг.2 то же, вид сверху; на фиг.3 распределительные магнитной индукции вдоль полюса на фиг.1, 2; на фиг.4 система с двумя дополнительными и одними основными магнитами, вид сбоку; на фиг.5 то же, вид сверху; на фиг.6 распределение магнитной индукции на фиг.4, 5; на фиг.7 система подвеса и направления в режиме торможения с дополнительным магнитом, вид сбоку; на фиг.8 то же, вид сверху; на фиг.9 распределение магнитной индукции на фиг.7, 8; на фиг.10 система в режиме торможения с двумя дополнительными магнитами, вид сбоку; на фиг.11 то же, вид сверху; на фиг. 12 распределение магнитной индукции на фиг.10, 11; на фиг.13 реализация относительной подвижности магнитов.
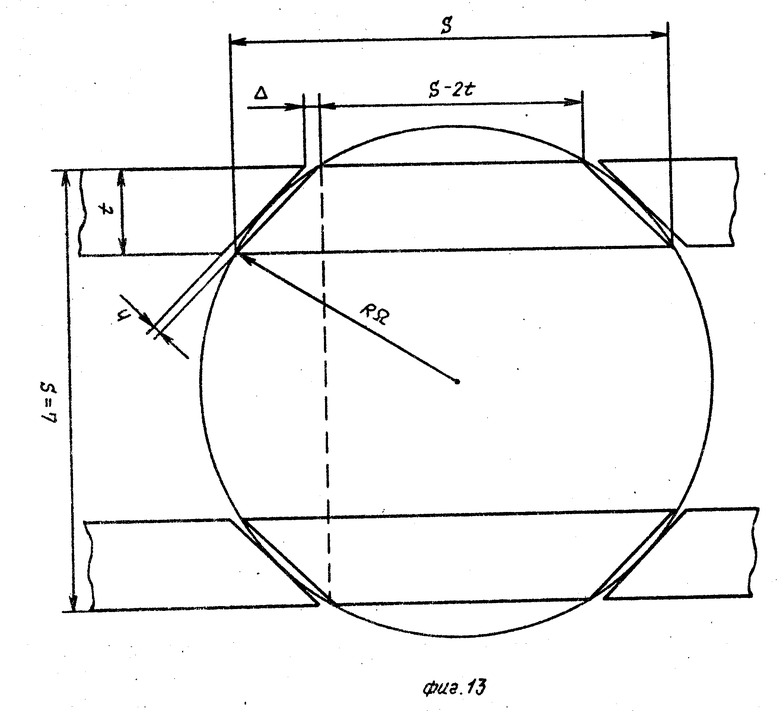
Электромагнитная система подвеса и направления состоит из ферромагнитного рельса 1, основных 2 и дополнительных 3 магнитов, установленных на транспортном средстве вдоль рельса 1. Электромагниты имеют ярмо 4 с обмоткой намагничивания 5 и полюса 6. Основные магниты 2 установлены на транспортном средстве неподвижно, а дополнительные имеют возможность поворота вокруг нормали к плоскости ярма и установлены на одной оси с основными магнитами. Угловое перемещение может быть осуществлено, например, при помощи подшипникового шкворневого узла. Реализация относительной подвижности магнитов иллюстрируется на примере поворота дополнительного магнита вокруг нормали к плоскостям ярма при помощи подшипникового шкворневого узла (фиг.13).
Конструктивно-геометрические соотношения для данного исполнения описываются уравнениями: радиус поворота RΩ secarctg(1-
secarctg(1-  ), зазор по нормали между полюсами основных и дополнительных магнитов
), зазор по нормали между полюсами основных и дополнительных магнитов
h  [secarctg(1-
[secarctg(1-  ) 1, где S длина полюса дополнительного магнита;
) 1, где S длина полюса дополнительного магнита;
t ширина полюса электромагнита.
Система работает следующим образом.
При норминальной скорости движения или на стоянке дополнительные магниты 3 по команде с пульта управления занимают фиксированное положение, при котором поле, создаваемое ими, замыкается так же, как и поле, создаваемое основными магнитами 2, т.е. в плоскости, перпендикулярной вектору скорости V. Этому положению магнитов соответствует минимум потерь на вихревые токи и минимум тормозных сил в режиме движения, а также максимум подъемного усилия в режиме стоянки. Указанный эффект возникает из-за более равномерного без провалов продольного распределения магнитной индукции (фиг.3), так как вихревые токи будут наводиться только на набегающем и сбегающем краях магнитной цепи и будут отсутствовать в ее середине.
