1
Изобретение относится к машиностроению, а именно к манипуляторам с программнЕлм управлением для автоматизации технологических процессов.
Известен привод манипулятора, содержащий корпус, толкатели с роликами, механизм привода толкателей, подпружиненный относительно корпуса шток и подвижные в направлении перемещения последнего клинья, взаимодействующие со штоком и с роликами толкателей. Механизм привода толкателей выполнен винтовым и един для всех толкателей 1.
Недостатком известного привода является ограниченность его функциональных возможностей вследствие того, что привод обеспечивает циклическое перемещение конечного подвижного элемента-штока на величину, изменение которой на ходу невозможно, а при переналадке трудоемко.
Цель изобретения - расширение функциональныхвозможностей.
Указанная цель достигается тем, что механизм привода толкателей выполнен в виде ряда силовых цилиндров, подвижных относительно корпуса в направлении перемещения штока.
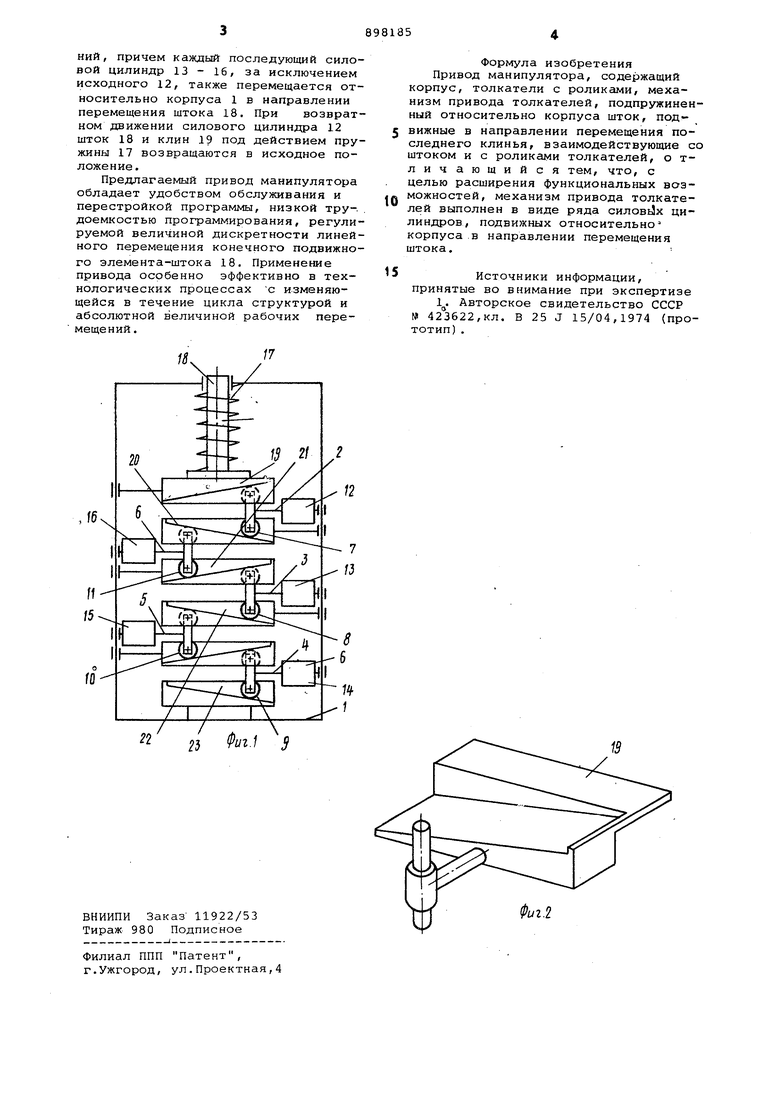
На фиг.1 показана схема привода манипулятора, резрез; на фиг.2 - конструкция клинка.
Привод манипулятора содержит корпус 1, толкатели 2 - 6 с роликами 7 11, механизм привода толкателей, выполненный в виде ряда силовых цилиндров 12 - 16, подпружиненный относительно корпуса 1 пружиной 17 шток 18
10 и подвижные относительно корпуса 1 в направлении перемещения штока 18, клинья 19 - 23, взаимодействующие с , роликами 7-11 толкателей 2 - 6, Шток 18 неподвижно соединен, с кли15ном 19, клин 23 жестко связан с корпусом 1, а силовые цилиндры 12 - 16 выполнены подвижными относительно корпуса 1 в направлении перемещения штока 18.
