Изобретение относится к измерительной технике, в частности к автоматическим многоканальным тензометрическим устройствам, и может быть использовано при исследовании на механическую прочность различных деталей и конструкций.
Известно автоматическое многоканальное тензометрическое устройство, содержащее тензодатчики, измерительный блок, коммутатор, аналогоцифровой преобразователь и цифровую вычислительную машину. В этом устройстве выходы тензодатчиков подключены к соответствующим входам коммутатора. Первый вход коммутатора связан сд входом аналого-цифрового преобразователя, второй выход - с первым входом цифровой вычислительной машины, второй вход которой соединен с выходом аналого-цифрового преобразователя 1.
.Однако это устройство обеспечивает только один режим работы режим регистрации информации. Отсутствие обратной связи от цифровой вычислительной машины для передачи данных и команд в устройство ограничивает его функциональные возможности.
Наиболее близким по технической сущности к предлагаемому является автоматическое многоканальное тензометрическое устройство, содержащее тензодатчики, переключатели, измерительные входы которых подключены к выходам тензодатчиков, коммутатор, управляющий выход которого соединен с управляющими входами
10 переключателей, измерительный блок, вход которого подключен к измерительному выходу коммутатора, цифровую вычислительную машину и аналого-цифровой преобразователь, выход
15 которого подключен к входу цифровой вычислительной машины 2.
Недостатком известного устройства также является то, что. оно обеспечивает только один режим работы 20режим регистрации информации, вследствие отсутствия обратной связи от цифровой вычислительной машины для передачи данных и команд в устройство.
25
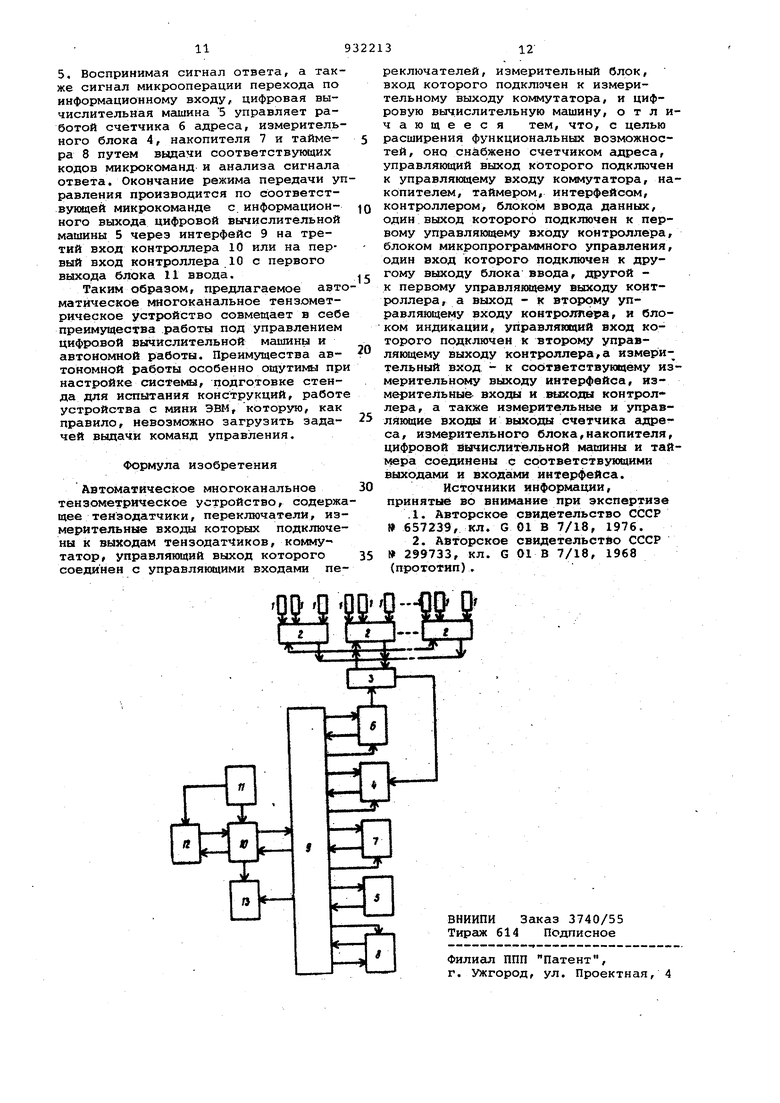
Цель изобретения - расширение функциональных возможностей устройства путем введения обратной связи от цифровой вычислительной машины для передачи входных данных и ко30манд в устройство. Поставленная цель достигается тем что устройство снабжено счетчиком адреса, управлякщий выход которого подключен к управляющему .входу коммутатора, накопителем, таймером, интерфейсом, контроллером, блоком вво да данных, один выход которого подключен к первому управляющему входу контроллера, блоком микропрограммного управления, один вход которого подключен к другому выходу блока вво да, другой - к первому управляющему выходу контроллера, а выход - ко вто рому управляющему входу контролера, и блоком индикации, управляющий вход которого подключен ко второму управля садему выходу контроллера, а измерительный вход - к соответствующему из Iepитeльнoмy выходу интерфейса, измерительные входы и выходы контроллера, а также измерительные и управляющие входы и выходы счетчика адреса, измерительного блока, накопителя, цифровой вычислительной машины и таймера соединены с соответствующими выходами и входами интерфейса. На ч-ертеже представлена блок-схема автоматического многоканальноготензометрического устройства, Устройство содержит тензодатчики 1, переключатели 2, измерительны входы которых под5:лючены к выходам тензодатчиков 1, коммутатор 3, управ ляющий выход которого соединен с управляющими входами переключателей 2, измерительный блок 4, вход которого подключен к.