Целью изобретения является повышение быстродействия устройства.
Поставленная цель достигается тем, что в устройство, содержащее датчики положений вспомогательных механизмов, программируемый логический контроллер, задатчики скорости, регулятор скорости, электродвигатель вращения шпинделя, та- хогенератор, датчик угловых перемещений, приводы вспомогательных механизмов, блок управления шаговым двигателем, электродвигатель раскладчика, дешифратор адреса, элемент ЗАПРЕТ, первый и второй счетчики импульсов, блок формирования импульсов и пульт оператора, входы и выходы которого подключены соответственно к первой группе выходов управления нагрузками и к первой группе входов ввода диск- ретных сигналов программируемого логического контроллера, вторая группа входов ввода дискретных сигналов которого подключена к соответствующим выходам датчиков положений вспомогательных механизмов, шина адреса и выход сигнала за- писи программируемого логического контроллера соединены соответственно с адресными входами и входом синхронизации дешифратора адреса, первый выход управления нагрузкой программируемого логического контроллера соединен с первым входом регулятора скорости, вторая группа выходов и второй выход управления нагрузками программируемого логического контроллера - соответственно со входами приводов вспомогательных механизмов и с первым входом задатчика скорости, выходом соединенного со вторым входом регулятора скорости, выходы которого подключены к электродвигателю вращения шпинделя, выход которого соединен механически со шпинделем, со входом тахогене- ратора, выходом соединенного с третьим входом регулятора скорости, и со .входом датчика угловых перемещений, первым вьк ходом соединенного с прямым вхЪдом элемента ЗАПРЕТ, выход которого подключен к счетному входу первого счетчика импульсов, вход сброса которого соединен со вто- рым выходом датчика угловых перемещений и входом сброса второго счетчика импульсов, счетный вход которого под- ключен к первому выходу блока формирования импульсов и к импульсному входу блока управления шаговым двигателем, выходы которого подключены к электродвигателю раскладчика, выход которого соединен механически с раскладчиком, введены задатчик направления, первый, второй, третий и четвертый регистры, первый и второй компараторы, третий счетчик импульсов, элемент НЕ, первый и второй элементы ИЛИ-НЕ и элемент ИЛИ. первый вход которого соединен со вторым выходом блока формирования импульсов, первый
5 вход которого подключен ко второму выходу датчика угловых перемещений и ко второму входу элемента ИЛИ. выходом соединенного со входом обратного счетчика третьего счетчика импульсов, вход записи которого
0 подключен к третьему выходу блока формирования импульсов, второй вход которого Соединен со входом сброса третьего счетчика импульсов и выходом сигнала сброса программируемого логического контролле5 ра, шина данных которого соединена с информационными входами первого, второго, третьего и четвертого регистров, выходы четвертого регистра подключены к информационным входам третьего счетчика им0 пульсов, выход нулевого разряда Которого соединен с инверсным входом второго элемента ИЛИ-НЕ и с прямым входом первого элемента ИЛИ-НЕ, а выходы остальных разрядов - с группой прямых входов второго
5 элемента ИЛИ-НЕ и первого элемета ИЛИ- НЕ, выход которого подключен ко входу ввода дискретных сигналов программируемого логического контроллера и ко второму входу задатчика скорости, третьим входом соеди0 ненного с первым выходом управления нагрузкой программируемого логического контроллера, а четвертым - с первым входом задатчика направления, группой выходов подключенного к потенциальным
5 входам блока управления шаговым двигателем, с третьим входЬм бяока формирования импульсов, входом разрешения вывода данных третьего регистра, выходом второго элемента ИЛИ-НЁ и входом элемента НЕ,
0 выход которого подключен ко входу разрешения вывода данных второго регистра, выходы которого объединены с выходами третьего регистра и первой группой вхбдов второго компаратора, вторая группа входов
5 которого соединена с выходами второго счетчика импульсов, а выход второго компаратора подключен к четвертому входу блока формир вания импульсов, пятый вход которого соединен с иневрсным входом элемен0 та ЗАПРЕТ и выходом первого компаратора, подключенного второй и первой группами входов соответственно к выходам первого счетчика импульсов и первого регистра, вход записи которого соединен с первым
5 выходом дешифратора адреса, второй и третий выходы которого соединены со входами записи соответственно второго и третьего регистров, а четвертый выход дешифратора адреса соединен со входом записи четвертого регистра, пятым входом задатчика скорости и вторым входом задатчика направления, выходом подключенного к шестому входу блока формирования импульсов
Введение в состав устройства задатчика направления, первого, второго, третьего и четвертого регистров, первого и второго компараторов, третьего счетчика импульсов, элемента НЕ, первого и второго элементов ИЛИ-НЕ и элемента ИЛИ с соответствующими связями повышает быс- тродействие устройства, так как при этом программируемый логический контроллер осуществляет обработку всего одного сигнала при намотке слоя катушки (быстродействие устройства повышается во столько раз, сколько витков в слое катушки).
Применение аппаратных средств дли контроля угл а поворота шпинделя, величины перемещения раскладчика, числа витков слоя, выбора направления перемещения раскладчика и частоты вращения шпинделя и использование для реализации остальных функций управления программируемого логического контроллера, значительно повышает быстродействие устройства, при этом скорость намотки катушек практически не зависит от быстродействия контроллера.
