Г2
| название | год | авторы | номер документа |
|---|---|---|---|
| Цифровой электропривод | 1982 |
|
SU1050077A1 |
| Устройство для цифровой записи и воспроизведения звуковых сигналов | 1986 |
|
SU1411816A1 |
| Система управления многоканальнымэлЕКТРОпРиВОдОМ РОбОТА | 1979 |
|
SU805246A1 |
| Способ управления электроприводом лифта с двухскоростным асинхронным электродвигателем и устройство для его осуществления | 1985 |
|
SU1307528A1 |
| Многоканальное устройство для регистрации информации | 1984 |
|
SU1236452A1 |
| Устройство для регулирования скорости электродвигателя | 1984 |
|
SU1267375A1 |
| Генераторная установка электроразведочной станции | 1990 |
|
SU1728828A1 |
| Цифровой электропривод | 1983 |
|
SU1102002A1 |
| ПРЕОБРАЗОВАТЕЛЬ ИНЕРЦИАЛЬНОЙ ИНФОРМАЦИИ | 2006 |
|
RU2325620C2 |
| Следящая система | 1987 |
|
SU1631513A1 |
Изобретение относится к электротехнике и может быть использовано для импульсного управления исполнительными асинхронными электродвигателями малой мощности следящих систем. Целью изобретения является повышение стабильности частоты вращения электродвигателя и плавности регулирования. Устройство для управления двухфазным асинхронным двигателем содержит управляемый ключ 1 переменного тока, управляемый выпрямитель 2 с блоком 3 формирования сигналов управления, ключ 4 постоянного тока, формирователь 6 тактовых импульсов, делитель 7 