измерительному выходу коммутатора 3, цифровую вычислительную машину 5. Устройство содержит счетчик 6 адреса, управляющий выход которого подключен к управляющему входу коммутатора 3, накопитель 7, таймер 8, интерфейс 9, контроллер 10, блок И ввода данных один выход которого подключен к первому управляющему входу контроллера 10, блок 12 микропрограммного управления, один вход которого подключен к другому выходу блока 11 ввода , другой - к первому управляющему выходу контроллера 10, а выход - ко второму управлякяцему выходу контроллера 10, и блок 13 индикации, управляющий вход которого подключен ко второму управлякедему выходу контроллера 10, а измерительный вход - к соответствующему измерительному выхо цу интерфейса 9. Измерительные входы и выходы контроллера 10, а также измерительные и улравлякэдие входн и выходы счетчика 6 адреса, измерительного блока 4, на копителя 7, цифровой вычислительной машины 5 и таймера 8 соединены с соответствующими выходами и входами интерфейса 9. Автоматическое многоканальное тензометрическое устройство работает следукацим образом. Контроллер 10 по сигналу Пуск поступающему на его первый вход с первого выхода блока 11 ввода, вырабатывает начальный лпульс, кото-рый со второго выхода контроллера 10 поступает на второй вход блока 12 микропрогра 4много управления и приводит к вводу через первый вход в блок 12 микропрограммного управления кода режима со второго выхода блока 11 ввода, чем подготавливается к генерации микрюпрограмма, соответствующая заданному режиму работы устройства. Кроме того, начальный импульс со второго выхода контроллера 10 приводит к генерации кода пер{вой микрокоманды выбранной микропрограммы. Этот код с выхода блока 12 микропрограммного управления поступает на второй вход контроллера 10. Разряды кода микрокоманды по характеру использования можно разбить на четыре зоны: управляющий ход, зону задержки, зону перехода, зону следующего адреса. Управляющий код.с первого выхода контроллера 10 поступает на управляющий вход интерфейса 9, где на основании этого кода вырабатываются импульсы микроопераций, т,е, импульсы, производящие элементарные управляющие действия в блоках устройства, например: Сброс в ноль , Открыть вентили, Установить в единицу, Записать в регистр и т.п. Управляющий код однозначно определяет совокупность микроопераций и адреса функциональных узлов, где эти микрооперации нужно выполнить. Интерфейс 9 в соответствии с управляющим кодом распределяет импульсы микроопераций между управляю|11Ш4и входами подключенных к его управляющим выходам счетчика б адреса, измерительного блока, накопителя 7, цифровой вычислительной машины 5 и таймера 8. После отработки микрокоманд в указанных блоках контроллер 10 нэ автором выходе генерирует импульс, поступёиощий на второй вход блока 12 микропрогргиФниого управления и выбирайэдий следующую микрокоманду. Код этой микрокоманды появляется на вьоеоде блока 12 lикpoпpoгpa Ф4Horo управления и поступает иа второй вход контроллера 10, а затем через его первый выход - на управляющий вход интерфейса 9. Если микрокоманда определяет микрооперации, на выполнение которых в блоках устройства требуется определеииое время,° то в зоне задержки такой микрокоманды устанавливается соответствующий код. Этот код с выхода блока 12 микропрограммного управления поступает на вход контроллера 10 и переводит его в состояние задержки. При этом импульсы, обеспечивающие выборку микрокоманд, контроллером 10 не reнерируются. Интерфейс 9 в соответствии с управляющим кодом, постуПсиощим на его управляющий вход с первого выхода контроллера 10, вырабатывает импульсы микроопераций, поступающие с управляющих вшодов интерфейса 9 на управляющие входы счетчика 6 адреса, измерительного блока 4, накопителя 7, цифровой вычислительной машины 5 и таймера 8. Затем интерфейс 9 ожидает поступление