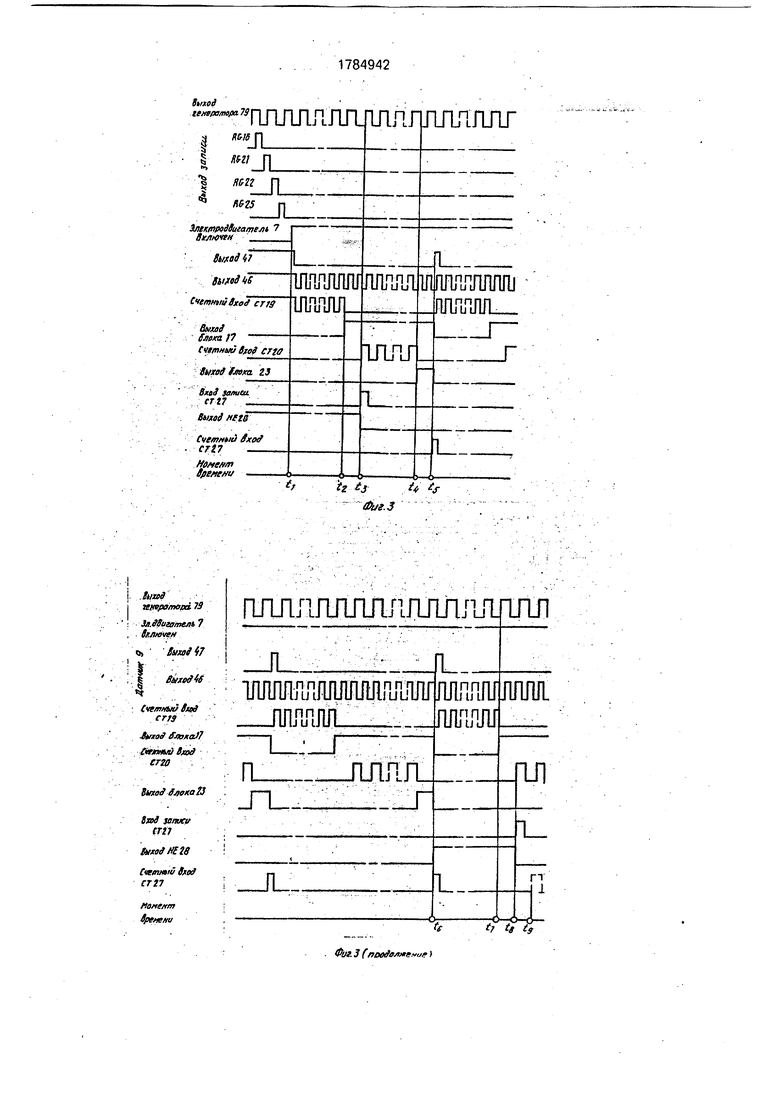
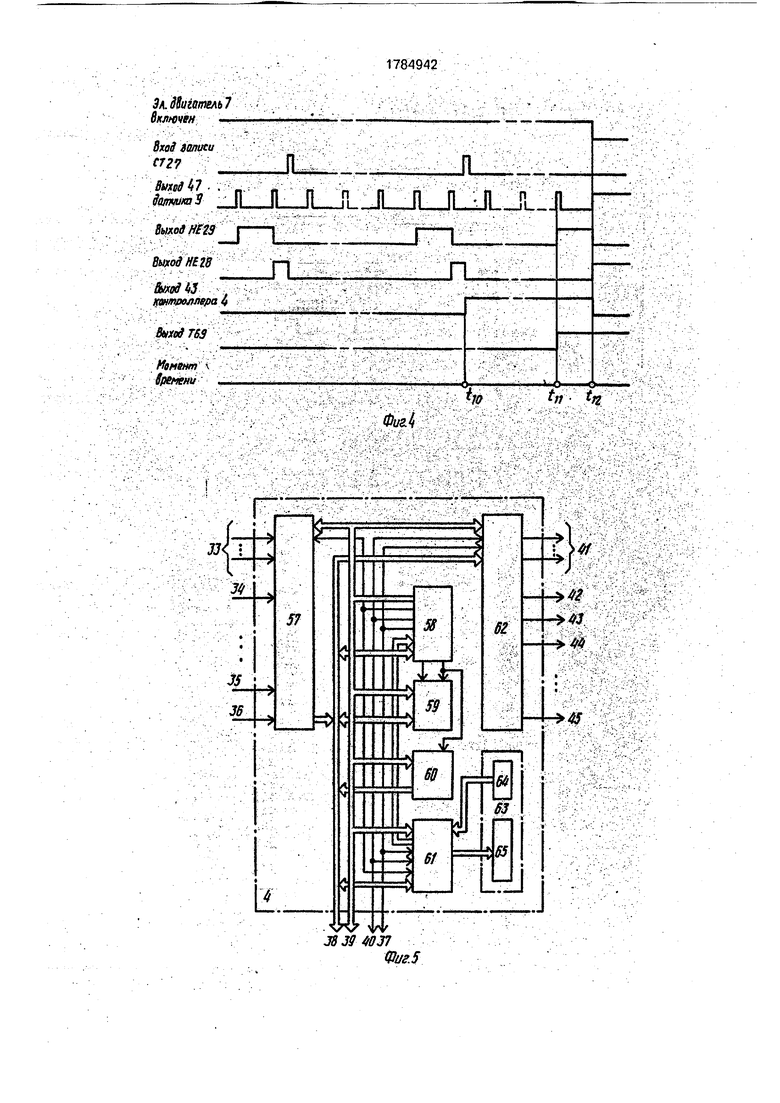
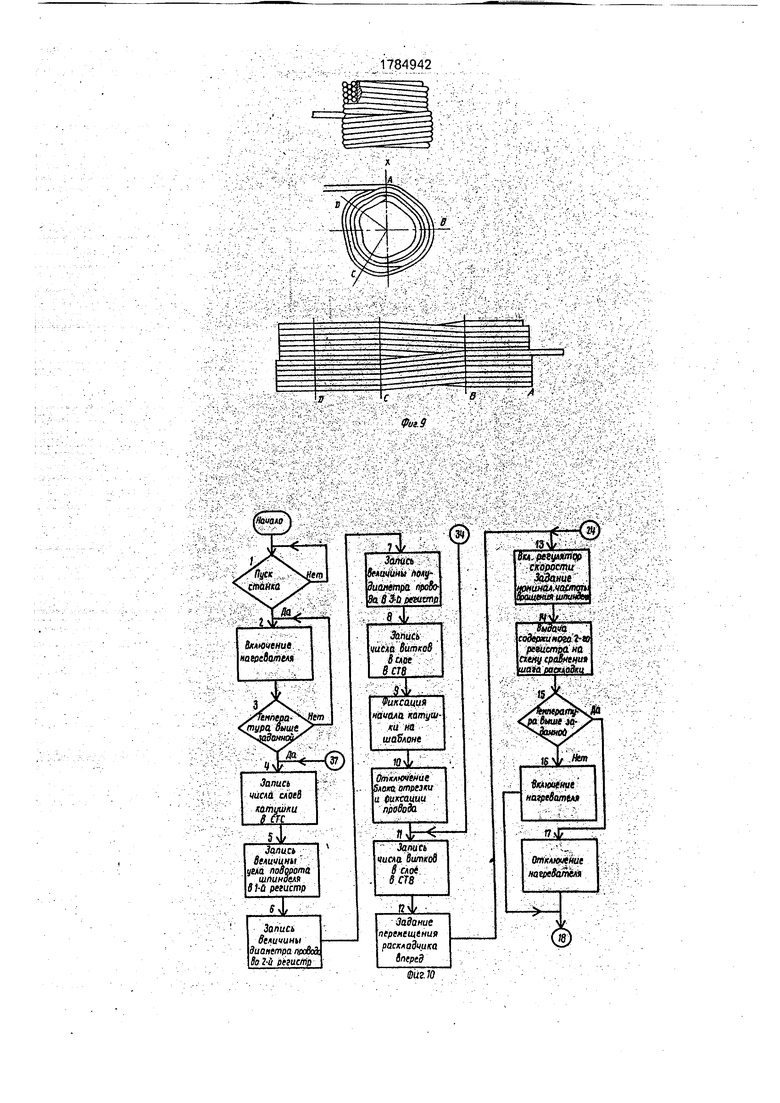
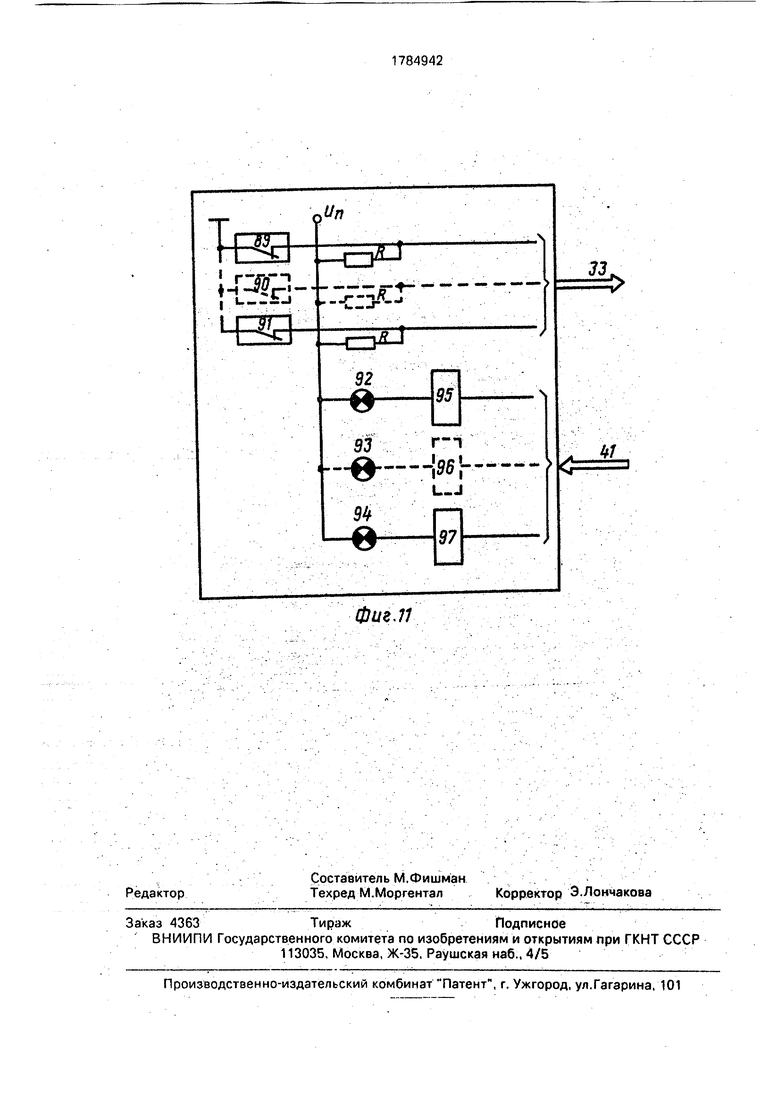
На фиг 1 изображена функциональная схема устройства, на фиг 2 - алгоритм его работы; на фиг 3,4 - временные диаграммы работы устройства; на фиг.5 - 8 - функциональные схемы соответственно программируемого логического контроллера, задатчика скорости, задатчика направлений и блока формирования импульсов; на фиг.9 -типовая форма наматываемой катушки; на фиг 10 - пример алгоритма программы управления процессом намотки; на фиг.11 - функциональная схема пульта оператора.
