1284
лена на основании 1, вторая - на корпусе последующего звена, при этом последующие нечетные зубчатые рейки 7 и 9 предназначены для кинематической связи в уравнительном механизме и вьтолнены свободно установленными, а четные зубчатые рейки 8 и 10 кине
1
Изобретение относится к машиностроению, а именно к манипуляторам для механизации и автоматизации технологических процессов, содержащих подъемно-транспортные и другие операции.
Цель изобретения - повышение жесткости конструкции и грузоподъемности за счет использования зубчато- реечных передач.
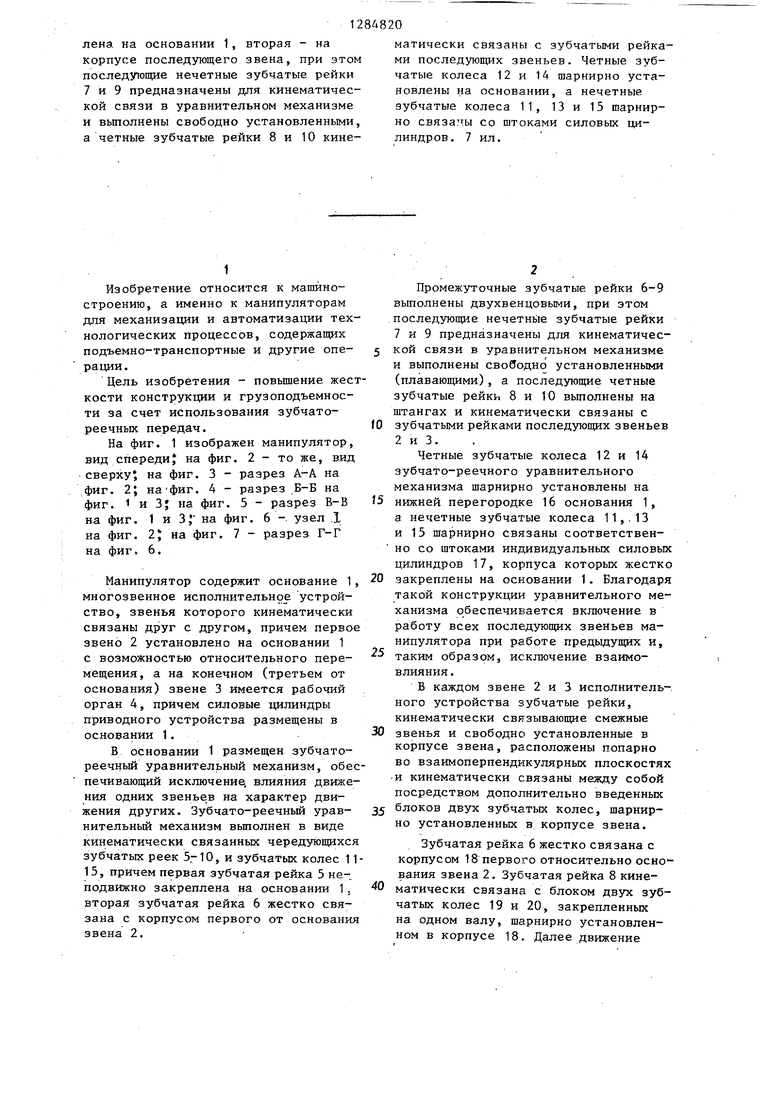
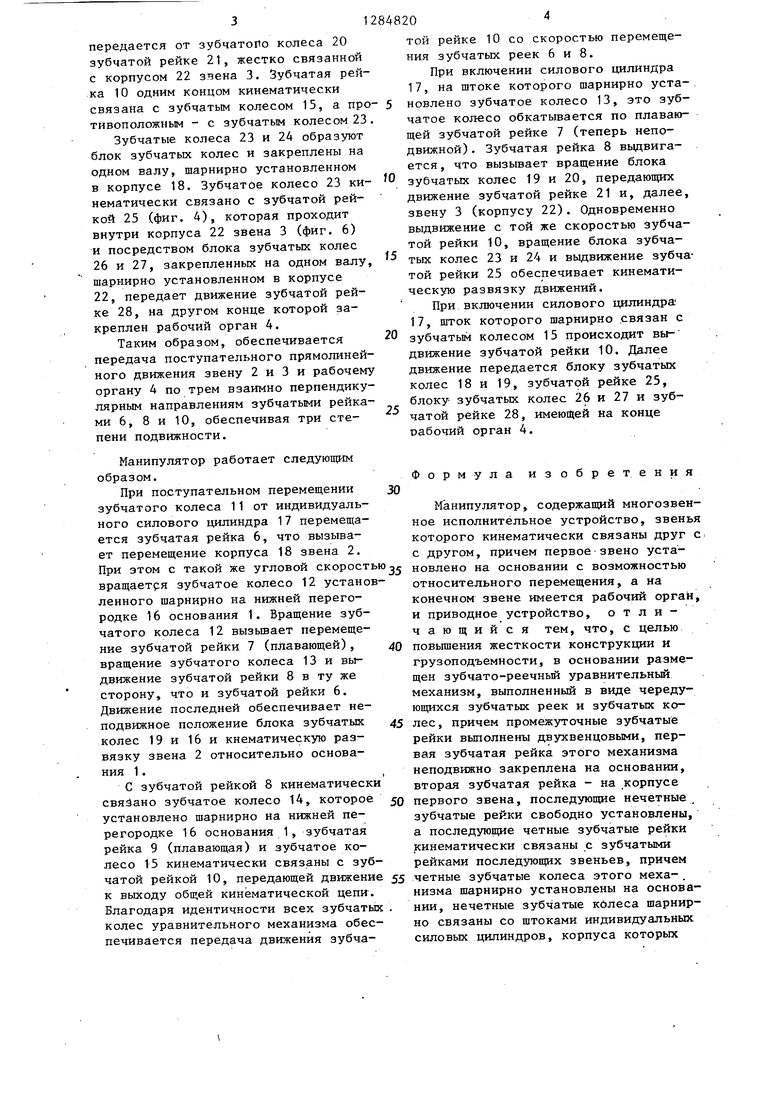
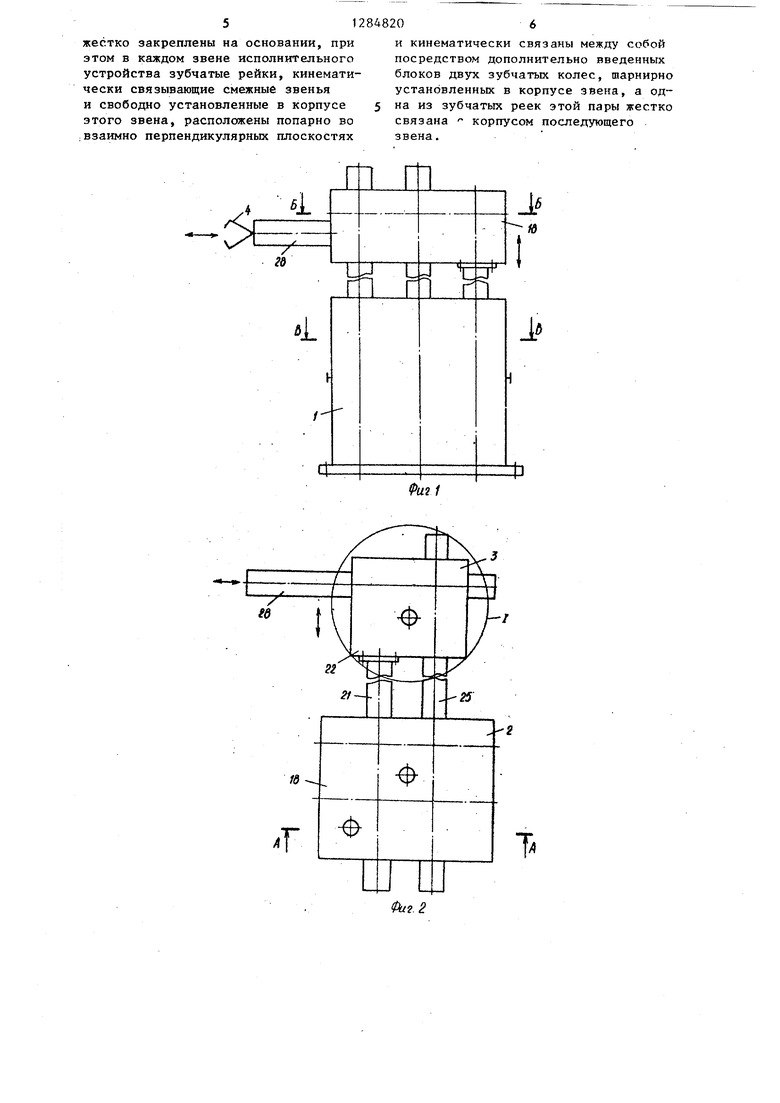
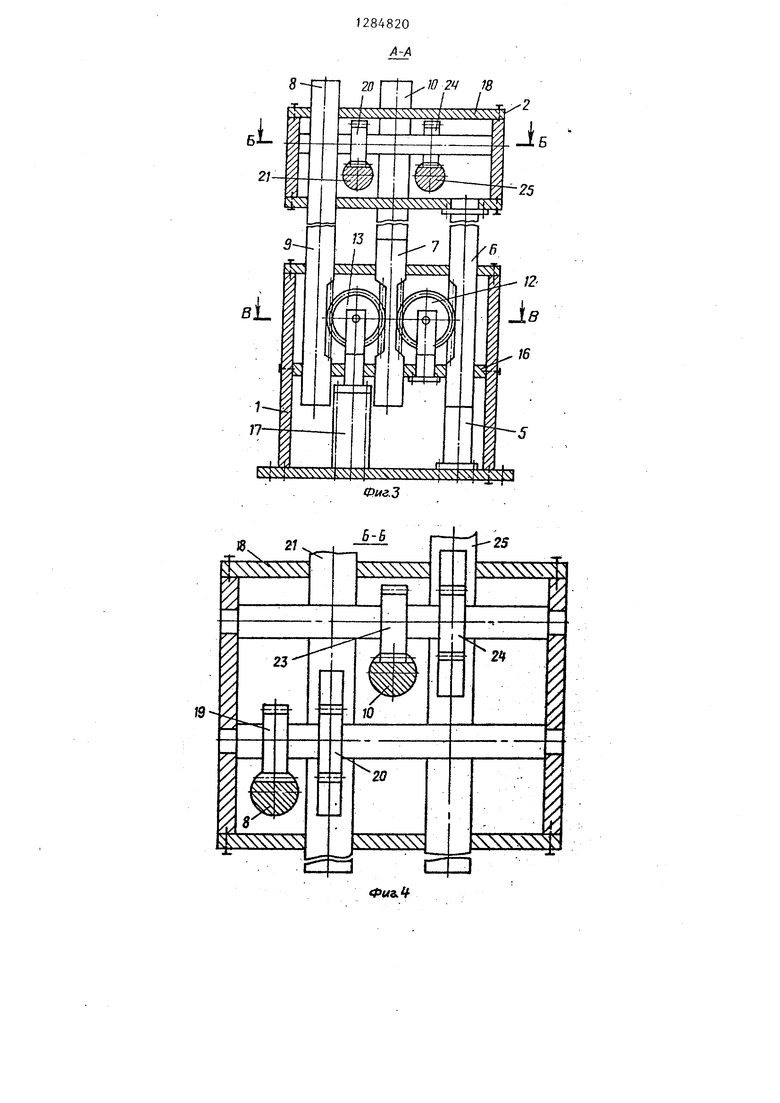
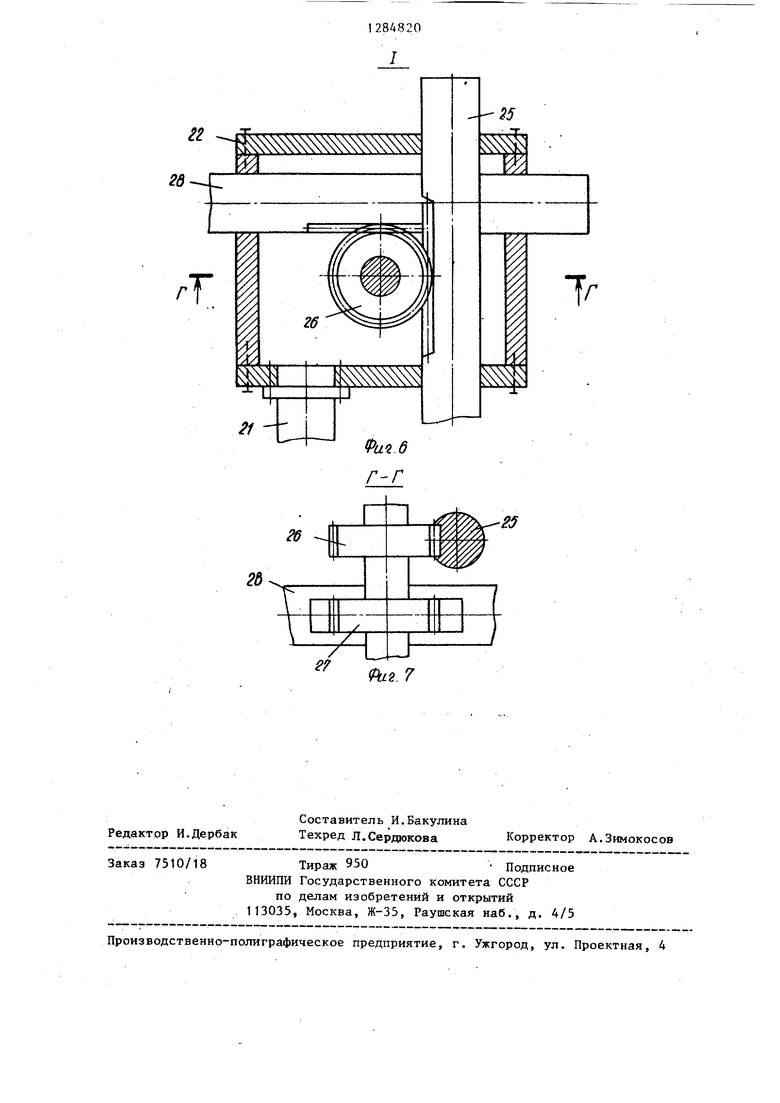