с информационных выходов счет чика 6 адреса, коьвлутатора 3-, изме рительного блока 4, цифровой вычислительной машины 5, таймера 8 {подтверждения отработки этими блока ми адресованных им микроопераций. По получении сигналов готовности со счетчика б сщреса, измерительного блока 4, иакопителя 7, цифровой вычислительной мгшшны 5 и тайкюра 8 интерфейс 9 генерирует сигнал ответ который с соответствующего его информационного выхода поступает на третий вход контроллера 10. Этот сигнал, выводит контроллер 10 из сос тояния эгшёржки, и происходит вьебор ка очередной микрокоманды. Факим образом осуществляется автоматическая синхронизация работы всего авто матического многоканального тензометрического устройства по наиболее медленно действующему блоку. Последовательность выбора микрокоманд может изменяться в зависимости от состояния блоков устройства. Если установлены ..определенные разряды зо ны управляющего кода в данной микрокоманде, интерфейс 9 вырабатывает на соответствующем управляющем выходе импульс, поступающий на управляющий вход соответствующего бло ка. По этому импульсу адресуемый блок вьщает сигнал условия, наприме результат сравнения кодов, сигнал состояния какого-либо элемента, разрйда и т.п. Этот сигнал с инфорMautiOHHoro выхода соответствующего блока поступает на соответствующий информационный вход интерфейса 9, который вырабатывает сигнал перехода. Этот сигнал поступает с информационного выхода интерфейса 9 на третий вход контроллера 10. По зтом сигналу на втором выходе контроллера 10 генерируется импульс, поступающий на второй вход блока 12 микропрограммного управления и производящий выбор не очередндй микрокоманды, как при отсутствии сигнала перехода, а микрокоманды, код номер которой указан в зоне следующего ад ipeca текущей микрокоманды. Переход к микрокоманде с номером, указанным в данной микрокоманде, осуществляет ся также, если установлен соответствующий разряд в зоне перехода кода микрокоманды. Так как информационные входы и выходы счетчика 6 адреса, измерительного блока 4, накопителя- 7, цифровой вычислительной ма1Ш1ны 5 и таймера 8 связаны с соответствукКцими информационными выходами и входами интерфейса 9, то в зависимости от значения управляющего кода интерфейс 9 соединяет указанный в этом коде информационный вход или выход соответствующих блоков с определенными информационными выходами или входами блока 9, благодаря чему соединяются соответствующие информационные выходы и входа блоков, подключенных к интерфейсу 9 (счетчика б адреса, измерительного блока 4, накопителя 7, цифровой вычислительной машины 5 и таймера 8) и происходит передача информации в заданном направлении, причем эта же информация с соответствующего информационного, выхода интерфейса 9 поступает на информационный вход блока 13 индикации.На управляющий вход блока 13 индикации с третьего выхода контроллера 10 поступают сигналы состояния контроллера 10 и управляющий код микрокоманды. Определенная кодовая комбинация управляющего кода воспринимается в блоке 13 индикации как микрооперация записи данных с информационного вЕЛСода интерфейса 9 для индикации, благодаря чему в блоке 13 индикации отображается лишь заранее заданная информация из передаваемой по информационным связям интерфейса 9. Таким образом, последовательная генерация кодов микрокоманд с помседью контроллера 10 и блока 12 микропрограммного управления, восприятие этих кодов соответствующими блоками, подключеннБЬ «и к интерфейсу 9, вырабатывающему сигналы ответа и перехода на основании сигналов готовности и условий из