Устройство см. фиг. 1} содержит пульт 1 оператора, датчики 2 3 положений вспомогательных механизмов, программируемый логический контроллер 4, задатчик 5 скорости, регулятор 6 скорости,электродвигатель 7 вращения шпинделя, тахогенератор 8, датчик 9 угловых перемещений, приводы 10 11 вспомогательных механизмов, блок 12 управления шаговым двигателем, электродвигатель 13 раскладчика, задатчик 14 направления, дешифратор 15 адреса, первый регистр 16, первый компаратор 17, элемент ЗАПРЕТ 18, первый счетчик 19 импульсов, второй счетчик 20 импульсов, второй 21 и третий 22 регистры, второй компаратор 23, элемент НЕ 24, четвертый регистр 25, эле- мент ИЛИ 26, третий счетчик 27 импульсов, первый элемент ИЛИ-НЕ 28. второй элемент ИЛИ-НЕ 29 и блок 30 формирования импульсов Электродвигатель 7 механически соединен со шпинделем, на котором
крепится шаблон катушки 31. На последний наматывается провод, перемещаемый в процессе намотки вдоль оси шаблона раскладчиком 32.
Выходы пульта 1 оператора подключены к первой групгге входов 33 ввода дискретных сигналов программируемого логического контроллера 4, вторая группа входов 34.. 35 ввода дискретных сигналов которого подключены к соответствующим выходам датчиков 2. 3 положений вспомогательных механизмов.
Выход 36 первого элемента ИЛИ-НЕ 28 соединен со входом ввода дискретных сигналов программируемого логического контроллера 4 и вторым входом задатчика 5 скорости.
Программируемый контроллер 4 также соединен выходом 37 сигнала сброса - со вторым входом блока 30 формирования импульсов и входом сброса третьего счетчика 27, шиной 38 данных - с информационными входами первого 16, второго 21. третьего 22 и четвертого 25 регистров; шиной 39 адреса - с адресными входами дешифратора 15 адреса; выходом 40 сигнала записи - со входом синхронизации дешифратора 15 адерса
Выходы управления нагрузками программируемого логического контроллера 4 подключены первая группа 41 - ко входам пульта 1 оператора; первый 42 - к третьему входу задатчика 5 скорости и к первому входу регулятора 6 скорости; второй 43 - к первому входу задатчика 5 скорости; вторая группа 44. .45 - ко входам приводов 10., 11 вспомогательных механизмов.
Выход задатчика 5 скорости соединен со вторым входом регулятора 6 скорости, выходы которого подключены к электродвигателю 7 вращения шпинделя, выход которого соединен механически со шпинделем, со входом тахогенератора 8, выходом соединенного с третьим входом регулятора б скорости и со входам датчика 9 угловых перемещений Первый выход 46 датчика 9 соединен с прямым входом элемента ЗАПРЕТ 18, выход которого подключен к счетному входу первого счетчика 19 импульсов Второй выход 47 датчика 9 соединен со входами сброса первого 19 и второго 20 счетчиков импульсов, вторым входом элемента ИЛИ 26 и первым входом блока 30 формирования импульсов, Задатчик 14 направления группой выходов 48 подключен к потенциальным входам блока 12 управления шаговым двигателем, выходы которого подключены к электродвигателю 13, выход которого соединен механически с расклад- чиком 32 Второй выход 49 блока 30 формирования импульсов подключен к первому входу элемента ИЛИ 26. Выход последнего соединен со входом обратного счета третьего счетчика 27 импульсов, вход 50 записи которого подключен к третьему выходу блока 30 формирования импульсов, четвертый вход 51 которого соединен с выходом второго компаратора 23. Выходы четвертого регистра 25 подключены к информационным входам третьего счетчика 27 импульсов, выход нулевого разряда которого соединен с инверсным входом второго элемента ИЛИ- НЕ 29 и прямым входом первого элемента ИЛИ-НЕ 28. Выходы остальных разрядов счетчика 27 соединены с группой прямых входов второго элемента ИЛИ-НЕ 29 и первого элемента ИЛИ-НЕ 28. Четвертый вход 52 задатчика 5 скорости соединен с первым входом задатчика 14 направления, третьим входом блока 30 формирования импульсов, входом разрешения вывода данных третьего регистра 22, выходом второго элемента ИЛИ-НЕ 29 и входом элемента НЕ 24, выход которого подключен ко входу разрешения вывода данных второго регистра 21.
Выходы второго регистра 21 объединены с выходами третьего регистра 22 и с первой группой входов второго компаратора 23, вторая группа входов которого соеди- нена с выходами второго счетчика 20 импульсов. Первый выход 53 блока 30 формирования импульсов подключен к счетному входу второго счетчика 20 импульсов и к импульсному входу блока управления шаговым двигателем. Пятый вход 54 блока 30 соединён с инверсным входом элемента ЗАПРЕТ 18 и выходом первого компаратора 17, подключенного второй и первой группами входов соответственно к выходам первого счетчика 19 импульсов и перовго регистра 16, вход записи которого соединен с первым выходом дешифратора 15 адреса. Второй, третий и четвертый выходы дешифратора 15 адреса соединены со входами записи соответственно второго 21, третьего 22 и четвертого 25 регистров. Выход 55 задатчика 14 направления подключен к шестому входу блока 30 формирования импульсов, а второй вход 56 задатчика направления - к четвертому выходу дешифратора 15 адреса и пятому входу задатчика 5 скорости.
