Изобретение относится к автоматическому регулироваго и может быть использовано в цифровых системах автоматического регулирования с ис полнит ел ьнь.1М двухфазным асинхронньм двигателем когда к стат:стческой составляющей ошибки регулргрования предъявляются жесткие требования в широком диапазоне изменения условий эксплуатации.
Цель изобретения - повышение точ
НОСТИа
; Сущность изобретения заключается - обеспечении возможности устранения : ;татической составляющей ошибки . Урегулирования системы, вызванной из ;5ченением широкого спектра эксплуатационных УСЛОВИЙ5 как при ступенчатом,,
так и синусоидальном входных воздействиях.
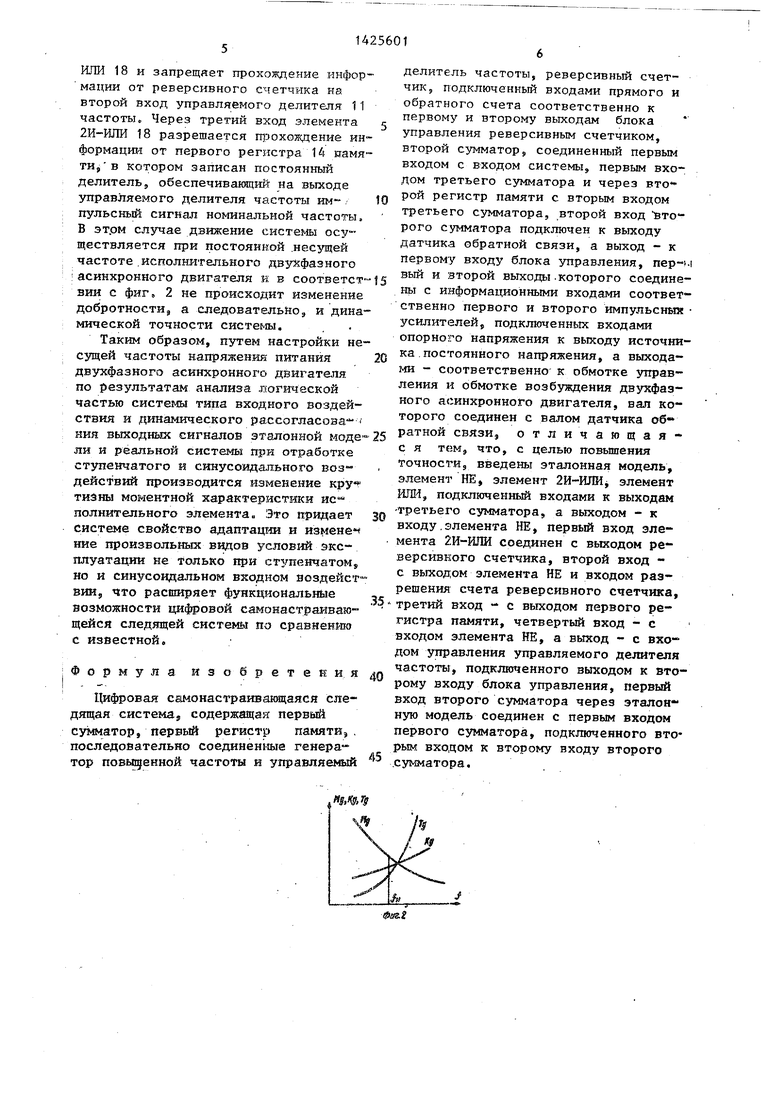
На фиг,, 1 представлена функциональ :ная схема цифровой самонастраивающей- г;я следящей системы; на фиг. 2 - за ;ьисимости момвнта на валу Мд(), электромеханической постоянной време™ ни Тд() и коэффициента передачи K.(f) от частоты напряжения питания двухфазного асинхронного двигателя; на фиг. 3 недопустимые виды динамического рассогласования вьпсодных сигналов эталонной модели и системы ,на фиг, 4 - допуст1-шые виды невязки.