частоты, усилители 9,10, управляемые ключи 11 и 13, сдвиговый регистр 12, сумматор 14, буферный усилитель 15, блок 5 управления. При реализуемом в устройстве импульсном управлении средняя частота вращения двигателя в установившемся режиме зависит не только от постоянных времени в период разгона и торможения и от заполнения периода импульсного управляющего сигнала, но и от структуры сигнала. При одинаковых постоянных времени разгона и торможения двигателя устройство обеспечивает 33 ступени регулирования при восьми разрядном управляющем коде. 4 ил., 1 табл.
Фи9.1
литель 7 частоты, усилители 9, 10, управляемые ключи 11 и 13, сдвиговый регистр 12, сумматор 14, буферный усилитель 15, блок 5 управления. При реализуемом в устройстве импульсном управлении средняя частота вращения двигателя в установившемся режиме зависит не только от постоянных вреИзобретение относится к электротехнике и может быть использовано для импульсного управления исполнительными асинхронными электродвигателями малой мощности следящих систем.
Цель изобретния - повышение ста- бильности частоты вращения электродвигателя и плавности регулирования.
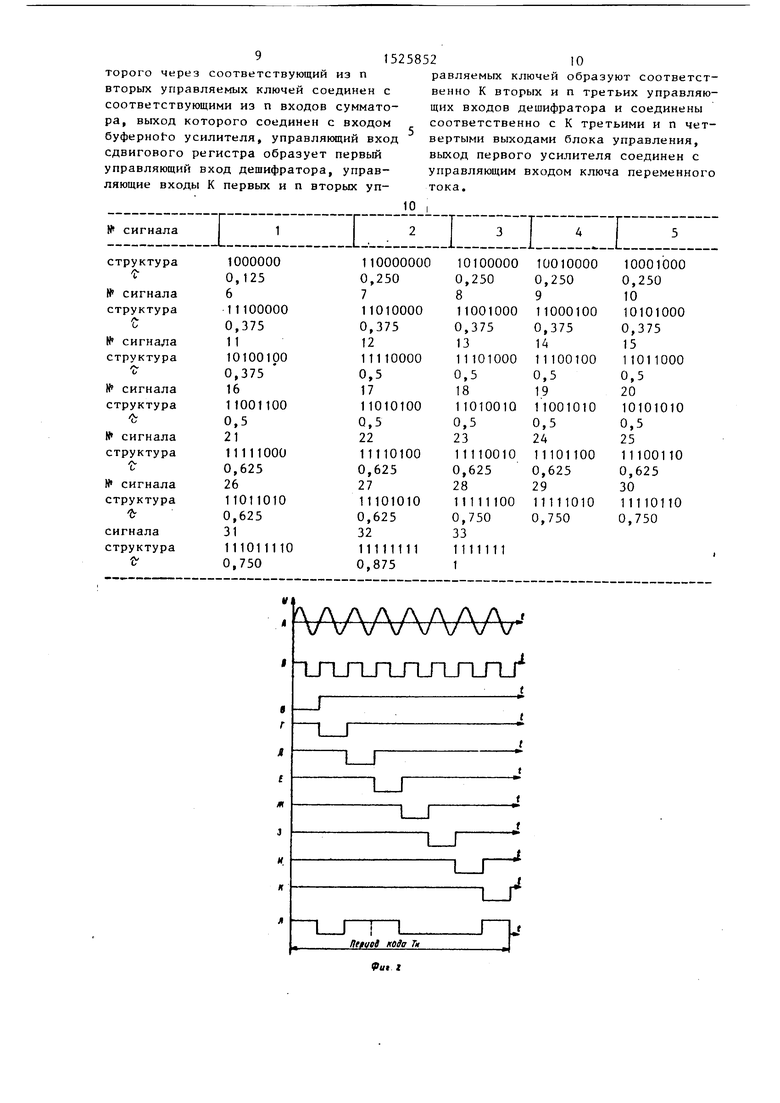
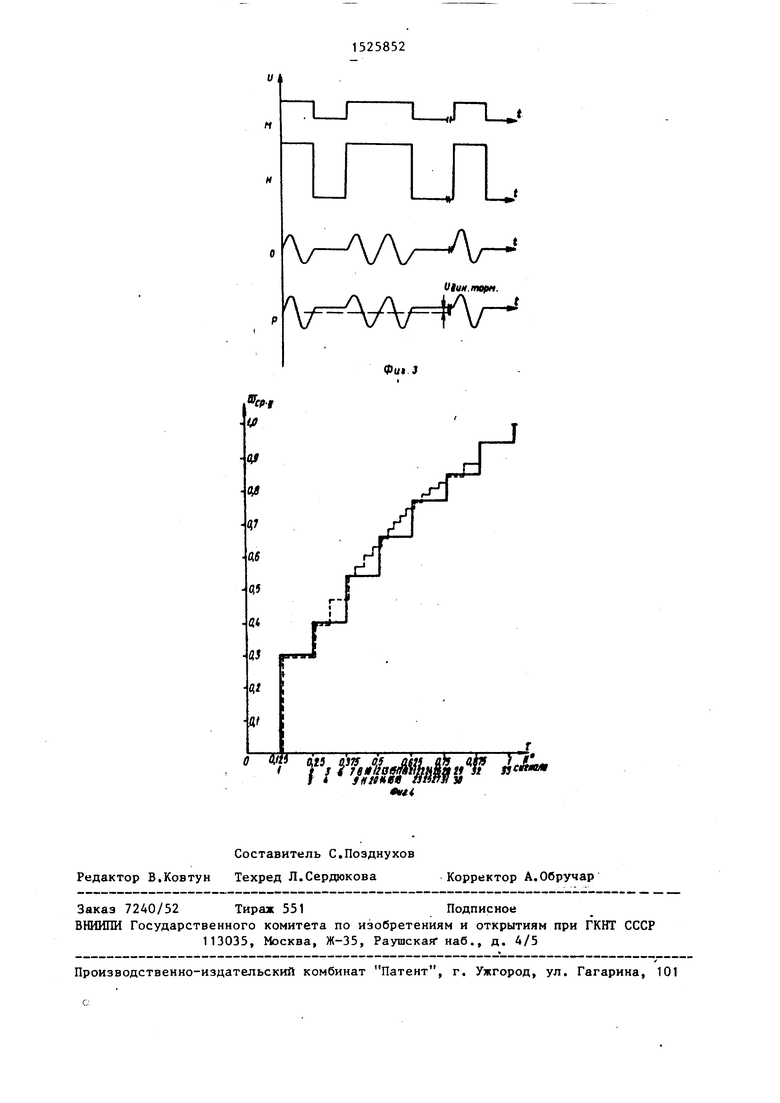
На фиг. 1 приведена структурная схема устройства; на фиг. 2, 3 - временные диаграммы, поясняющие его ра- боту; на фиг. 4 - регулировочная характеристика электродвигателя.