На фиг. 1 изображен манипулятор, вид спередиJ на фиг, 2 - то же, вид сверху на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез .Б-Б на фиг, 1 и З; на фиг. 5 - разрез В-В на фиг. 1 и на фиг. 6 -. узел J на фиг. 2J на фиг. 7 - разрез Г-Г на фиг, 6,
Манипулятор содержит основание 1, многозвенное исполнительное устройство, звенья которого кинематически связаны друг с другом, причем первое звено 2 установлено на основании 1 с возможностью относительного перемещения, а на конечном (третьем от основания) звене 3 имеется рабочий орган 4, причем силовые цилиндры приводного устройства размещены в основании 1.
В основании 1 размещен зубчато- реечный уравнительный механизм, обеспечивающий исключение, влияния движения одних звеньев на характер движения других. Зубчато-реечньш уравнительный механизм выполнен в виде кинематически связанных чередующихся зубчатых реек 5-10, и зубчатых колес 11 15, причем первая зубчатая рейка 5 не- подвижно закреплена на основании 1. вторая зубчатая рейка 6 жестко связана с корпусом первого от основания звена 2.
матически связаны с зубчатыми рейками последующих звеньев. Четные зубчатые колеса 12 и 14 шарнирно установлены на основании, а нечетные зубчатые колеса 11, 13 и 15 шарнирно связат ы со штоками силовых цилиндров. 7 ил.
Промежуточные зубчатые рейки 6-9 выполнены двухвенцовыми, при этом последующие нечетные зубчатые рейки 7 и 9 предназначены для кинематической связи в уравнительном механизме и выполнены свободно установленными (плавающими), а последующие четные зубчатые рейки 8 и 10 вьтолнены на штангах и кинематически связаны с зубчатыми рейками последующих звеньев 2 и 3.
Четные зубчатые колеса 12 и 14 зубчато-реечного уравнительного механизма шарнирно установлены на
5 нижней перегородке 16 основания 1, а нечетные зубчатые колеса 11,. 13 и 15 шарнирно связаны соответствен- но со штоками индивидуальных силовых цилиндров 17, корпуса которых жестко
0 закреплены на основании 1. Благодаря такой конструкции уравнительного механизма обеспечивается включение в работу всех последующих звеньев манипулятора при работе предьщущих и,
5 таким образом, исключение взаимовлияния ,
В каждом звене 2 и 3 исполнитель-, ного устройства зубчатые рейки, кинематически связывающие смежные звенья и свободно установленные в корпусе звена, расположены попарно во взаимоперпендикулярных плоскостях и кинематически связаны между собой посредством дополнительно введенных
блоков двух зубчатых колес, шарнирно установленных в корпусе звена.