соответствующих блоков, обеспечивает согласованное функционирование всех блоков устройства. Последовательность кодов микрокоманд, соответствующая каждому режиму работы устройства, хранится в блоке 12 микропрограммного управления. Вели в блоке 12 микропрограммного управления для хранения кодов микрокоманд используется перепрограммируемое постоянное запоминающее устройство (ППЭУ), порядок работы блоков устройства может изменяться операто-. ром в зависимости от требований эксперимента .. Для этого коды микрокоманд, соответствующие выбранному режиму работы устройства, последо- вательно набираются в блоке 11 ввода и со второго его выхода подаются. на первый вход блока 12 микропрограммного управления и записываются в соответствующей матрице ППЗУ блока 12 микропрограммного управления Таким образом, реализуется возможность перестраивать работу устройства в зависимости от характера решаемой задачи. Автоматическое многоканальное тен зометрическое устройство может осуществлять четыре режима работы: режим регистрации измерительных данных режим повторно-периодической регистрации, режим подготовки стенда, режим передачи управления. В режиме регистрации измерительно информации устройство работает следукяцим образом. По сигналу Пуск с первого выхода блокз( 11 ввода подготавливается как описано выше, микропрограмма регистрации. .Первая микрокоманда это микропрограммы поступает с выхода блока 12 микропрограммного управления на второй вход контроллера 10. С первого выхода контроллера 10 управляющий код первой микрокоманды поступает на управляющий вход интерфейса 9, где вырабатывается им-пульс микрооперации сброса в ноль счетчика 6 адреса, который подается на управляющий зход счетчика 6 адреса.. Двоичный код с управляющего выхода счетчика 6 адреса поступает на управляющий вход кокмутатора 3, где преобразуется в сигналы управления выборкой тензодатчиков 1, поступающие с управляющего выхода коммутатора 3 на управляющий вход соответствующего переключателя 2 тензодатчиков, котЪрый подключает первый тензодатчик 1 к измерительному входу коммутатора 3. Сигнал с выхода тензо датчика 1 поступает через соответствующий переключатель 2 тензодатчиков на измерительный вход коммутатора 3 и далее с измерительного выхода ком мутатора 3 на измерительный вход измерительного блока 4. Затем контроллер 10 генерирует микрокоманду передачи кода адреса датчика из счетчика 6 адреса в блок 13 индикации, где адрес выбранного датчика индицируется на табло. По следующей микрокоманде запускается измерительный блок 4, и конт роллер 10 переходит в состояние , при котором очередная микрокоманда не выбирается до окончани 1Амерения. Сигнал завершения измере ния поступает с информационного выхода измерительного блока 4 на инфор мационный вход интерфейса 9, которы вырабатывает сигнал ответа, поступающий с соответствующего информационного выхода интерфейса 9 на тре тий вход контроллера 10. По этому сигналу контроллер 10 обеспечивает выдачу следующей микрокоманды, по которой измерительная информация переписывается в накопитель 7 и подается на вход цифровой вычислительной машины 5, как было описано выше. Следующей микрокомандой содержимое счетчика 6 адреса увеличивается на единицу. При этом отключается первый тензодатчик 1 и подключается второй по сигналу, поступающему с управляющего выхода счетчика б адреса на управляющий вход коммутатора 3 и далее с его управляющего выхода на управляющий вход соответствующего переключателя. 