Устройство для управления двухфазным асинхронным электродвигателем содержит управляемый ключ 1 перемен- ного тока, управляемый выпрямитель 2 с блоком 3 формирования сигналов управления, управляемый ключ 4 постоянного тока, блок 5 управления, формирователь 6 тактовых импульсов, дели- тель 7 частоты, дешифратор 8, первый и второй усилители 9, 10. Дешифратор 8 составлен из К первых управляемых ключей 11, сдвигового регистра 12 й- п выходами, п вторых управляемых клю- чей 13, сумматора 14 с п входами и буферного усилителя 15, выход которого образует выход дешифратора 8. Вход управляемого ключа 1 переменного тока предназначен для подключения к пи- тающей сети, а его выход - для подключения к обмотке 16 управления электродвигателя 17. Вход управляемого выпрямителя 2 предназначен для подключения к питающей сети,- а выход через управляемый ключ 4 постоянного тока - к обмотке 16 управления электродвигателя 17. Вход формирователя 6 тактовых импульсов предназначен для подключения к питающей сети, выход формирователя 6 тактовых импульсов соединен со входом делителя 7 частоты, выполненного с К каскадами деления. Каждый из К выходов делителя 7 час-
мени в период разгона и торможения и от заполнения периода импульсного управляющего сигнала, но и от структуры сигнала. При одинаковых постоянных времени разгона и торможения двигателя устройство обеспечивает 33 ступени регулирования при восьмиразрядном управляющем коде. 4 ил., 1 табл.
Q 0 Q
5
тоты соединен с соответствующими из К информационных входов дешифратора В, образованных первыми выводами К первых управляемых ключей 11, вторые выводы которых объединены и соединены с информационным входом сдвигового регистра 12, управляющий вход которого образует первый управляющий вход дешифратора 8. Каждый из л выходов сдвигового регистра 12 через соответствующий из п вторых управляемых ключей 13 соединен с соответствующими из п входов сумматора 14, выход которого соединен с входом буферного усилителя 15. Выход дешифратора 8 через усилитель 9 соединен с управляющим входом ключа 1 переменного тока и с входом второго усилителя 10, выход которого подключен к управляющему входу ключа 4 постоянного тока. Управляющие входы К первых и п вторых управляемых ключей 11, 13 образуют соответственно К вторых и п третьих управляющих входов дешифратора 8, Вход блока 3 формирования сигналов управления, первый управляющий К вторых управляющих и п третьих управляющих входы дешифратора соединены с соответствующими выходами блока 5 управления. Блок 5 управления может быть выполнен в виде датчика 18 частоты вращения, блоков 19 и 20 дифференцирования и интегрирования, аналого-цифрового преобразователя 21, цифрового процессора 22 и блока 23 распределения и усиления сигналов управления, выходы которого образуют выходы блока 5 управления.
U
Устройство для управления двухфаз-
ным асинхронным электродвигателем работает- следующим образом.