Цифровая самонастраивающаяся следя щая система содерх ит (фиг. 1) первый сумматор 1., блок 2 управления, первый импульсньй .усилитель 3, обмотку 4 управленияS ротор 5 двухфазного асинхронного двигателяj датчик 6 обратной связи, второй импульсный усили 7, обмотку 8 возбуждения, источ- Йик 9 постоянного напряжения, гене ратор 10 повышенной частоты, управ- ляемьш делитель 11 частоты, блок 12 управления реверсивным счетчиком, реверсивный счетчик 13, первый регистр 1А памяти, второй сумматор 15,
Ш
15
20
25
30
35
40
45
ный прямой код Х(п)) со значением сигнала обратной связи (параллельны обратный код Y(n)), Код ошибки корректируется и блоке 2 управления и преобразуется в шйротно-модулирован ные импульсы несущей частоты управл щего сигнала (для обмотки 4 управле ния) и импульсньй сигнал постоянной скважности для обмотки 8 возбуждени двухфазного асинхронного двигателя. Цервый 3 и второй 7 усилители производ их усиление по амплитуд е до напряжени источника 9 постоянного напряжения, п тупающего на входы опорного напряжени усилителей 3 и 7. Таким образом, в соо
дветствим с сигналом рассогласования б(п) двухфазным асинхронным двигат лем с некоторой ошибкой, зависящей условий эксплуатации, возмущающих моментов и т.До 5 отрабатывается вхо ное воздействие Х(п).
Из теории следящих систем извест что режимы движения реальных следящих систем при отработке ступенчаты воздействий и синусоидальных вблизи моментов реверса исполнительной оси
характеризуются высоким значением статической составлякщей ошибки регулирования. Признаком такой ситуации в .цифровых системах являет ся равенство нулю первой разности входного воздействия (с учетом кван тования по уровню). Производимое в системе изменение несущей затрагивает не только изменение крутизны моментной характеристики исполнител ного двухфазного асинхронного двига теля, но и через коэффициент его передачи Кд() влияет на добротност системы и может приводить (при сниж нии несущей) к ее уменьшению, а следовательно, увеличению динамичес кой ошибки. Поэтому целесообразно воздействовйть на статическую ошибк системы в кратковременные моменты е превалирзпощего значения в общей оши
элемент ИЛИ 16, элемент НЕ 17, эле- ке системы, а именно, при7Х.(п)0.
5
0
5
0
5
0
5
ный прямой код Х(п)) со значением сигнала обратной связи (параллельный обратный код Y(n)), Код ошибки кор i ректируется и блоке 2 управления и преобразуется в шйротно-модулирован- ные импульсы несущей частоты управляющего сигнала (для обмотки 4 управления) и импульсньй сигнал постоянной скважности для обмотки 8 возбуждения двухфазного асинхронного двигателя. Цервый 3 и второй 7 усилители производят , их усиление по амплитуд е до напряжения источника 9 постоянного напряжения, поступающего на входы опорного напряжения усилителей 3 и 7. Таким образом, в соотдветствим с сигналом рассогласования б(п) двухфазным асинхронным двигате лем с некоторой ошибкой, зависящей от условий эксплуатации, возмущающих моментов и т.До 5 отрабатывается входное воздействие Х(п).
Из теории следящих систем известно, что режимы движения реальных следя. щих систем при отработке ступенчатых воздействий и синусоидальных вблизи моментов реверса исполнительной оси
характеризуются высоким значением статической составлякщей ошибки регулирования. Признаком такой ситуации в .цифровых системах является равенство нулю первой разности входного воздействия (с учетом квантования по уровню). Производимое в системе изменение несущей затрагивает не только изменение крутизны моментной характеристики исполнительного двухфазного асинхронного двигателя, но и через коэффициент его передачи Кд() влияет на добротность системы и может приводить (при снижении несущей) к ее уменьшению, а следовательно, увеличению динамической ошибки. Поэтому целесообразно воздействовйть на статическую ошибку системы в кратковременные моменты ее превалирзпощего значения в общей ошиб

| название | год | авторы | номер документа |
|---|---|---|---|
| АНАЛОГО-ЦИФРОВОЙ ПРЕОБРАЗОВАТЕЛЬ УГЛА | 1996 |
|
RU2115229C1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Электропривод с частотно-токовым управлением | 1985 |
|
SU1319226A2 |
| Электропривод переменного тока | 1979 |
|
SU961087A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1990 |
|
SU1777225A1 |
| Способ фазового управления асинхронным электродвигателем и устройство для его осуществления | 1978 |
|
SU928582A1 |
| Цифровое псевдолинейное корректирующее устройство | 1984 |
|
SU1190360A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1986 |
|
SU1339857A1 |
| Устройство для управления двухфазным асинхронным электродвигателем | 1987 |
|
SU1525852A1 |
| Устройство для управления частотой вращения ротора асинхронного электродвигателя | 1984 |
|
SU1277343A1 |

Изобретение относится к автоматическому регулированию и может быть использовано в цифровых системах автоматического регулирования и исполнительным двухфазным асинхронным двигателем, когда к статической составляющей ошибки регулирования предъявляются жесткие требования v«f«; в широком диапазоне изменения уело- ВИЙ -эксплуатации. Цель изобретения - повьшение точности. Цифровая самонастраивающаяся следящая система содержит первый сумматор 1, блок 2 управления, первый импульсный усили- .тель 3, обмотку 4 управления, ротор 5 двухфазного асинхронного двигателя, датчик 6 обратной связи, -второй импульсный усилитель 7, обмотку 8 возбуждения, источник 9 постоянного напряжения, генератор 10 повышенной частоты, управляемый делитель, 11 частоты, блок 12 управления реверсивным счетчиком, реверсивный счетчик 13, первый регистр 14 памяти, второй сумматор 15, элемент ШШ 16, элемент НЕ 17, элемент 2И-ИЛИ 18, второй регистр 19 памяти,, эталонную модель 20 и третий сз мматор 21. Цель изобретения достигается за счет введения элементов 16-18 и эталонной модели 20. 4 ил. (Л С
5
мент 18, второй регистр 19 памяти, эталонную модель 20 и третий сумматор 21,
Система работает следушвтдш образом. .