Программируемый логический контроллер 4 (см. фиг.5), содержит первый параллельный интерфейс 57. процессорный блок 53. оперативное 59 и постоянное 60 запоминающие устройства, блок 61 управления, второй параллельный интерфейс 62. пульт 63 управления, содержащий клавиатуру 64 и индикаторы 65.
К шине 39 адреса подключены выходы
разрядов адреса процессорного блока 58 и
входы разрядов адреса оперативного 59 и
постоянного 60 запоминающих устройств
5 блока 61 управления,первого 57 и второго
62параллельных интерфейсов.
С шиной 38 данных соединены входы - выходы разрядов данных процессорного блока 58, оперативного запоминающего ус0 тройства 59 и блока 61 упра&ления; выходы разрядов данных первого параллельного интерфейса 57 и постоянного запоминающего устройства 60; входы разрядов данных второго параллельного интерфейса 62.
5 Процессорный блок 58 подключен выходом сигнала чтения памяти к одноименным входам оперативного 59 и постоянного 60 Запоминающих устройств; выходом сигнала записи в память к одноименному входу опе0 ративного запоминающего устройства; выходом сигнала чтения устройств ввода-вывода к одноименным входам первого параллельного интерфейса 57 и блока 61 управления; выходом 40 сигнала записи
5 в устройства ввода-вывода и выходом 37 сброса к одноименным входам блока 61 управления и второго параллельного интерфейса 62; входами запросов прерываний к одноименным выходам блока 61 управле0 ния
Блок 61 управления соединен с пультом
63управления информационными входами с клавиатурой 64 и информационными выходами с индикаторами 65.
5 Входы 33,34.„35,36 первого параллельного интерфейса 57 являются соответственно первой группой входов, второй группой входов и входом ввода дискретных сигналов программируемого логического контролле0 ра.
Выходы41,42,43,44...45 второго параллельного интерфейса 62 являются соответственно первой группой выходов, первым и вторым выходами, бторой группой выходов
5 управления нагрузками программируемого логического контроллера
Шина 39 адреса, выходы 37 и 40 процессорного блока 58 и шина 38 данных являются выходами Программируемого
0 логического контроллера
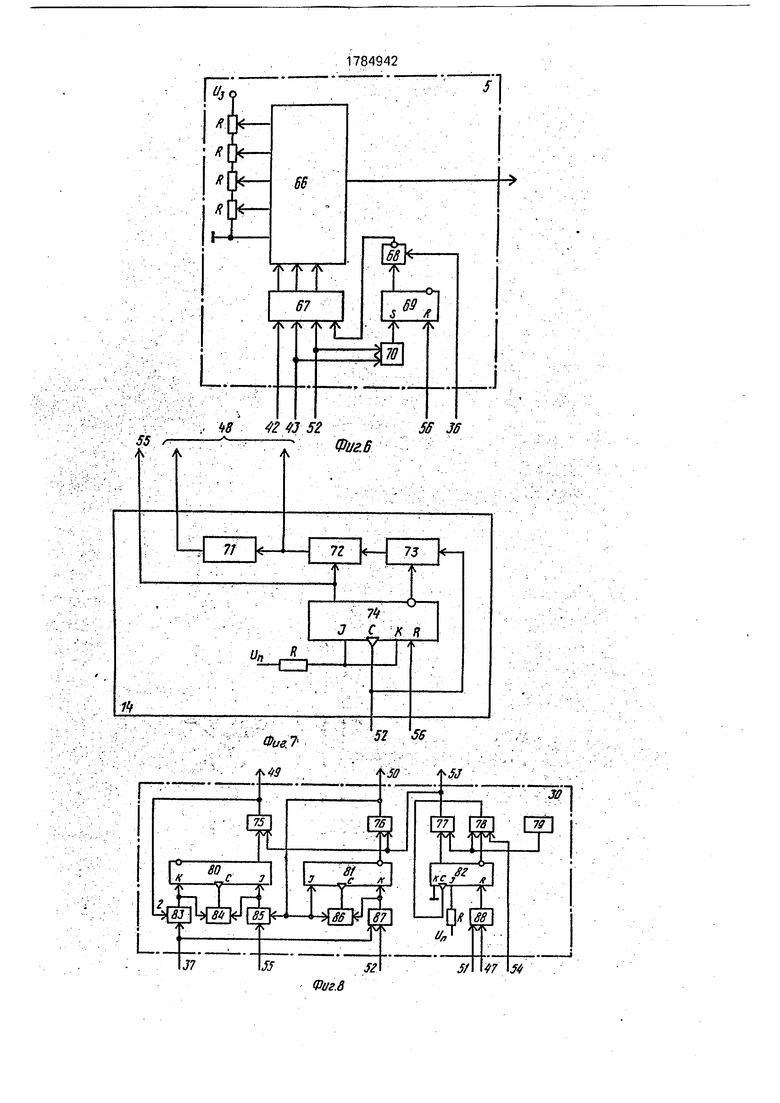
Задатчик 5 скорости (см. фиг 6) содержит мультиплексор 66 аналоговых сигналов блок 67 элементов И, элемент И-НЕ 68, триггер 69, элемент И 70, и группу последо5 вательно соединенных переменных резисторов К свободному выводу первого резистора подключен положительный полюс источника эталонного напряжения отрицательный полюс которого подключен к свободному выводу последнего резистора и
входу мультиплексора 66, имеющего нулевой адрес К каждому из остальных входов мультиплексора 66 подключен вывод регулируемого сопротивления соответствующего резистора.
Входы задатчика подключены: первый 43 - ко второму входу блока 67 элементов И к первому входу элемента И 70, выход которого соединен со входом единичной установки триггера 69; пятый 56 - ко входу сброса триггера 69, выход которого соединен с первым входом элемента И-НЕ 68; второй 36 - ко второму входу элемента И-НЕ 68, выход которого соединен с четвертым рходом блока 67 элементов И; третий 42 - к первому входу блока 67 элементов И, четвертый 52 - к третьему входу блока 67 элементов И и ко второму входу элемента И 70. Выходы блока 67 элементов И подключены к адресным входам мультиплексора 66, выход которого является выходом задат- ика.
Задатчик 14 направления (см.фиг.7) содержит элемент НЕ 71, элемент ИЛИ 72, элемент И 73 и триггер 74, Второй вход 56 блока подключен ко входу асинхронного сброса триггера 74, счетный вход которого соединен с первым входом 52 блока и с первым входом элемента И 73. Второй вход элемента И 73 соединен с нулевым выходом триггера 74, единичный выход которого подключен к первому входу элемента ИЛИ 72 и является вторым выходом 55 задатчика. Второй вход элемента ИЛИ 72 соединен с выходом элемента И 73, а выход элемента ИЛ И 72 подключен ко входу элемента НЕ 71. Выход и вход элемента НЕ 71 являются первыми выходами 48 задатчика. .