В режиме торможения (фиг.7) дополнительный электромагнит 3, имеющий возможность поворота вокруг нормали к плоскости ярма, по команде поворачивается на угол α по отношению к вектору скорости V, при этом в продольном направлении образуются две независимые магнитные цепи, созданные основным 2 и дополнительным 3 магнитами. Магнитный поток в цепи основного электромагнита будет иметь поперечное, а в цепи дополнительного электромагнита продольное замыкание по отношению к вектору скорости V (фиг.8). На набегающем и сбегающем краях магнитов 2 и 3 (фиг.9) формируется крутой фронт магнитной индукции, создающий максимальные тормозные силы, т.е. в режиме торможения оптимально используются паразитные для движения вихревые токи. На фиг.9 и 12 представлено продольное распределение поля, показывающее, что при данной конструкции исполнения наблюдаются резкие скачки магнитной индукции, способствующих увеличению тормозных сил в режиме торможения.
В целях уменьшения падения усилий подвеса и направления в режиме движения, уменьшения массы рельса и улучшения вписывания дополнительного магнита в габариты экипажа длина полюса дополнительного магнита выполнена равной ширине основного и ширине рельса.
Оптимальное число дополнительных магнитов и их расположение по длине экипажа должно выбираться отдельно для каждого из конструктивных его решений и заданного ускорения замедления.
| название | год | авторы | номер документа |
|---|---|---|---|
| МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА ДЛЯ КОМБИНИРОВАННОГО ПУТЕПРОВОДА | 2014 |
|
RU2573135C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2739939C1 |
| ГИБРИДНЫЙ ЭЛЕКТРОМАГНИТ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2786679C2 |
| ГИБРИДНЫЙ МАГНИТ БЕЗ ПОЛЕЙ РАССЕЯНИЯ ДЛЯ СИСТЕМЫ МАГЛЕВ | 2020 |
|
RU2743753C1 |
| РЕЛЬСОВЫЙ ТОРМОЗ С ПОСТОЯННЫМИ МАГНИТАМИ | 2000 |
|
RU2185984C2 |
| ЭЛЕКТРОМАГНИТНАЯ СИСТЕМА ПОДВЕСА И НАПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1985 |
|
SU1334574A1 |
| Электромагнитная подвеска транспортного средства | 1988 |
|
SU1532354A1 |
| РЕГУЛИРУЕМЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА С КОРРЕКЦИЕЙ ПОДЪЕМНОЙ СИЛЫ | 2015 |
|
RU2611858C1 |
| КОМБИНИРОВАННЫЙ МАГНИТНЫЙ ПОДВЕС ТРАНСПОРТНОГО СРЕДСТВА | 2014 |
|
RU2573524C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ КОМБИНИРОВАННОГО ПОДВЕСА И ВЫСОКОСКОРОСТНОЙ МАГНИТОЛЕВИТАЦИОННЫЙ ТРАНСПОРТ С КОМБИНИРОВАННЫМ ПОДВЕСОМ, ФУНКЦИОНИРУЮЩИМ В СООТВЕТСТВИИ С ТАКИМ СПОСОБОМ | 2022 |
|
RU2782389C1 |

Изобретение относится к транспортной технике. Цель изобретения - повышение эффективности. Электромагнитная система подвеса и направления содержит ферромагнитный рельс 1, расположенный на путевом полотне, и установленные на транспортном средстве ряд основных электромагнитов 2 и дополнительные электромагниты 3. Дополнительные электромагниты 3 установлены с возможностью поворота вокруг нормали к плоскости ярма в одном ряду на одной оси с основными магнитами. 12 ил.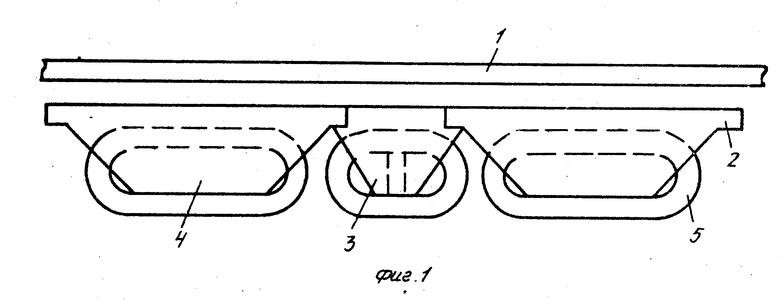
ЭЛЕКТРОМАГНИТНАЯ СИСТЕМА ПОДВЕСА И НАПРАВЛЕНИЯ ТРАНСПОРТНОГО СРЕДСТВА, содержащая установленные на полотне дороги ферромагнитный рельс и на транспортном средстве вдоль него ряд магнитов и приспособление для изменения конфигурации магнитного поля, размещенное в межполюсных зонах смежных магнитов, отличающаяся тем, что, с целью повышения эффективности в режиме торможения, приспособление для изменения конфигурации магнитного поля содержит по крайней мере один электромагнит, установленный соосно с основными магнитами с возможностью поворота в плоскости, параллельной плоскости размещения ферромагнитного рельса.
| ЭЛЕКТРОМАГНИТНАЯ СИСТЕМА ПОДВЕСА И НАПРАВЛЕНИЯ ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1985 |
|
SU1334574A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