При поступлении на его вход .цис- кретного входного воздействия произ- вольной формы второй сумматор 15 . , (фиг. 1) вычисляет ошибку 0(п) его отработкнр с зтамируя значение входяо- го сигнала на первом входе (параллель0
Вьгчисхшние первой разности производится следзпощим образом. Входной сигнал Х(п) поступает на вход второго регистра 19 памяти, хранящего информацию о значении сигнала в преды- дупр-тй момент квантования Х(), и первый эхол третьего сумматора 21, вычисляющего первую разность vX(n)« Х(п)-Х(). Абсолютное значение последней (без знакового разряда) подается на входы элемента ИЛИ 16, формируницего на выходе соответственно сигналь П и 1 в случае VX(n)) 0 и (vX(n))sl, которые инвертируются элементом НЕ 17 и используются в последующем для организации интервалов насторойки несущей частоты напряжения питания двухфазного асинхронного двигателя. Параллельно с основным контуром системы входное воздействие отрабатывается эталонной моделью 20. Выходные сигналы Y(n) с выхода датчика 6 обратной связи и эталонной моде- ши 20 Y,(n) поступают, соответствен- но, на второй и первый входы первого сумматора 1, на котором вычисляется их динамическое рассогласование (невязка)
9(п) Y(n) - Y(n).
При отклонении параметров элементов системы от исходных значений сигнал динамического рассогласования отличен от нуля, что инициирует работу блока 12 управления реверсивным счетчикомS который анализирует знак
величины
QMOKC Эмик ) (6«)
где макс 1 )
В максимальное, минимальное и амплитудное значение невязки на интервале собственных колебаний системы.
Алгоритм настройки несущей частоты напряжения питания двухфазного асинхронного двигателя определяется рекуррентным соотношением
f(n+1) f( sign Zo,
где n - номер шага настройки частоты &f - шаг настройки частоты, выбираемый из условия сходимости алгоритма.
По знаку величины Zg определяетс направление изменения частоты напряжения питания двухфазного асинхронного двигателя. При Z70 в случае колебательного характера сигнала невязки 6 (п) (фиг. Зд, е, ж), вызванного нелинейностью типа люфт или увеличением величины напряжения источника 9 постоянного напряжения, величина момента, соответствующая 1 ед. млад- щего разряда управляющего кода, пре- вьшает требуемое качество эталонной характеристики значение. На втором
выходе блока 12 формируется 1, вычитаемая из содержимого реверсивного счетчика 13. Это приводит к уменьшению значения делителя частоты, поступающего с реверсивного счетчика 13 на первый вход элемента 2И-ИЛИ 18 и проходящего через него на второй вход управляемого делителя 11 частоты в случае уровня 1 (vX(n) 0) на выходе элемента НЕ 17, В результате частота импульсов генератора 10 повышенной частоты, пЪступающих на первый вход управляемого делителя 11 частоты, делится последним на уменьшенный делитель и возврастает результирующее значение несущей частоты сигнальньтх импульсов питания с первого и второго выходов блока 2 управления соответственно для обмот-. ки управления и возбуждения двухфазного асинхронного двигателя. В соответствии с графиком (фиг. 2) момент на валу двухфазного асинхронного двигателя уменьшается, что приводит к снятию исходных колебаний сигнала невязки Q (п).
