Изобретение относится к робототехнике и может быть использовано для механизации и автоматизации технлогических процессов, например для подачи заготовок в зону обработки.
Цель изобретения - повышение жесткости исполнительного органа манипулятора.
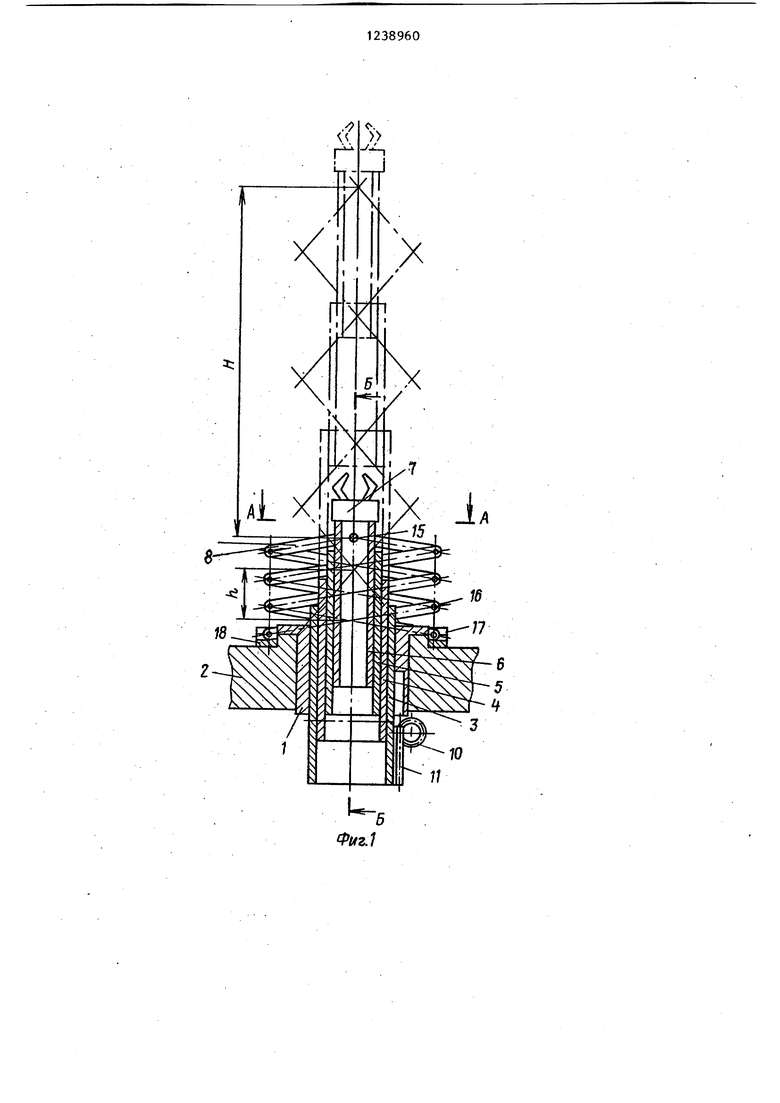
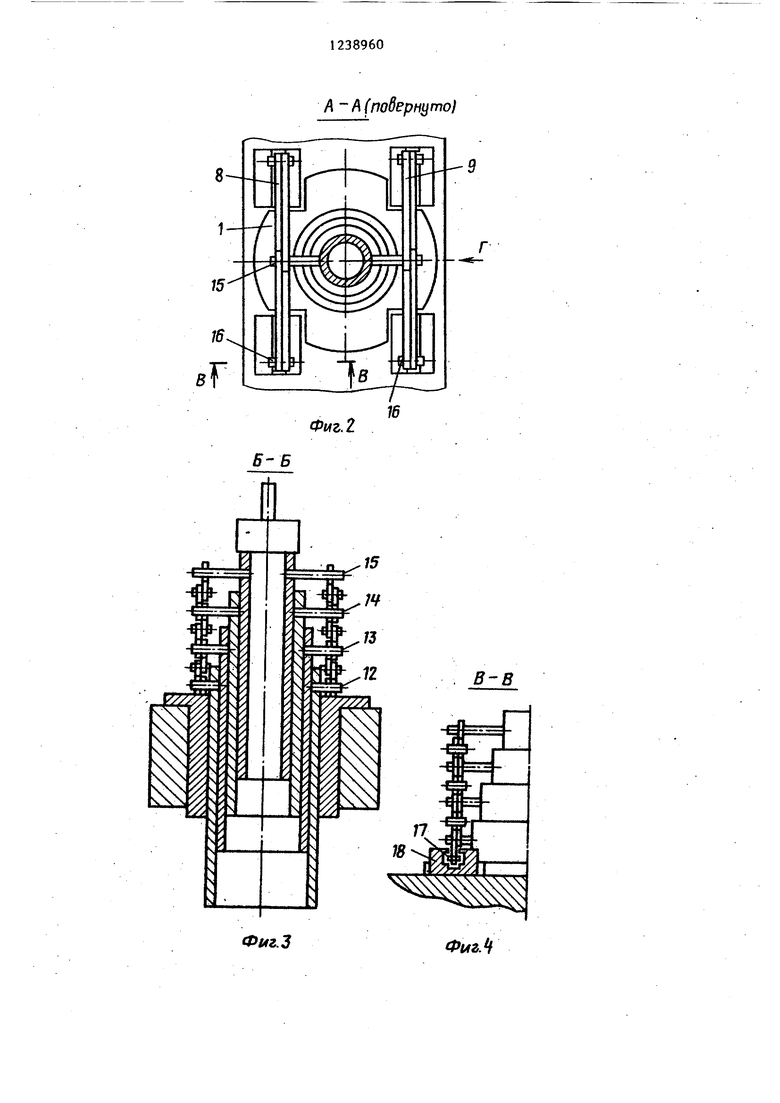
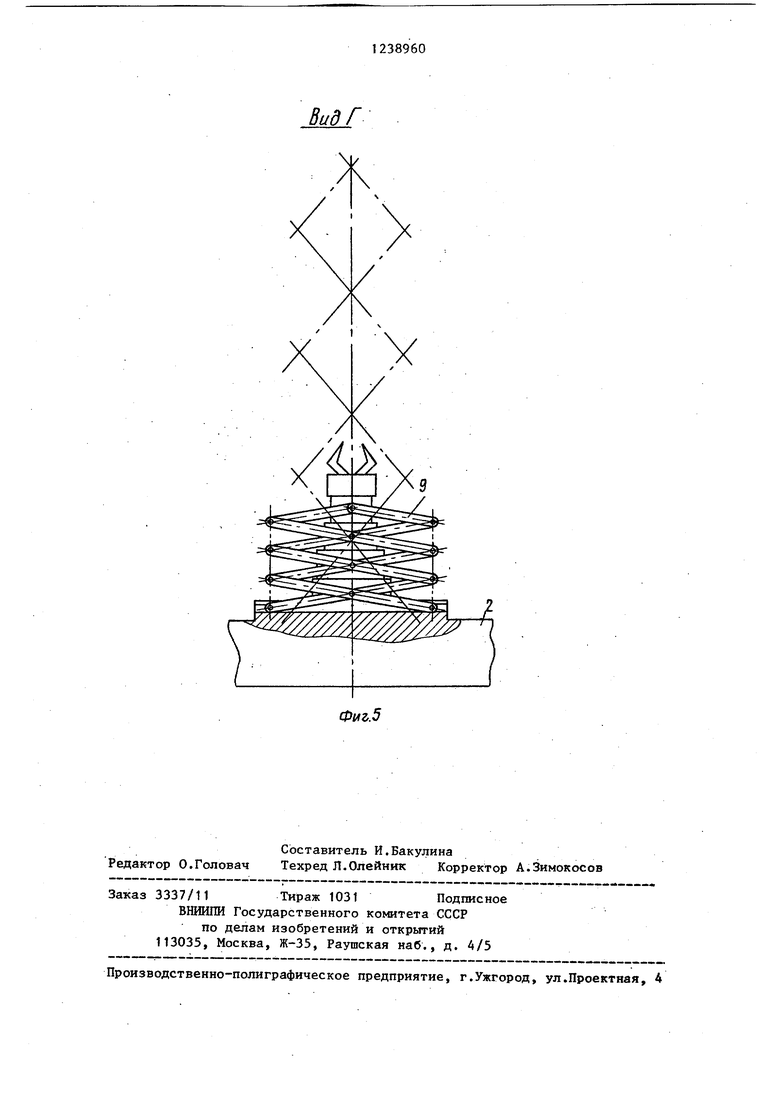
На фиг. 1 изображен исполнительный орган манипулятора, разрез; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - разрез Б-Б на фиг. 1; на фиг. 4 - разрез В-В на фиг. 2; на фиг. 5 - вид Г на фиг. 2.
Исполнительный орган.манипулятора содержит втулку 1, закрепленную в ко пусё 2 манипулятора, многосекционный телескопический механизм, имеющий концёнтрично установленные секции, например втулки 3-6, захватный орган 7, закрепленный на втулке 6. Основной 8 и дополнительный 9 шарнирные многозвенники, привод поступательного перемещения, выполненный в виде зубчато-реечной передачи, зубчатое колесо 10 которой кинематически связано с двигателем (не показан), а рейка 11 жестко закреплена на втулке 3. Внутренние шарниры 12 15 основного 8 и дополнительного 9 шарнирньк многозвенников связаны со- ответ-,а венно с втулками 3 - 6. Наружные шарниры 16 связывают между
5
0
5
0
собой- звенья в основном 8 и дополнительном 9 шарнирньп многозвенниках, первая пара наружных шарниров 17 смонтирована на корпусе 2 с возможностью перемещения по его поверхности в Направляющих 18..
