Изобретение относится к области сельскохозяйственного машиностроения, а именно, к гидравлическим системам, предназначенным для силового и позиционного регулирования положения навесных сельскохозяйственных орудий.
Известно устройство управления навесной системой трактора (патент ФРГ N 1267020 МКИ A 01 B 65/08, НКИ 45а-65/06, 1968г.), включающее расположенные в корпусе поворотный вал с поворотными рычагами, приводимыми в движение гидроцилиндром, и позиционным датчиком, силовой пружинный датчик, соосные силовой и позиционный рычаги управления, соединенные балансирами с соответствующими датчиками, и гидрораспределитель с золотником, служащий регулирующим элементом. Золотник контактирует с подпружиненным штоком, на котором шарнирно закреплены упомянутые балансиры.
Недостатком этого устройства является то, что не обеспечивается автоматический перевод золотника распределителя из позиции "подъем" в позицию "нейтраль" при достижении навесной системой транспортного положения.
Этого недостатка лишено устройство (патент Японии N 58-29041 МКИ A 01 B 63/111, 20.06.83г. ), в котором подпружиненный шток одним концом соединен с золотником посредством нажимного рычага, установленного на дополнительной оси, а другим концом - с суммирующим рычагом, установленным на второй дополнительной оси. Нажимной рычаг связан посредством тяги с упором, установленным на поворотном валу и выполняющим функцию конечного выключателя при транспортном положении навесной системы.
Недостатком такого устройства является наличие двух дополнительных осей, что вызывает необходимость применения специальных кулачковых профилей в позиционном датчике и в позиционном приводе, т.е. усложняет устройство. Кроме того, в данном устройстве отсутствует возможность быстрого опускания навесной системы без перестройки силового контура управления.
Предлагаемое изобретение направлено на решение задачи по устранению указанных недостатков, т. е. на упрощение конструкции устройства за счет исключения промежуточных осей, и на расширение функциональных возможностей устройства управления навесной системой трактора путем введения позиции быстрого опускания.
Решение поставленной задачи достигается тем, что заявляемое устройство управления навесной системой трактора содержит установленный в корпусе поворотный вал с неподвижно закрепленными на нем поворотными рычагами, позиционным датчиком и упором конечного выключателя, силовой датчик, состоящий из опертой посредством пружины на корпус серьги, соосные позиционный и силовой рычаги управления соединенные, соответственно, двумя балансирами с позиционным датчиком и серьгой силового датчика, гидрораспределитель с золотником, связанным с одним плечом двуплечего нажимного рычага. На втором плече нажимного рычага установлен подпружиненный шток, соединенный с суммирующим рычагом. Двуплечий нажимной рычаг установлен с возможностью вращательного движения на поворотном валу и снабжен контактным элементом для взаимодействия с упором конечного выключателя при верхнем положении поворотных рычагов. Суммирующий рычаг установлен между позиционным и силовым рычагами управления на их же оси и снабжен двумя упорами для контакта с балансирами. Середины балансиров могут быть шарнирно закреплены на опорных рычагах, установленных на оси позиционного и силового рычагов управления и контактирующих с упорами суммирующего рычага. Двуплечий нажимной рычаг может быть соединен дополнительной тягой с позиционным рычагом управления в случае установки последнего в позицию, соответствующую нижнему положению поворотных рычагов. Это дает возможность осуществить быстрое опускание навесной системы трактора.
Новым в предлагаемом изобретении является то, что двуплечий нажимной рычаг установлен с возможностью вращательного движения на поворотном валу и снабжен контактным элементом для взаимодействия с упором конечного выключателя при верхнем положении поворотных рычагов. Суммирующий рычаг установлен между позиционным и силовым рычагами управления на их же оси и снабжен двумя упорами для контакта с балансирами. Середины балансиров могут быть шарнирно закреплены на опорных рычагах, установленных на оси позиционного и силового рычагов управления и контактирующих с упорами суммирующего рычага. Двуплечий нажимной рычаг может быть соединен дополнительной тягой с позиционным рычагом управления в случае установки последнего в позицию, соответствующую нижнему положению поворотных рычагов.