5
0
5
0
5
При
Z,0
в случае смещенного характера сигнала невязки б (п) (фиг. За, б, в, г), вызванного, например, уменьшением величины напряжения источника 9 постоянного напряжения или увеличением возмущающих моментов на валу нагрузки, крутизна моментной характеристики недостаточно велика. На первом входе блока 12 вырабатывается 1 и производится, наоборот, увеличение на единицу содержимого реверсивного счетчика 13. Это приводит к уменьшению несущей частоты питания, з еличе- нию момента на валу двухфазного асинхронного двигателя и устранению исход- ной невязки.
При ZQ О в случае допустимой формы невязки 0(п) (фиг. 4) на первом и втором выходах блока 12 вырабатываются сигналы О, содержимое реверсивного счетчика 13 и значение несущей не изменяются
В слзгчае отличия квантованного по уровню значения модуля скорости входного воздействия от нуля (VX(n))b1, на выходе элемента ИЛИ 16 формируется сигнал 1, инвертируемый элементом НЕ 17 и запрещающий через вход разрешения счета реверсивного счетчика 13 изменение его содержимого. Сигнал О с выхода элемента НЕ 17 поступает на второй вход элемента 2ИИЛИ 18 и запрещает прохождение инфор- мадии от реверсивного счетчика на второй вход управляемого делителя 11 частоты. Через третий вход элемента 2И-ИЛИ 18 разрешается прохождение информации от первого регистра 14 намя- ти, в котором записан постоянный делитель, обеспечивающий на выходе управляемого делителя частоты им-, пульсный сигнал номинальной частоты. В ЭТ.ОМ случае движение системы ществляется при постоянной .несущей частоте .исполнительного двузсфазного асинхронного двигателя н в соответствии с фиг, 2 не происходит изменение добротности, а следовательЯо, и динамической точности системы.
Таким образом, путем настройки несущей частоты напряжения питания двз фазного асинхронного двигателя по результатам анализа логической частью системы типа входного воздействия и Д1гаамического рассогласова ния выходных сигналов эталонной моде лн и реальной системы при отработке ступенчатого и синусоидального воздействий производится изменение кру тиэны моментной характеристики ис- полнительного элемента. Это придает системе свойство адаптации и измене- ние произвольных видов условий эксплуатации не только при стзгпенчатом, но и синусоидальном входном воздейст BHHj пто расширяет функциональные возможности цифровой самонастраиваю щейся следящей системы по сравнению с известной.
Формула изобретен и я
Цифровая самонастраивакщаяся еле- дящая система содержащая первый сумматор, первый регистр памяти,, последовательно соединенные генератор повьденной частоты и управляемый
0
Q
5
0
5
делитель частоты, реверсивный счетчик, подключенньй входами прямого и обратного счета соответственно к первому и второму выходам блока управления реверсивньш счетчиком, второй сумматор, соединенный первым входом с входом системы, первым входом третьего сумматора и через второй регистр памяти с вторым входом третьего сумматора, второй вход второго сумматора подключен к выходу датчика обратной связи, а выход - к первому входу блока з равления, вый и второй выходы .которого соедине- ньг с информационными входами соответственно первого и второго импульсных усилителей, подключенных входами опорного напряжения к выходу источника . постоянного напряжения, а выходами - соответственно к обмотке jrnpaB- леиия и обмотке возбуждения двухфазного асинхронного двигателя, вал ко торого соединен с валом датчика обратной связи, отличающая- с я тем, что, с целью повышения точности, введены эталонная модель, элемент НЕ, элемент 2И-И1Ш элемент Ш1И, подключенный входами к выходам третьего сумматора, а выходом - к входу,элемента НЕ, первый вход элемента 2И-ЙЛИ соединен с выходом реверсивного счетчика, второй вход - с выходом элемента НЕ и входом разрешения счета реверсивного счетчика, третий вход с выходом первого регистра памяти, четвертый вход - с входом элемента НЕ, а выход - с входом управления управляемого делителя частоты, подключенного выходом к второму входу блока управления, первый вход второго сумматора через эталоя- ную модель соединен с первым входом первого сумматора, подключенного вто- рьм входом к второму входу второго .сумматора.
9
Kg
| Самонастраивающаяся система управления | 1980 |
|
SU935875A1 |
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Авторское свидетельство СССР № 1206751, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