блок 30 формирования сигналов (см. фиг.8) содержит элементы И 75 - 78, генератор 79 импульсов, триггеры 80, 81, 82, элементы ИЛИ 83 - 88. Выход генератора 79 импульсов соединен с первыми входами элементов И 77 и И 78; вторые входы которых соединены соответственно с единичными и нулевым выходами триггера 82. К третьему входу элемента И 78 подключен пятый вход 54 блока, а выход элемента И 78 соединен со входом С синхронизации триггера 82, вход асинхронного сброса которого подключен к выходу элемента ИЛИ 88, первый и второй входы которого соединены соответственно с первым 47 и четвертым 51 входами блока. Выход элемента И 77 является первым 53 выходом блока и подключен к первым входам элементов И 75 и И 76. Второй вход элемента И 76 соединен с нулевым выходомтриггера 81. а вы ход элемента И 76 является третьим 50 выходом блока и соединен с первым входом элемента ИЛИ
86, с первым входом элемента И 85, второй вход которого является шестым входом 55 блока, и входом I для синхронизируемой установки единичного состояния триггера
81, вход К для синхронизируемого сброса которого соединен со вторым входом элемента ИЛИ 86 и выходом элемента ИЛИ 87, Выход элемента ИЛИ 86 подключен ко входу С синхронизации триггера 81. Первый
0 вход элемента ИЛИ 87 является третьим входом 52 блока, а второй вход элемента ИЛИ 87 является вторым входом 37 блока и соединен с первым входом элемента ИЛИ 83. Выход элемента ИЛИ 83 подключен ко
5 входу К для синхронизируемого сброса триггера 80 и к первому входу элемента ИЛИ 84. Вход I для синхронизируемой установки единичного состояния триггера 80 соединен со вторым входом элемента ИЛИ 84,
0 выходом подключенного ко входу С синхронизации триггера 80, и с выходом элемента И 85, а единичный вход триггера 80 - со вторым вШД5м элемента И 75, выход которого является вторым выходом 49 блока и
5 подключен ко второму входу элемента ИЛИ 83.-
Пульт 1 оператора (см.фиг.11) содержит кнопки 89, 90, 91 управления, индикаторы 92, 93, 94 и усилители 95, 96, 97. Первые
0 выводы контактов кнопок управления объединены и подключены к отрицательному полюсу источника питания. Второй вывод контакта каждой из кнопок управления через резистор соединен с положительным
5 полюсом источника питания и выходом 33 пульта. Усилители 95,96,97 своими входами соединены с соответствующими входами 41 пульта, а выходами - с индикаторами 92,93, 94. . 0 Устройство работает следующим образом (см. фиг. 1-З).
В запоминающее устройство программируемого логического контроллера 4 (в качестве которого может быть, например,
5 микроконтроллер программируемый МКП- 1), заносится программа управлевия циклом намоточного станка. При включении устройства контроллер 4 устанавливается в исходное состояние, его счетчик команд (СТК)
0 устанавливается в положение, соответствующее началу цикла работы станка. На первом 42 выходе управления нагрузкой контроллера возникает нулевой сигнал, который поступает на третий вход задатчика 5
5 скорости и первый вход регулятора 6, запрещая вращение электродвигателя 7 шпинделя, а на выходе 37 контроллера возникает сигнал сброса, который устанавливает в исходное состояние счетчик 27 импульсов и
блок30 формирования импульсов. Посигналу с выхода 47 датчика 9 первый 19 и второй 20 счетчики импульсов устанавливаются в нулевое положение (оператор 1).
Устройство может работать в двух режимах: Ввод программы и Автоматика. Режим Ввод программы используется для записи команд управляющей программы в запоминающее устройство, обеспечивающей выполнение заданного алгоритма управления циклом станка, и параметров изготавливаемой катушки (количества слоев катушки, количества витков в слое, диаметра провода и др.).
При этом необходимая команда набирается оператором на клавиатуре пульта управления контроллера 4, заносится в его запоминающее устройство и отображается на индикаторах пульта управления (операторы 2...6).
В режиме Автоматика контроллер 4 осуществляет управление станком в соответствии с управляющей программой, хранимой в его запоминающем устройстве. При поступлении сигнала Пуск с пульта 1 оператора на один из входов первой группы входов 33 программируемого логического контроллера 4 начинается отработка программы станка. Осуществляется запись уставок в первый регистр 16 (величины угла поворота шпинделя (шаблона катушки) от исходного положения, после отработки которого начинается переброс провода), во второй 21 и третий 22 регистры (величины переброса провода при намотке одного витка, равнрй диаметру (регистр 21) и половине диаметра (регистр 22) провода), и в четвертый регистр 25 (количество витков в слое катушки). При этом на адресных входах (шине 39 адреса) и входе синхронизации (выходе 40 сигнала записи контроллера) дешифратора 15 адреса появляется комбинация сигналов, обеспечивающая запись кода числа, присутствующего на шине 38 данных, в соответствующий регистр. При записи уставки в четвертый регистр 25 на пятый вход 56 задатчика 5 скорости поступает импульс, устанавливающий последний в состояние, при котором на выходе задатчика будет присутствовать аналоговый сигнал, соответствующий комбинации входных сигналов. Одновременно на второй вход задатчика 14 поступает импульс, устанавливающий его в исходное состояние.
После этого СТК переводится в положение, обеспечивающее отработку следующего шага управления (операторы 7...11).
Программой предусматривается выполнение алгоритма управления последовательно по шагам (очередная
технологическая операция выполняется после завершения выполнения предыдущей) В начале цикла работы станка обеспечивается перемещение вспомогательных ме- 5 ханизмов (включение нагревателя, обеспечивающего расплавление горячим воздухом клеющего слоя провода в процессе намотки, заведение начала катушки в узел фиксации на шаблоне перед намоткой),
0 при этом в зависимости от комбинации сигналов датчиков 2...3 положений, установленных на станке, контроллер 4 обеспечивает выдачу необходимых команд включения приводов 10...11 вспомогатель5 ных механизмов (операторы 39...42).
Затем производится включение (момент t1) электродвигателя 7 вращения шпинделя и выбор направления-перемеще- ния (вправо или влево) раскладчика. Для
0 этого с выхода 42 контроллера 4 поступает сигнал запуска на первый вход регулятора 6 скорости и на третий вход задатчика 5 скорости, который формирует на втором входе регулятора б скорости аналоговый сигнал,
5 обеспечивающий номинальную частоту вращения электродвигателя 7. Направление перемещения раскладчика определяется задатчиком 14, который формирует на одном из выходов 48 сигнал, обеспечивающий
0 с помощью блока 12 управления шаговым приводом и электродвигателя 13 перемещения раскладчика в начале цикла вперед (оператора 14...21).