20
Привод манипулятора работает следующим образом.
Срабатывает силовой цилиндр 12, и толкатель 2 воздействует на ролик 7, который перемещается вдоль. юпорной
25 поверхности клина 19, движущегося вертикально вверх, сжимая пружину 17, а с ним вместе перемещается и шток 1В. При одновременном срабатывании двух или более силовых цилиндров происхо-30дит суммирование их рабочих перемеще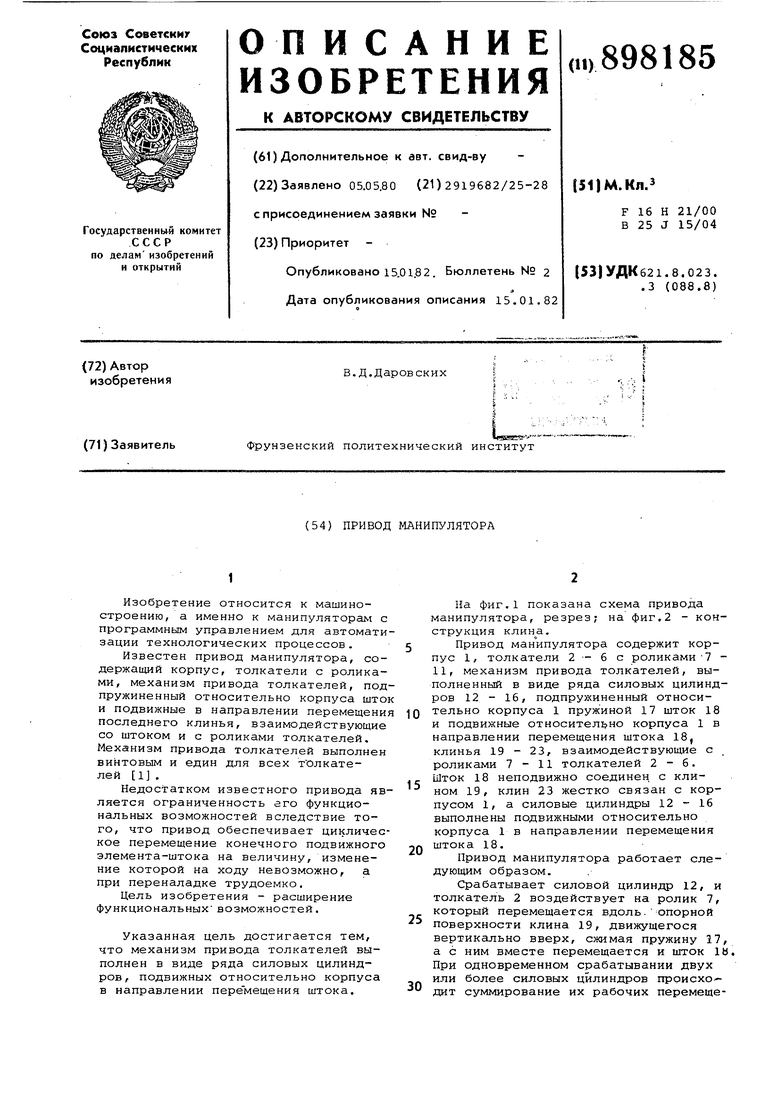
| название | год | авторы | номер документа |
|---|---|---|---|
| Захватное устройство | 1986 |
|
SU1400876A1 |
| УСТРОЙСТВО ДЛЯ ПРОБИВКИ ОТВЕРСТИЙ В ПОЛЫХ ИЗДЕЛИЯХ | 1972 |
|
SU435037A1 |
| Рука манипулятора | 1979 |
|
SU841963A1 |
| Манипулятор для кладки стен из штучных элементов | 1989 |
|
SU1712561A1 |
| Тормоз Попова | 1986 |
|
SU1362874A1 |
| Захват | 1977 |
|
SU667396A1 |
| Клепальный пресс | 1980 |
|
SU1016031A1 |
| Устройство для подачи заготовок | 1988 |
|
SU1576276A1 |
| Устройство для ориентации длинномерных заготовок | 1978 |
|
SU700248A1 |
| Устройство для маркировки этикеток | 1991 |
|
SU1781135A1 |