Изобретение поясняется эскизом. Устройство управления навесной системой трактора состоит из корпуса 1, в котором установлен поворотный вал 2 с закрепленными на нем снаружи корпуса 1 поворотными рычагами 3 и 4, гидрораспределителя 5 с подпружиненным золотником 6, оси 7 с закрепленными на ней продольными тягами 8 и 9, оси 10, серьги 11, опертой через пружину 12 на корпус 1. Серьга 11 и пружина 12 составляют собой силовой датчик. К серьге 11 прикреплена центральная тяга 13, а продольные тяги 8 и 9 соединены раскосами 14 и 15 с поворотными рычагами 3 и 4. На корпусе 1 установлен гидроцилиндр 16, связанный с поворотным рычагом 3. На валу 2 установлен качающийся двуплечий рычаг 17, через ролик 18 одним плечом соединенный с золотником 6. Второе плечо нажимного рычага 17 посредством штока 19 с предварительно поджатой пружиной 20 соединено с суммирующим рычагом 21, имеющим упоры 22 и 23. Суммирующий рычаг 21 расположен на оси 10 между опорными рычагами 24 и 25, на которых шарнирно закреплены балансиры 26 и 27. Нижнее плечо балансира 26 соединено посредством тяги 28 с рычагом 29, неподвижно закрепленным на валу 2 и служащим позиционным датчиком, т.е. датчиком положений навесной системы относительно трактора. Верхнее плечо балансира 26 связано с позиционным рычагом управления 30, осью 10 жестко соединенного с позиционной рукояткой управления 31. Нижнее плечо второго балансира 27 связано тягой 32 с серьгой 11, а верхнее плечо - с силовым рычагом управления 33, соединенного с силовой рукояткой управления 34, и также установленного на оси 10. В нажимном рычаге 17 выполнена прорезь 35, в которой расположен закрепленный на поворотном валу 2 упор 36. Нажимной рычаг 17 соединен посредством тяги с пазом 37 с шарниром 38 позиционного рычага управления 30.
Золотник 6 имеет три позиции: О - "опускание", Н - "нейтраль", П - "подъем".
Навесные сельскохозяйственные орудия присоединяются к трактору посредством продольных тяг 8, 9 и центральной тяги 13.
Устройство управления навесной системой трактора работает следующим образом. В случае использования силового способа регулирования например, на пахоте, позиционная рукоятка управления 31 устанавливается против стрелки А в положение, соответствующее близкому к нижнему положению навесной системы. При этом между упором 22 на суммирующем рычаге 21 и опорным рычагом 24 образуется зазор, в пределах которого осуществляется работа силового контура регулирования.
Плуг, навешенный на трактор посредством продольных тяг 8, 9 и центральной тяги 13, в процессе пахоты создает на серьге 11 силу, соответствующую сопротивлению почвы движущемуся плугу, т.е. глубине пахоты. Этой силе отвечает определенное положение силовой рукоятки управления 34. Золотник 6 гидрораспределителя 5 при этом находится в позиции "нейтраль".
При увеличении сопротивления почвы, в случае наезда плуга на более плотный участок или при чрезмерном заглублении плуга вследствие неровности поверхности почвы, серьга 11 перемещается, сжимая пружину 12 и вызывая через тягу 32 поворот балансира 27 по часовой стрелке вокруг шарнира силового рычага управления 33. Опорный рычаг 25, увлекаемый балансиром 27, нажимает на упор 23 суммирующего рычага 21. Суммирующий рычаг 21 посредством предварительно поджатой пружины 20, находящейся на штоке 19, поворачивает по часовой стрелке вокруг поворотного вала 2 нажимной рычаг 17, который роликом 18 передвигает золотник 6 в позицию "подъем". Гидрораспределитель 5 направляет масло в гидроцилиндр 16. Последний через поворотные рычаги 3 и 4, раскосы 14 и 15 и продольные тяги 8 и 9 начинает выглублять плуг, снижая силу на серьге 11. Золотник 6 возвращается в позицию "нейтраль", и подъем плуга прекращается.
При наезде плуга на менее плотный участок почвы обратным образом происходит его заглубление.
При повороте силовой рукоятки управления 34 по стрелке А силовой рычаг управления 33 балансиром 27 поворачивает опорный рычаг 25 по часовой стрелке, воздействуя на упор 23 суммирующего рычага 21, который через пружину 20 на штоке 19, нажимной рычаг 17 и ролик 18 переводит золотник 6 в позицию "подъем". Плуг поднимается, через центральную тягу 13, серьгу 11 с пружиной 12, тягу 32 переставляя балансир 27 и следующую за ним вышеописанную кинематическую цепь к золотнику 6 в прежнее положение "нейтраль". Таким образом происходит настройка на меньшую глубину пахоты.
При поворачивании силовой рукоятки управления 34 в противоположном стрелке А направлении, плуг будет настраиваться на большую глубину.