Система регулирования частоты враще5 ния электродвигателя 7, включающая регулятор 6 скорости, электродвигатель 7 и тахогенератор 8, может быть выполнена также, как например, комплектный электропривод ЭПУ1 (электропривод регулируе0 мый, паспорт ИГФР 654673001ПС). На входе регулятора 6 скорости сравнивается сигнал задания с выхода задатчика 5 скорости и сигнал отрицательной обратной связи по частоте вращения, поступающий с тахо5 генератора 8, находящегося на валу электродвигателя 7. При наличии рассогг .сования регулятор 6 скорости формирует импульсы управления своими силовыми элементами, обеспечивая изменение
0 подводимого к якорю напряжения, а следовательно, частоты вращения электродвигателя. По мере уменьшения рассогласования (под действием отрицательной обратной связи по частоте вращения) происходит ста5 билизация частоты вращения на уровне, пропорциональном напряжению задания
При вращении шпинделя датчик 9, который может быть выполнен также, как например, преобразователь угловых перемещений фотоэлектрический модели
BE 178A5 (техническое описание и инструкция по эксплуатации BE 178A500.01 ТО), формирует на первом выходе сигнал начала отсчета (один на оборот) и на втором выходе - серию измерительных сигналов за один оборот вала. Окончание сигнала на втором 47 выходе датчика 9 разблокирует счетчики 19 и 20, после чего сигналы с первого 46 выхода датчика 9 проходят через элемент ЗАПРЕТ 18 на счетный вход первого счетчика 19 (счетчики 19 и 20 могут быть выполнены, например, на базе интегральных схем К155ИЕ5) При повороте шпинделя на заданный угол осуществляется намотка провода на участок шаблона ADC без раскладки провода (через точку X исходного положения шпинделя последовательно проходят точки A, D, Сшаблона наматываемой катушки, фиг 9). в результате чего содержимое счетчика 19 становится равным содержимому первого регистра 16 На выходе компаратора 17 (который может быть выполнен так же как и компаратор 23), появляется единичный сигнал (операторы 22. .24), который блокирует элемент ЗАПРЕТ 18 и поступает на пятый вход 54 блока 30 формирования импульсов (момент 12} Последний формирует импульс (один - при намотке слоя катушки, момент t3) на своем третьем выходе 50, который поступает на вход записи третьего счетчика 27 импульсов (который может быть выполнен, например, на базе интегральных схем К155ИЕ7), осуществляя загрузку в него содержимого четвертого регистра 25 (оператора 25, 28). С момента t3 с первого выхода 53 блока 30 импульсы проходят на импульсный вход блока 12 управления шаговым двигателем 13 и на счетный вход второго счетчика 20. Блок 12 может быть выполнен так же, как, например, блок управления типа БУШ-1. При поступлении импульса на его вход блок 1Д обеспечивает поворот 13 и, следовательно, перемещение раскладчика 32 на один шаг. Переброс провода на заданную величину, равную диаметру провода, осуществляется при прохождении участком СВ шаблона наматываемой катушки точки X (фиг 9), при этом имеется разрешение выдачи данных из регистра 21, так как при намотке всех витков слоя катушки, кроме последнего, содержимое счетчика 27 не равно единице, на выходе элемента ИЛИ-НЕ 29 присутствует нулевой, а после элемента НЕ 24 - единичный сигнал. Выходы третьего регистра 22 переходят в состояние с высоким выходным сопротивлением (регистры 21 и 22 могут быть выполнены, например, как многорежимный буферный регистр К589ИР12), и на первую группу входов второго компаратора
23 поступают сигналы с выходов второго регистра 21 (операторы 19, 20). Поэтому переброс провода при намотке всех витков слоя, кроме последнего, будет осуществляться до тех пор, пока содержимое счетчика 20 не станет равным содержимому второго регистра 21. В этом случае на выходе компаратора 23 появляется единичный сигнал (операторы 31, 32), который поступает на четвертый вход 51 блока 30 формирования импульсов (момент t4), в результате чего появление импульсов на первом выходе блока 30 прекращается. При завершении оборота шпинделя (возврата точки А шаблона в исходное положение, точку X, фиг.9) датчик 9 формирует на втором выходе 47 импульс, который устанавливает счетчики 19 и 20 в нулевое положение, поступает на первый вход блока 30 формирования и через
второй вход элемента ИЛИ 26 на вход обратного счета третьего счетчика 27 импульсов, уменьшая его содержимое на единицу (момент t5, операторы 33, 34, 17), Намотка остальных витков слоя катушки
осуществляется аналогично.
При намотке последнего витка слоя (число в третьем счетчике 27 импульсов равно единице) на выходе 52 второго элемента ИЛИ-НЕ 29 появляется единичный сигнал
который поступает на третий вход блока 30 формирования импульсов, на первый вход задатчика 14 направления, на вход элемента НЕ 24, на вход разрешения вывода данных третьего регистра 22 и на четвертый
вход задатчика 5 скорости. Поступление сигнала 52 на первый вход задатчика 14 при намотке первого (и каждого нечетного) слоя катушки приводит к изменению направления переброса последнего витка относительно направления раскладки остальных витков слоя (оператор 18)
С выхода элемента НЕ 24 на вход разрешения вывдда данных второго регистра 21 поступает нулевой сигнал, что вызывает переход выходов последнего в состояние с высоким выходным сопротивлением, и на первую группу входов второго компаратора 23 поступают сигналы с выходов третьего регистра (операторы 19,35). Поэтому переброс последнего витка слоя катушки будет осуществляться на величину, равную половине диаметра провода.
Поступление сигналов на третий и четвертый входы задатчика 5 скорости вызывает появление на втором входе регулятора 6 скорости аналогового сигнала, обеспечивающего малую частоту вращения электродвигателя 7 при намотке последнего витка каждого слоя катушки (оператор 21).
После окончания намотки последнего витка слоя, которая происходиттак, как описано выше, датчик 9 формирует на втором выходе 47 импульс, который устанавливает третий счетчик 27 импульсов в нулевое положение, на выходе элемента ИЛИ-НЁ 29 сигнал 52 изменяется с единичного на нулевой, а на выходе элемента ИЛИ-НЕ 28 возникает единичный сигнал (момент t6). С выхода элемента ИЛИ-НЕ 28 сигнал поступает на вход 36 программируемого контрол- лера 4. который уменьшает на единицу содержимое счетчика слоев, организованный в контроллере программно, фиксирует момент начала намотки последнего слоя катушки (операторы 25...27) и выдает об этом сигнал на втором выходе 43 управления нагрузкой.
При изменении сигнала 52 (с единичного на нулевой) на первом входе задатчик 14 определяет, какой слой наматывается (четный или нечетный) и посылает об этом сигнал 55 со своего второго выхода на шестой вход блока 30 формирования импульсов. При этом задатчик 14 обеспечивает раскладку провода при намотке очередного слоя катушки в направлении, противоположном при намотке предыдущего слоя.
При изменении сигнала 52 (с единичного на нулевой) на третьем входе блок 30 формирования импульсов устанавливается в состояние, которое обеспечивает загрузку уставки из четвертого регистра 25 в третий счетчик 27 импульсов.
Намотка второго (и каждого четного) слоя катушки происходит аналогичным образом. Исключение составляет то, что после поворота шпинделя на заданный угол (момент t.7. аналогичный t2) и загрузки третьего счетчика 27 импульсов (момент t8, аналогичный t3) блок 30 формирования импульсов посылает со второго выхода сигнал 49, который поступает через первый вход элемента ИЛИ 26 на вход обратного счета третьего счетчика 27 импульсов (момент t9), уменьшая его содержимое на единицу (операторы 29, 30). Намотка числа витков в четном слое на единицу меньшем, чем в нечетном слое, переброс провода на величину, равную диаметру провода, при намотке каждого витка слоя катушки, кроме последнего,-когда переброс осуществляется на величину, равную половине диаметра провода, перемещение раскладчика провода при н§- мотке витков каждого четного слоя я последнего витка нечетного слоя в направлении, противоположном перемещению раскладчика при намотке витков (кроме последнего) каждого нечетного слоя обеспечивают точную рядовую намотку катушек,
при которой каждый виток верхнего ряда лежит между витками нижнего ряда.
В момент начала намотки последнего слоя катушки (момент t10, фиг 4) на втором
5 43 выходе управления нагрузкой программируемого контроллера 4 появляется сигнал, который поступает на первый вход задатчика 5 скорости и который совместно с присутствующим на третьем входе 42 за0 датчика вызывает появление-на втором входе регулятора 6 скорости аналогового сигнала, обеспечивающего среднюю частоту вращения электродвигателя 7 при намотке последнего слоя катушки (операторы 36,
5 37).