Напряжение питающей сети (кривая А на фиг. 2) подается на вход формирователя 6 тактовых импульсов, на вход управляемого ключа 1 переменного тока
н на вход управляемого выпрямителя 2. Формирователь 6 тактовых импульсов с помощью содержащегося в нем нуль-органа вырабатывает последовательность тактовых прямоугольных импульсов (кривая Б на фиг. 2), которые поступают на делитель частоты 7, содержащий несколько (К) каскадов деления (например 1:1, 1:2, 1:4, 1:8), а затем че- рез первые управляемые ключи 11, управляемые цифровым процессором 22 через блок 23 распределения и усиления сигналов на информационный вход сдвигающего резистора 12, Сдвигающий ре- 15 сигнала управления, управляемого цифгистр 12 обеспечивает на каждом из своих п выходов, подсоединенных к п вторым управляемым ключом 13, получение отрицательных импульсов напряжения, сдвинутых друг относительно дру- 20 при слабых возм щающих воздействия
га на период следования трактовых прямоугольных импульсов (кривые В-К, на фиг, 2). Для представления управляющего сигнала в двоичной форме, а следовательно, удобства сопряжения дешифратора 8 с цифровым процессором 22 отрицательные прямоугольные импульсы со сдвигающего регистра 12, через п вторых ключей 13, управляемую цифровым процессором 22, через блок 23 распределения и усиления сигналов поступают на сумматор 14, на выходе которого формируется периодически повторяющаяся последовательность прямоугольных импульсов, структура которой определяется последовательностью подключения входов сумматора 14 к выходам сдвигового регистра 12 через вторые управляемые ключи 13 (кривая
Л, на фиг, 2), Сформированный импульс- д обеспечивается с помощью блока 20 ный сигнал поступает на буферный уси- интегрирования,.выходной сигнал кото- литель 15, обеспечивающий работу де- рого поступает на цход цифрового про- шифратора 8 на низкоомную нагрузку, цессора 22 для обработки и формиро- Следящий сигнал с буферного усилителя 15 (кривая М, фиг. 3) поступает на Вход первого усилителя 9, который
45
вания соответствующих команд.
Конкретный алгоритм работы устройства, обеспечивается соответствующей программой, заложеной в цифровой процессор, и может изменяться путем перепрограммирования последнего.
усиливает сигнал, не меняя его формы (кривая II, фиг. 3) для падежной работы управляемого ключа 1 nepeMeinioro тока, включенного последовательно с обмоткой управления 16 исполнительного двигателя 17. Напряжение на выходе управляемого ключа 1 переменного тока (на обмотке управления 16 исполнительного двигателя 17) имеет пре- рьшисто-синусоидальиую форму (кривая О, фиг. 3). Для обеспечения режима дина№1ческого торможения двигателя 17 в паузах на обмотку управления 16
через управляемый ключ 4 постоянного тока подается кусочно-постоянное напряжение с выхода управляемого выпрямителя 2 (кривая Р, фиг, 3). Надежная работа управляемого ключа 4 постоянного тока обеспечивается вторым усилителем 10, на вход которого поступает сигнал с первого усилителя 9 (кривая И, фиг, 3). Изменение величины выходного постоянного напряжения управляемого выпрямителя 2 для динамического торможения производится с помощью блока 3 формирования
ровым процессором 22 через блок 23 распределения и усиления сигналов.
Одним из вариантов обеспечения режима стабилизации частоты вращения
является сравнение выходного сигнала датчика частоты вращения 8 с некоторым заданным (эталонным) значением с помощью цифрового процессора 22 и 5 формирование соответствующего данной частоте вращения кодо-импульсного набора участков синусоидального и постоянного напряжения питания обмотки управления 16 (например, кривая Р, фиг. 3), Улучщеиие качества переходных процессов по скорости двигателя при сильных возмущениях обеспечивается при использовании в блоке 5 управления обратной связи по производной от частоты вращения, формируемой на выходе блока 19 дифференцирования Программное торможение (остановка) двигателя 17 в соответствии с заданным угловым перемещением его вала
0
5
обеспечивается с помощью блока 20 интегрирования,.выходной сигнал кото- рого поступает на цход цифрового про- цессора 22 для обработки и формиро-
вания соответствующих команд.