Для работы на позиционном способе регулирования силовая рукоятка управления 34 устанавливается в положение максимальной глубины (против стрелки А). Теперь при перемещении позиционной рукоятки управления 31 в направлении стрелки А поворачивается ось 10 с позиционным рычагом управления 30 по часовой стрелке. Последний посредством балансира 26, опорного рычага 24, входящего в контакт с упором 22 на суммирующем рычаге 21, суммирующего рычага 21 и дальнейшей цепи, воздействует на золотник 6, устанавливая его в позицию "подъем". Навесная система начинает подниматься, при этом поворотный вал 2 поворачивается против часовой стрелки, позиционный датчик 29 через тягу 28 и балансир 26 восстанавливает позицию "нейтраль" золотника 6.
Обратное перемещение позиционной рукоятки управления 31 вызывает синхронное опускание навесной системы.
При различных взаимных положениях позиционной 31 и силовой 34 рукояток управления достигаются различные комбинации воздействия силового и позиционного датчиков на золотник 6 гидрораспределителя 5.
В случае быстрого перемещения позиционной 31 или силовой 34 рукояток управления в направлении стрелки А (на подъем) со скоростью, превышающей скорость подъема навесной системы трактора, золотник 6 полностью выбирает свой ход от позиции "нейтраль" до позиции "подъем" и тогда сжимается пружина 20 на штоке 19, обеспечивая удержание золотника 6 в позиции "подъем". Когда поворотные рычаги 3 и 4 доходят до своего верхнего положения (транспортного), упор 36 на поворотном валу 2 входит в контакт с верхним краем прорези 35 нажимного рычага 17, заставляя его повернуться против часовой стрелки за счет упругой деформации пружины 20. Золотник 6 гидрораспределителя 5 перемещается из позиции "подъем" в позицию "нейтраль".
Если имеется необходимость быстро заглубить плуг, не нарушая настройки рукоятки управления 34 силового контура, то позиционная рукоятка управления 31 устанавливается в противоположном стрелке А направлении дальше положения, соответствующего крайнему нижнему положению поворотных рычагов на позиционном способе регулирования. При этом позиционный рычаг управления 30 шарниром, находящимся в пазу 38 тяги 37, упирается в правый край паза 38 и посредством этой тяги поворачивает нажимной рычаг 17 против часовой стрелки. Золотник 6 перемещается в позицию "опускание".
| название | год | авторы | номер документа |
|---|---|---|---|
| Разгрузочное устройство для регулятора позиционно-силового типа | 1978 |
|
SU685176A1 |
| ГИДРОСИСТЕМА С СИЛОВЫМ, ПОЗИЦИОННЫМ и КОМБИНИРОВАННЫМ РЕГУЛИРОВАНИЕМ ГЛУБИНЫОБРАБОТКИ | 1971 |
|
SU288820A1 |
| УСТРОЙСТВО ДЛЯ КОМБИНИРОВАННОГО УПРАВЛЕНИЯ НАВЕСНЫМ ОРУДИЕМ | 1972 |
|
SU352616A1 |