Когда начинается намотка последнего витка катушки (момент t11), на выходе элемента ИЛИ-НЕ 29 возникает-единичный сигнал, который поступает на третий вход
0 блока 30 формирования импульсов и на четвертый вход задатчика 5 скорости, подготавливая точный останов шпинделя Поступление сигналов на первый, третий и четвертый входы задатчика 5 вызывает по5 явление на втором входе регулятора 6 скоростианалоговогосигнала, обеспечивающего ползучую частоту вращения электродвигателя 7 при намотке последнего витка катушки.
0 Точный останов шпинделя после намотки последнего витка катушки происходит по сигналу, возникающему на втором выходе 47 датчика 9 угловых перемещений (момент t12) Этот сигнал проходит на вход обратно5 го счета счетчика 27, устанавливая его в нулевое положение, в результате чего сигнал с выхода элемента ИЛИ-НЕ 28 поступает на второй вход задатчика 5 скорости, который выдает на второй вход регулятора скорости
0 6 нулевой потенциал (оператор 38). После окончания намотки катушки контроллер 4 обеспечивает возвращение механизмов станка в исходное положение (операторы 39...42), при этом осуществляется отрезка
5 .конца катушки и фиксация в блоке отрезки начала последующей катушки.
При отсутствии сигнала разрешения повторного цикла контроллер 4 отключает ре0 гулятор 6 скорости и устанавливает свой счетчик СТК в исходное положение (операторы 43 .45)
Индикация положений механизмов во время работы станка осуществляется на
5 пульте 1 оператора по сигнала«,поступаю- щим по первой группе 41 выходов программируемого логического контроллера 4 Отключение станка происходит при поступлении сигнала СТОП с пульта 1 оператора на один из входов первой группы входов 33
программируемого логического контроллера 4
Программируемый логический контроллер (фиг 5) представляет собой процессорное устройство, проблемно- ориентированное на задачи программно-логического управления технологическим оборудованием и выполнено так же, как например, микроконтроллер программируемый МКП-1. Процессорный блок 58 осуществляет сбор, цифровую обработку и вывод информации в соответствии с исполнительной программой, записанной в постоянное запоминающее устройство 60. Исполнительная программа обеспечивает преобразование инструкций, поступающих от управляющей программы в последовательность кодов машинного языка процес- сорного блока 58, реализующих эти инструкции. Управляющая программа - программа, написанная в кодах входного языка программируемого контроллера и обеспечивающая выполнение заданного алгоритма управления станком. Она размещается в оперативном запоминающем устройстве 59 и сохраняется при отключении питания контроллера, благодаря использованию источника энергонезависимого питания (батареи элементов), расположенного в устройстве 59.
В режиме Ввод программы осуществляется запись кодов команд управляющей программы в оперативное запоминающее устройство 59. Необходимая команда набирается оператором путем последовательного нажатия клавиш клавиатуры 64 пульта 63 управления. Код нажатой клавиши фиксируется в регистре клавиатуры блока 61 управления, который вырабатывает сигнал запроса прерывания. Обнаружив последний, процессорный блок 58 под управлением исполнительной программы, считываемой из постоянного запоминающего устройства 60, адресует регистр клавиатуры блока 61 управления, посылает сигнал чтения устройств ввода-вывода, инициируя передачу информации из регистра клавиатуры на шину 38 данных. Процессорный блок 58, считывая коды нажатых клавиш, формирует из них код команды и пересылает его в оперативное запоминающее устройство 59 по адресу, определяемому счетчиком команд, содержимое которого увеличивается на единицу по окончанию пересылки каждой команды. Вводимая команда совместно с текущим значением счетчика команд отображается на индикаторах 65 пульта 63 управления. При этом инициируемая информация поступает по шине данных от процессорного блока 58 и записывается
в ячейки памяти индикатора 65 пульта 63 управления, адреса которых определяется состоянием сигналов на шине 39 адреса. Запись информации осуществляется по сигналу 40 записи в устройство ввода-вывода. В автоматическом режиме работы обеспечивается управление станком в соответствии с алгоритмом, реализованном в виде управляющей программы, хранимой в опе0 ративном запоминающем устройстве 59. Таким образом, последнее является источником команд для процессорного блока 58, выборку которых он осуществляет по адресу, определяемому счетчиком команд,
5 размещенным в оперативном запоминающем устройстве 59. В соответствии с программой процессорный блок 58 опрашивает через первый параллельный интерфейс 57 состояния входов контроллера, осуществля0 ет логическое сравнение их с состояниями, предусмотренными программой, и по результатам сравнения посылает через второй параллельный интерфейс 62 команды на включение и отключение выходов контрол5 лера.
Задатчик 5 скорости (фиг.6) используется для подачи на второй вход регулятора скорости аналогового сигнала требуемой величины, что обеспечивает соответствую
0 щую частоту вращения электродвигателя шпинделя. Мультиплексор 66 напряжения обеспечивает коммутацию аналоговых сигналов с одного из нескольких входов на один выход в зависимости от кода на его
5 адресных входах. Величины аналоговых сигналов, соответствующие определенным частотам вращения шпинделя, устанавливаются с помощью подвижных контактов резисторов. Сигнал 56, поступаю0 щий на пятый вход задатчика в начале цикла намотки катушки, устанавливает триггер 69 в нулевое состояние, в результате чего с выхода элемента И-НЕ 68 на четвертый (общий) вход блока 67 элементов И поступает
5 разрешающий сигнал. На адресные входы мультиплексора 66 через блок 67 элементов , И поступает окд,-присутствующий на третьем 42, первом 43 и четвертом 52 входах задатчика.
0 Когда начинается намотка последнего витка последнего слоя катушки сигналы 52 и 43 приобретают единичное значение, элемент И 70 переводит триггер 69 в единичное состояние, а, когда намотка последнего вит5 ка заканчивается, единичный сигнал появляется на втором входе 36 задатчика. В результате этого элемент И-НЕ 68 выдает нулевой сигнал на четвертый вход блока 67 элементов И, который формирует нулевой код на адресных входах мультиплексора 66
независимо от кода, присутствующего на входах 42,43 и 52 задатчика. На выход мультиплексора (задатчика) в этом случае передается нулевой потенциал.
Задатчик 14 направления (фиг.7) предназначен для определения направления раскладки провода при намотке слоя катушки. При этом на одном из первых выходов48 присутствует сигнал перемещения раскладчика влево при Т74.Вх 52 VT74, на другом из первых выходов 48 - если это условие не выполняется, сигнал перемещения раскладчика вправо. Импульс 56, поступающий на второй вход задатчика в начале цикла намотки, устанавливает триггер 74 в нулевое состояние, которое соответствует намотке первого (любого нечетного) слоя. Элемент И 73 закрыт, так как на первом входе 52 задатчика нулевой сигнал, на обоих входах элемента ИЛИ 72 нулевые сигналы, поэтому элемент НЕ 71 выдает единичный сигнал, соответствующий перемещению раскладчика, например, вправо.