2 тензодатчиков. По следующей микрокоманде производится сравнение содержи июго счетчика б адреса с заданным конечным номером тензодатчика 1, хранимом в блоке 11 ввода. Если сравнение про- / изошло, счетчик б адреса вырабатывает сигнал условия, на основании которого интерфейс 9 выдает в контроллер 10 сигнал перехода, который поступает с соответствующего информационного выхода интерфейса 9 на третий вход контроллера 10. По этому сигналу происходит выборка микрокоманды Стоп, и работа устройства прекращается. Если сравнения содержимого счетчика 6 адреса с заданным конечным номером датчика, хранимом в блоке 11 ввода, нет, сигнал перехода не выдается и контроллер 10 выбирает очередную микрокоманду. По этой микрокоманде содержимое счетчика 6 адреса переписывается в блок 13 индикации для индикации. Следующая микрокоманда запускает измерительный блок 4 и переводит контроллер 10 в состояние задержки. По мере окончания процессов измерения, регистрации, ввода в цифровую вычислительную машину 5 измерительным блоком 4, накопителем 7, цифровой вычислительной машиной 5 выдаются сигналы готовнос.ти, которые поступают на соответствующие информационные входы интерфейса 9. По окончании самого длительного из этих процессов интерфейс 9 вырабатывает сигнал ответа, который поступает с соответствующего информационного выхода интерфейса 9 на третий вход контроллера 10. По этому сигналу контроллер выбвдает очередную микрокоманду, по которой увеличивается содержимое счетчика б адреса и выбирается следующий тенэодатчик 1. Таким образом, процесс повторяется до сравнения текущего номера тензодатчика с заданным конечным номером, т.е. до завершения опроса заданного количества датчиков. Второй режим работы, осуществляемый автоматическим многоканальным тензометрическим устройством, режим повторно-периодической регистрации,. предназначен для регистрации показаний выбранного массива датчиков через заданный перед началом работы в блоке 11 ввода интервал времени. Режим используется для сокращения потока данных при исследовании динамических процессов. Работа устройства начинается подачей сигнала Пуск, по которому контроллер 10 генерирует последовательность микрокоманд, обеспечиваккдих регистрацию показаний выбранного массива тензодатчиков, как описано выше, в режиме регистрации. По окончании регистрации контроллер 10 генерирует микрокоманду запуска таймера 8, и начинается отсчет времени. Затем контроллерЮ генерирует микрокоманду анализа сравнения кода таймера 8 с кодом заданного времени задержки. Код таймера 8 поступает с его информационного выхода на соответствукмций информационный вход интерфейса 9, а затем с соответствующего информационного выхода интерфейса 9 на третий вход контроллера 10. Ко заданного времени задержки записан в блоке 11 ввода перед началом рабо ты я поступает на первый вход контроллера 10.Если код таймера 8 не ра Е|ен коду заданного значения, контрй ллер 10 генерирует микрокоманду зар си показаний таймера 8 в блок 13 ин дикации. При этом на табло блока 13 индикации индицируется текущее зыачение показаний таймера 8; После этого вновь генерируется микрокоман да анализа сравнения. Этот цикл повторяется до тех пор, пока код таймера 8 не сравняется с кодом задаииого значения времени задержки. После этого контроллер 10 генерируе как было описано выше, последовател ность микрокоманд регистрации показаний тензодатчиков. По окончании регистрации вновь подается микрокоманда запуска таймера 8, и цикл, работы повторяется. Повторно-периодическая регистрация показаний выбранного массива тензодатчиков 1 про должается до подачи сигнала Стоп из блока 11 ввода на первый вход контроллера 