| ГИДРОРАСПРЕДЕЛИТЕЛЬ РЕГУЛЯТОРА ПОЗИЦИОННО- | 1972 |
|
SU352615A1 |
| ПЕРЕКЛЮЧАТЕЛЬ РЕЖИМОВ РЕГУЛИРОВАНИЯ ДЛЯ РЕГУЛЯТОРА ПОЗИЦИОННО-СИЛОВОГОТИПА | 1971 |
|
SU420264A1 |
| ПЕРЕКЛЮЧАТЕЛЬ РЕГУЛЯТОРА ПОЗИЦИОННО-СИЛОВОГО ТИПА | 1972 |
|
SU353664A1 |
| ГИДРОРАСПРЕДЕЛИТЕЛЬ ДЛЯ РУЧНОГО | 1971 |
|
SU301453A1 |
| РАЗГРУЗОЧНЫЙ ПЕРЕКЛЮЧАТЕЛЬ РЕЖИМОВ РЕГУЛИРОВАНИЯ ДЛЯ РЕГУЛЯТОРА ПОЗИЦИОННО- СИЛОВОГО ТИПА | 1971 |
|
SU309668A1 |
| УСТРОЙСТВО ДЛЯ СНИЖЕНИЯ БУКСОВАНИЯ ТРАКТОРА С УНИВЕРСАЛЬНОЙ ГИДРОНАВЕСНОЙ СИСТЕМОЙ | 1972 |
|
SU424523A1 |
| ГИДРОСИСТЕМА С СИЛОВЫМ И ПОЗИЦИОННЫМ РЕГУЛИРОВАНИЕМ ГЛУБИНЫ ОБРАБОТКИ | 1971 |
|
SU312557A1 |
Устройство предназначено для сельскохозяйственного машиностроения и может быть использовано для силового и позиционного регулирования положения навесных сельскохозяйственных орудий. Устройство содержит установленный в корпусе (1) поворотный вал (2) с неподвижно закрепленными на нем поворотными рычагами (3, 4), позиционным датчиком (12) и упором (36) конечного выключателя, силовой датчик, состоящий из опертой посредством пружины (12) на корпус (1) серьги (11), соосные позиционный и силовой рычаги (30, 33) управления, соединенные балансирами (26, 27), соответственно, с позиционным датчиком (29) и серьгой (11) силового датчика, гидрораспределителем (5) с золотником (6), шарнирно связанным с первым плечом двуплечего нажимного рычага (17), при этом на втором плече установлен подпружиненный шток ( 19), соединенный с суммирующим рычагом (21). Двуплечий нажимной рычаг (17) установлен с возможностью вращательного движения на поворотном валу (2) и снабжен контактным элементом (35) для взаимодействия с упором (36) конечного выключателя при верхнем положении поворотных рычагов (3, 4). Суммирующий рычаг (21) установлен между позиционным и силовым рычагами (30, 33) управления на их же оси (10) и снабжен двумя упорами (22, 23) для взаимодействия с балансирами (26, 27). Применение устройства позволит упростить конструкцию устройства и расширить его функциональные возможности. 2 з.п.ф-лы, 1 ил.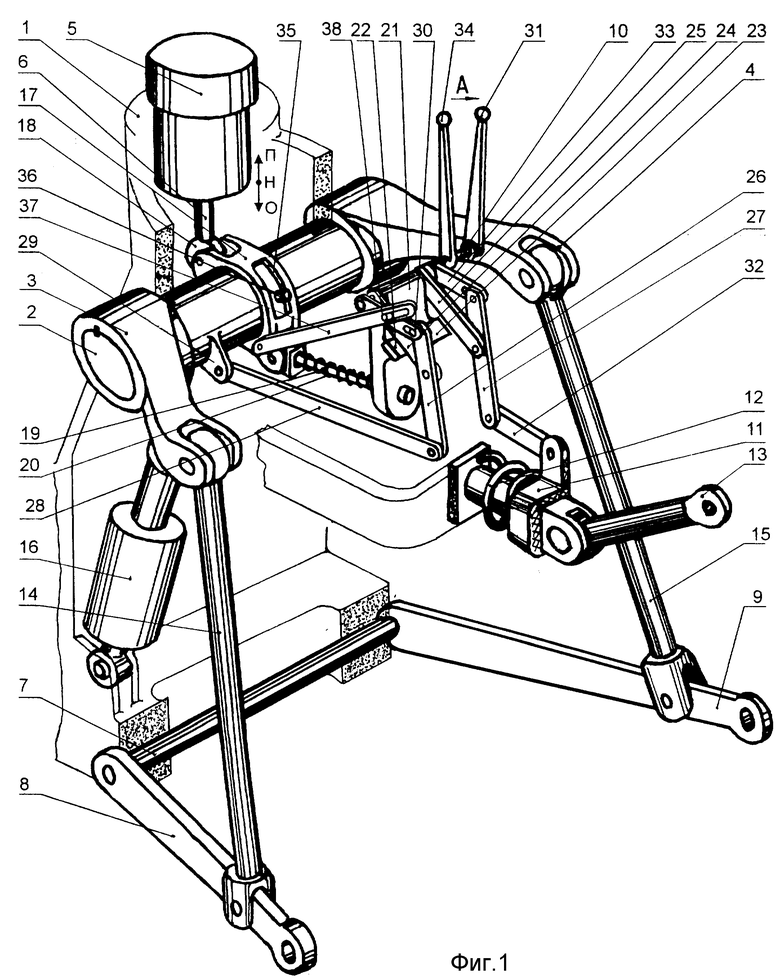
| Способ окисления боковых цепей ароматических углеводородов и их производных в кислоты и альдегиды | 1921 |
|
SU58A1 |
| Способ работы четырехтактного двигателя внутреннего сгорания | 1985 |
|
SU1267020A2 |
| DE 3617228 A, 11.06.87 | |||
| УСТРОЙСТВО ДЛЯ СНИЖЕНИЯ БУКСОВАНИЯ ТРАКТОРА С УНИВЕРСАЛЬНОЙ ГИДРОНАВЕСНОЙ СИСТЕМОЙ | 1972 |
|
SU424523A1 |
| Механизм переключения видов регулирования положения навесных орудий и гидроувеличителя сцепного веса трактора | 1976 |
|
SU668637A1 |
| Устройство для выбора режима автоматического регулирования положения навесного орудия | 1981 |
|
SU1029848A1 |