Зубчатая рейка 6 жестко связана с корпусом 18 первого относительно вания звена 2. Зубчатая рейка 8 кинематически связана с блоком двух зубчатых колес 19 и 20, закрепленных на одном валу, шарнирно установленном в корпусе 18. Далее движение
0
0
передается от зубчатот о колеса 20 зубчатой рейке 21, жестко связанной с корпусом 22 звена 3. Зубчатая рейка 10 одним концом кинематически связана с зубчатым колесом 15, а противоположным - с зубчатым колесом 23
Зубчатые колеса 23 и 24 образуют блок зубчатых колес и закреплены на одном валу, шарнирно установленном в корпусе 18. Зубчатое колесо 23 кинематически связано с зубчатой рейкой 25 (фиг. 4), которая проходит внутри корпуса 22 звена 3 (фиг. 6) и посредством блока зубчатых колес 26 и 27, закрепленных на одном валу шарнирно установленном в корпусе 22, передает движение зубчатой рейке 28, на другом конце которой закреплен рабочий орган 4.
Таким образом, обеспечивается передача поступательного прямолинейного движения звену 2 и 3 и рабочему органу 4 по трем взаимно перпендикулярным направлениям зубчатыми рейками 6, 8 и 10, обеспечивая три степени подвижности.
Манипулятор работает следующим образом.
При поступательном перемещении зубчатого колеса 11 от индивидуального силового цилиндра 17 перемещается зубчатая рейка 6, что вызывает перемещение корпуса 18 звена 2. При этом с такой же угловой скорость вращаетря зубчатое колесо 12 установленного щарнирно на нижней перегородке 16 основания 1. Вращение зубчатого колеса 12 вызьшает перемещение зубчатой рейки 7 (плавающей), вращение зубчатого колеса 13 и выдвижение зубчатой рейки 8 в ту же сторону, что и зубчатой рейки 6. Движение последней обеспечивает неподвижное положение блока зубчатых колес 19 и 16 и кнематическую развязку звена 2 относительно основания 1.
С зубчатой рейкой 8 кинематически связано зубчатое колесо 14, которое установлено щарнирно на нижней перегородке 16 основания 1, зубчатая рейка 9 (плавающая) и зубчатое колесо 15 кинематически связаны с зубчатой рейкой 10, передающей движение к выходу общей кинематической цепи. Благодаря идентичности всех зубчатых колес уравнительного механизма обеспечивается передача движения зубча.
284820
той рейке 10 со скоростью перемещения зубчатых реек 6 и 8.
При включении силового цилиндра 17, на штоке которого шарнирно уста5 новлено зубчатое колесо 13, это зубчатое колесо обкатывается по плавающей зубчатой рейке 7 (теперь неподвижной) . Зубчатая рейка 8 выдвигается , что вызывает вращение блока
Ш зубчатых колес 19 и 20, передающих движение зубчатой рейке 21 и, далее, звену 3 (корпусу 22). Одновременно выдвижение с той же скоростью зубчатой рейки 10, вращение блока зубча тых колес 23 и 24 и выдвижение зубчатой рейки 25 обеспечивает кинематическую развязку движений.
При включении силового цилиндра: 17, шток которого щарнирно связан с
20 зубчатым колесом 15 происходит выдвижение зубчатой рейки 10. Далее движение передается блоку зубчатых колес 18 и 19, зубчатой рейке 25, блоку зубчатых колес 26 и 27 и зуб25
чатой рейке 28, имеющей на конце рабочий орган 4.
Формула изобретения
Манипулятор, содержащий многозвенное исполнительное устройство, звень которого кинематически связаны друг с другом, причем первое-звено установлено на основании с возможностью относительного перемещения, а на конечном звене имеется рабочий орган и приводное устройство, отличающийся тем, что, с целью повышения жесткости конструкции и грузоподъемности, в основании размещен зубчато-реечный уравнительный механизм, выполненный в виде чередующихся зубчатых реек и зубчатых колес, причем промежуточные зубчатые рейки выполнены двухвенцовыми, первая зубчатая рейка этого механизма неподвижно закреплена на основании, вторая зубчатая рейка - на корпусе первого звена, последующие нечетные зубчатые рейки свободно установлены, а последующие четные зубчатые рейки кинематически связаны с зубчатыми рейками последующих звеньев, причем четные зубчатые колеса этого меха- . низма шарнирно установлены на основании, нечетные зубчатые кйлеса шарнирно связаны со штоками индивидуальных силовых цилиндров, корпуса которых
жестко закреплены на основании, при этом в каждом звене исполнительного устройства зубчатые рейки, кинематически связывающие смежные звенья и свободно установленные в корпусе этого звена, расположены попарно во взаимно перпендикулярных плоскостях
12848206
и кинематически связаны между собой посредством дополнительно введенных блоков двух зубчатых колес, шарнирчо установленных в корпусе звена, а одна из зубчатых реек этой пары жестко связана корпусом последующего звена.