10. В режиме подготовки стенда для испытаний конструкций устройство ра ботает следующим образом. Как и во всех режимах с подачей сигнгша Пуск, контроллер 10 обе печивает выборку, как было описано выше, из блока 12 микропрограммного управления первой микрокоманды из микропрограммы, соответствующей данному режиму. Эта микрокоманда обеспечивает подключение к измерительному блоку 4 с помощью первого переключателя 2 тензодатчиков и ком мутатора 3 первого тензодатчика. За тем контроллер 10 генерирует микрокоманду запуска измерительного блока 4 и переходит в состояние задержки. По окончании измерения генерируется микрокоманда анализа разряда переполнения измерительного блока 4. Если переполнения нет, генерируется микрокоманда увеличения содержимого счетчика б сщреса на единицу и процессы повторяются. Если разряд переполнения измерительного блока 4 установлен, значит измерительная цепь данного канала закорочена или оборвана и показания счетчика 6 адреса в этом случае подлежат регистрации. Для этого по команде анализа при наличии сигнала перехода, выработанного интерфейсом 9 на основании условия переполнения,происходит условный переход в микропрограмме к микрокоманде передачи кода с информационного выхода счетчика б адреса в накопитель 7 и цифровую вычислительную машину 5, затем генерируется микрокоманда запуска накопителя 7 и цифровой вычислительной машины 5, и контроллер 10 переходит в состояние задержки. По окончании регистрации выбирается микрокоманда, у которой установлены соответствующие разряды в зоне перехода, происходит переход в микропрограмме к микрокоманде увеличения содержимого счетчика б адреса на единицу и процессы повторяются. Работа устройства происходит до окончания опроса всего .заданного массива тензодатчиков 1, после чего в накопителе 7 и (или) цифровой вычислительной машине 5 оказываются зарегистрированными адреса оборванных и закороченных датчиков. Эти данные используются для устранения автоматически выявленных неисправностей измерительных цепей или учитываются при обработке измерительной информации в цифровой вычислительной машине 5. Система позволяет, реализовать также режим передачи управления, при котором последовательность команд генерируется не контроллером 10 и блоком 12 микропрограммного управления, а цифровой вычислительной машиной 5. В этом режиме контроллер 10 генерирует микрокоманду передачи управления и переходит в состояние задержки. Микрокоманда передачи управления вЬсприннмается интерфейсом 9, который подключает информационный выход цифровой вычислительной машины 5 к управляющим выходам интерфейса 9. Кроме того, интерфейс 9 обеспечивает выдачу сигнала ответа, вырабатываемого на основании сигналов готовности измерительного блока 4, накопителя 7, таймера 8, не на третий.вход контроллера 10, а на информационный вход цифровой вычислительной машнны
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство микропрограммного управления | 1983 |
|
SU1188734A1 |
| Микропрограммное устройство управления | 1987 |
|
SU1490676A1 |
| Тензометрическое устройство | 1986 |
|
SU1427166A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1140120A1 |
| Микропрограммное устройство управления | 1979 |
|
SU881747A1 |
| Микропрограммное устройство управления | 1981 |
|
SU968814A1 |
| Микропрограммный процессор | 1981 |
|
SU980095A1 |
| Микропрограммное устройство управления | 1983 |
|
SU1170457A1 |
| Устройство адресации многопроцессорной вычислительной машины | 1983 |
|
SU1129613A1 |
| Микропрограммное устройство управления | 1984 |
|
SU1259262A1 |