Устройство работает следующим образом.
Движение исполнительному органу манипулятора задается приводом по сту- пательного перемещенияj например шаговым двигателем (не показан), свя занным с зубчатым колесом 10, перемещающим рейку 11, с, втулкой 3, которая, перемещаясь, увлекает за собой средние шарниры 12 - 15 и связанные с ними втулки 4 - 6. Причем перемещение втулки 3 многократно увеличивается. Так, при выбранных соотношениях размеров деталей (фит. 1) перемещение И втулки 6 приблизительно в 7 раз больше перемещения рейки 11,
Управление захватным органом 7 осуществляется автономным приводом (не показан), элементы которого могут быть размещены внутри втулок 3 - 6 многосекционного механизма.
Усилия, действующие на захват 7, через втулки 3-6 передаются на корпус 2 манипулятора, а элементы ;шарнирного многозвенника при этом разгружены, что позволяет повысить жесткость исполнительного органа.
11
/i - Л (побернуто}
Фиг. 2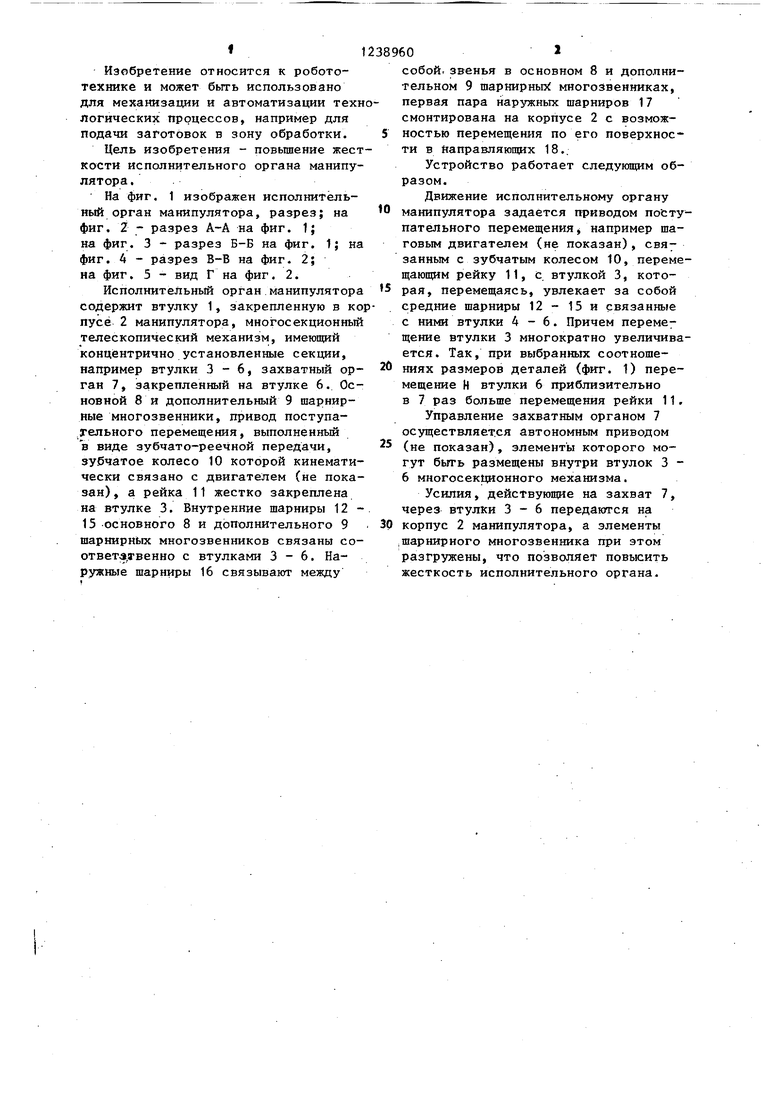
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган манипулятора | 1987 |
|
SU1426777A1 |
| Шпаговый манипулятор | 2018 |
|
RU2691174C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691172C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691170C1 |
| Шпаговый манипулятор | 2018 |
|
RU2691349C1 |
| МАНИПУЛЯТОР | 1992 |
|
RU2022785C1 |
| Автооператор | 1985 |
|
SU1296402A1 |
| Манипулятор | 1972 |
|
SU446411A2 |
| Захватное устройство | 1986 |
|
SU1421530A1 |
| Манипулятор | 1972 |
|
SU441141A1 |
Фиг.З
Фи.
ЬидГ
Ф{лг.5
Редактор О.Головач
Составитель И.Бакулина
Техред Л,Олейник Корректор А.Зимокосов
Заказ 3337/11 Тираж 1031 Подписное ВНИШШ Государственного комитета СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-полиграфическое предприятие, г.Ужгород, ул.Проектная, 4
| Манипулятор | 1981 |
|
SU963847A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