i«
-«
В
гп
4
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1987 |
|
SU1426777A1 |
| Раздвижной подъемник | 1990 |
|
SU1785996A1 |
| Манипулятор модульного типа | 1990 |
|
SU1775289A1 |
| Рука манипулятора | 1981 |
|
SU992180A1 |
| Стан для накатки зубчатых колес | 1989 |
|
SU1613232A1 |
| Автоматический манипулятор | 1980 |
|
SU944918A1 |
| Манипулятор | 1975 |
|
SU529072A1 |
| Манипулятор | 1985 |
|
SU1313691A1 |
| Манипулятор | 1983 |
|
SU1115898A1 |
| Манипулятор | 1985 |
|
SU1269994A1 |
Изобретение относится к машиностроению, а именно к манипуляторам для механизации и автоматизации технологических процессов, содержащих подъемно-транспортные и другие операции. Целью изобретения является повышение жесткости конструкции и грузоподъемности. Манипулятор содержит многозвенное исполнительное устройство, звенья которого кинематически связаны между собой, первое от основания 1 звено установлено на основании с возможностью перемещения, а на конечном звере имеется рабочий орган. В основании размещен зубчато- реечный уравнительный механизм, вьг- полненньй в виде чередующихся зубчатых реек и зубчатых колес. Первая зубчатая рейка 5 неподвижно закреп00 го Фиг.5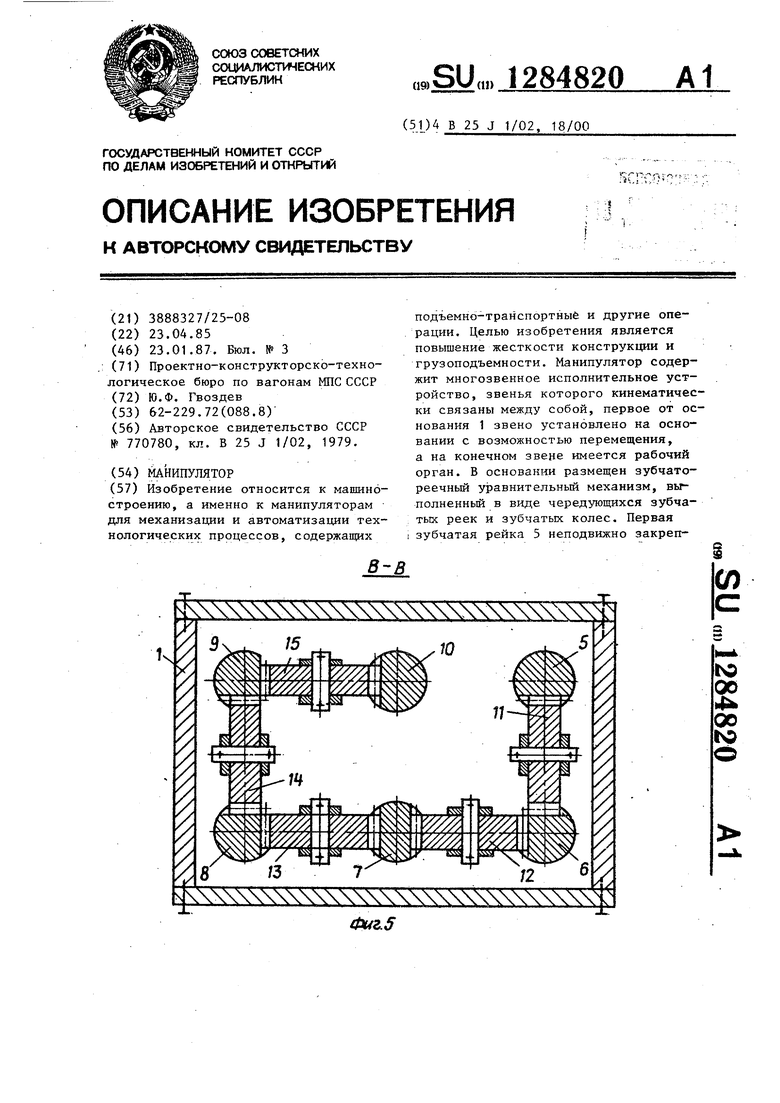
г
| Манипулятор | 1979 |
|
SU770780A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