Конкретный алгоритм работы устройства, обеспечивается соответствующей программой, заложеной в цифровой процессор, и может изменяться путем перепрограммирования последнего.
Возможны другие варианты построения цепей обратной связи по скорости, ускорению и положению вала двигателя, например, на основе импульсного датчика скорости, который можно непосредственно сопрягать с цифровым процессором 22 без промежуточ 1ого аналого- цифрового преобразователя 21.
В данном устройстве управления синхронным двигателем по сравнению
с прототипом достигается увеличение плавности регулирования и стабильности частоты вращения вала двигателя. Это объясняется тем, что при описаном импульсном управлении средняя скорость в установившемся режиме зависит не только от постоянных времени в периоды разгона и торможения двигателя и от заполнения периода импульсного УПравляющего сигнала, как в прототипе, Но и от структуры сигнала.
Соотношение между периодом напряжения двигателя Т и периодом импульсного управляющего сигнала кода Т, при котором обеспечивается удобное сопряжение с ЭВМ, определяется выражением
Т J. к i ,
где 1 - целое число.
Реализация преимуществ предлагаемого импульсного управления по сравнению с прототипом обеспечивается при значениях , минимальным из которых является ,т.е,Ту. 8Т.
При таком соотношении и одинаковых постоянных времени в периоды разгона и торможения двигателя 17 устройство обеспечивает 33 ступени регулирования, так как при одном и том же запол нении средняя частота вращения определяется еще и структурой импульсного управляющего сигнала,
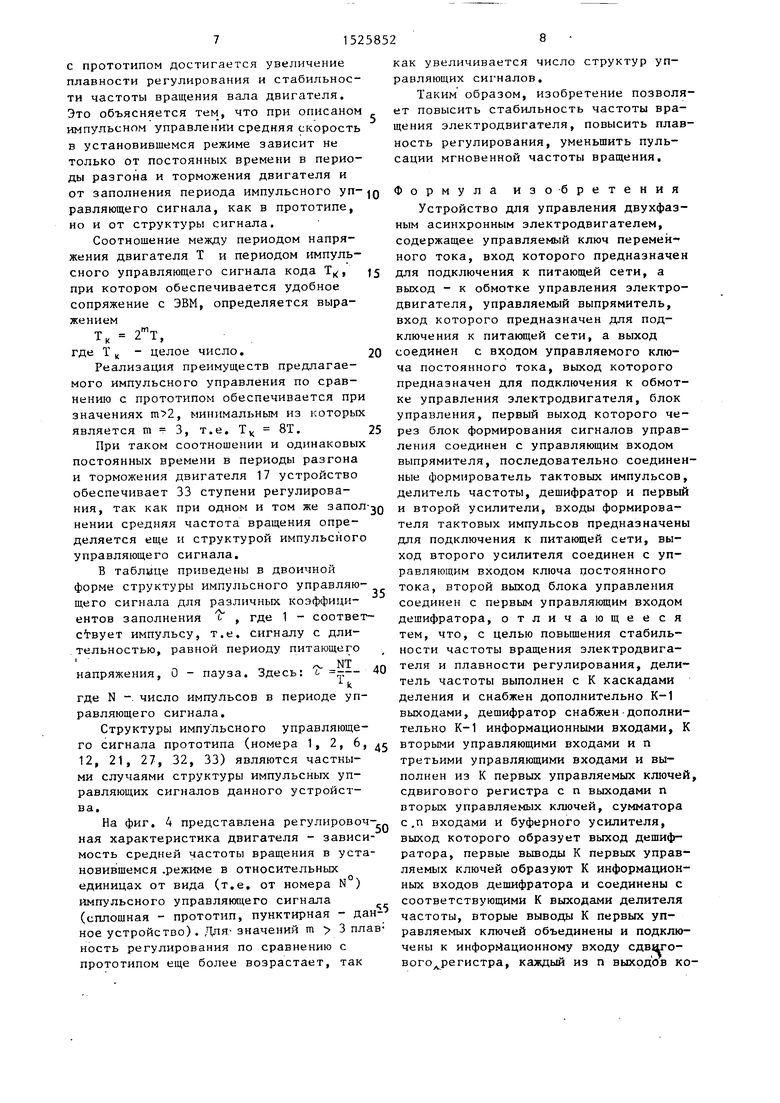
В таблице приведены в двоичной форме структуры импульсного управляющего сигнала для различных коэффициентов заполнения (- , где 1 - соответствует импульсу, т.е. сигналу с длительностью, равной периоду питающего
- NT напряжения, О - пауза. Здесь: - --
k
где N -. число импульсов в периоде управляющего сигнала.
Структуры импульсного управляющего сигнала прототипа (номера 1, 2, 6, 12, 21, 27, 32, 33) являются частными случаями структуры импульсных управляющих сигналов данного устройства.
На фиг. 4 представлена регулировоч-,
нал характеристика двигателя - зависимость средней частоты вращения в установившемся .режиме в относительных единицах от вида (т.е. от номера N ) импульсного управляющего сигнала (сплошная - прототип, пунктирная - дан кое устройство). ,Тля- значений m 3 плав- ность регулирования по сравнению с прототипом еще более возрастает, так
,i5
как увеличивается число структур управляющих сигналов.
Таким образом, изобретение позволяет повысить стабильность частоты вращения электродвигателя, повысить плавность регулирования, уменьшить пульсации мгновенной частоты вращения.
Формула изобретения
Устройство для управления двухфазным асинхронным электродвигателем, содержащее управляемый ключ переменного тока, вход которого предназначен для подключения к питающей сети, а выход - к обмотке управления электродвигателя, управляемый выпрямитель, вход которого предназначен для подключения к питающей сети, а выход соединен с входом управляемого ключа постоянного тока, выход которого предназначен для подключения к обмотке управления электродвигателя, блок управления, первый выход которого через блок формирования сигналов управления соединен с управляющим входом выпрямителя, последовательно соединенные формирователь тактовых импульсов, делитель частоты, дешифратор и первый и второй усилители, входы формирователя тактовых импульсов предназначены для подключения к питающей сети, выход второго усилителя соединен с управляющим входом ключа постоянного тока, второй выход блока управления соединен с первым управляющим входом дешифратора, отличающее ся тем, что, с целью повышения стабильности частоты вращения электродвигателя и плавности регулирования, делитель частоты выполнен с К каскадами деления и снабжен дополнительно К-1 выходами, дешифратор снабжен-дополнительно К-1 информационными входами, К вторыми управляющими входами и п третьими управляющими входами и выполнен из К первых управляемых ключей, сдвигового регистра с п выходами п вторых управляемых ключей, сумматора с.п входами и буферного усилителя, выход которого образует выход дешифратора, первые выводы К первых управляемых ключей образуют К информационных входов дешифратора и соединены с соответствующими К выходами делителя частоты, вторые выводы К первых управляемых ключей объединены и подключены к информационному входу сдвиго- вого регистра, каждый из п выходов которого через соответствующий из п вторых управляемых ключей соединен с соответстоующими из п входов сумматора, выход которого соединен с входом бyфepнo o усилителя, управляющий вход сдвигового регистра образует первый управляющий вход дешифратора, управляющие входы К первых и п вторых уп
585210
равляемых ключей образуют соответственно К вторых и п третьих управляющих входов дешифратора и соединены соответственно с К третьими и п четвертыми выходами блока управления, выход первого усилителя соединен с управляющим входом ключа переменного тока.
...
J
(1ЙГ
гз й1 O.S
/ /(
г/
4luH.moftH.
л
Л1
«г/
| Мейстель A.M., Найдис В.А., Херсонский Ю.И | |||
| Комплектные тиристор- ные устройства для управления асинхронными электроприводами | |||
| М.: Энергия, 1971, с.43 | |||
| ВСЕСОЮЗНАЯ | 0 |
|
SU365789A1 |