При намотке последнего витка нечетного слоя на первом входе 52 появляется единичный сигнал, в результате чего элементы И 73 и ИЛИ 72 также выдают единичный сигнал, соответствующий в рассматриваемом случае перемещению раскладчика влево. После окончания намотки последнего витка на первом входе 52 сигнал изменяется на нулевой, триггер 74 устанавливается в единичное состояние, которое соответствует намотке второго (любого четного) слоя. Сигнал об этом выдается на второй выход 55 задатчика с единичного выхода триггера 74, с которого проходит сигнал также на выход элемента ИЛИ 72 (о перемещении раскладчика «лево).
После окончания намотки четного-слоя изменение сигнала на первом 52 входе задатчика возвращает триггер 74 в нулевое состояние и процесс повторяется. ,
При включении устройства триггеры блока 30 формирования импульсов (фиг.8) устанавливаются снулевое состояние: 80 и 81 - сигналом 37, поступающим на второй вход блока; 82 - сигналом 47, поступающим на первый вход блока. После поворота шпинделя на заданный угол на шестом входе 54 блока появляется единичный сигнал, который подается на третий вход элемента И 78. Первый импульс генератора 79 проходит через элемент И 78 и устанавливает триггер 82 в единичное состояние. Импульсы генератора 79,- начиная со второго, проходят через элемент И 77 на первый выход блока, обеспечивая переброс наматываемого витка катушки, а также подаются на первые входы элементов И 75, И 76.
Первый из импульсов, появляющихся на выходе элемента И 77, проходит через элемент И 76 на третий выход 50 блока и используется для загрузки числа в счетчик 5 витков. Одновременно этот импульс переводит триггер 81 в единичное состояние, запрещая прохождение импульсов через элемент И 76. После окончания намотки последнего витка слоя импульсом, поступаю- 0 щим на третий вход 52 блака, триггер 81 возвращается в исходное состояние.
При намотке четного слоя катушки на шестом входе 55 блока появляется единичный сигнал, который подается на второй 5 вход элемента И 85. $ этом случае импульс, появляющийся на выходе элемента И 76 и используемый для загрузки числа в счетчик витков, проходит через элемент-И 85 и устанавливает триггер 80 в единичное состоя- 0 ние. Следующий импульс, поступающий с выхода элемента И 77, проходит через эле- . мент И 75 на второй выход 49 блока и используется для уменьшения содержимого счетчика витков на единицу. Одновременно 5 этот импульс, переводит триггер 80 в нулевое состояние, запрещая прохождение импульсов через элемент И 75.
После окончания намотки каждого витка триггер 82 возвращается в исходное со- 0 стояние сигналом 47, поступающим на первый вход блока.
На выходах 33 пульта 1 (фиг.11) присутствуют нулевые сигналы, если ни одна из его кнопок 89...91 не нажата. При нажатии ка- 5 кой-либо кнопки ее контакт размыкается и на соответствующем выходе появляется единичный сигнал. Сигнал, поступающий на один из входов 41 пульта, включает один из усилителей 95...97 и один из индикаторов 0 92...94.
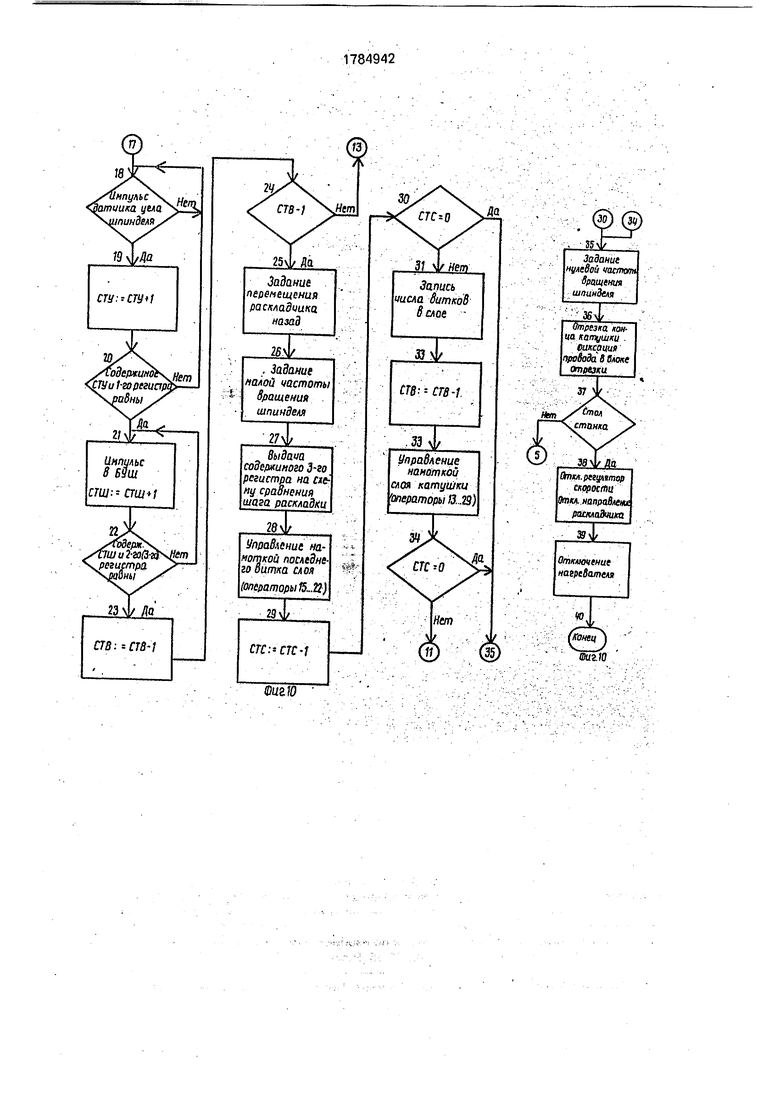
Алгоритм программы управления процессом намотки катушки, который реализуется устройством и пример которого приведен на фиг.10. обеспечивает макси- 5 мальный коэффициент заполнения витков в выделенном объеме под катушку При намотке первого слоя катушки (операторы 11...24) производится переброс каждого (кроме последнего) витка (в зоне переброса) 0 на величину, равную диаметру провода (оптимальному шагу размещения максимального количества витков в слое).
При намотке последнего витка первого слоя (переходе к намотке второго слоя) пе- 5 реброс производится в обратном направлении на величину, равную половине диаметра провода, что обеспечивает размещение витка во впадине между витками первого слоя (операторы 24. .28) Витки второго (и любого четного) слоя катушки номатываются с перебросом на величину, равную диаметру провода (операторы 29...33). При переходе к намотке третьего (и любого яоследующего нечетного) слоя необходимо после переброса последнего витка а величину, равную половине диаметра провода, изменить направление раскладчика (после оператора 34 в этом случае выполняются операторы, начиная с 11-го, в том числе 12). Технико-экономический эффект от применения предложенного устройства ожидается за счет повышения качества изготовленных катушек и снижения трудоемкости их изготовления
Формула изобретения Устройство для программного управления намоточным станком, содержащее дат- чики положений вспомогательных механизмов, программируемый логический контроллер, задатчик скорости, регулятор скорости, электродвигатель вращения шпинделя, тахогенератор, датчик угловых перемещений, приводы вспомогательных механизмов, блок управления шаговым двигателем, электродвигатель раскладчика, дешифратор адреса, элемент ЗАПРЕТ, первый и второй счетчики импульсов, блок формирования импульсов и пульт оператора, входы и выходы которого подключены соответственно к первой группе выходов управления нагрузками и к первой группе входов ввода дискретных сигналов программируемого логического контроллера, вторая группа входов ввода дискретных сигналов которого подключена к соответствующим выходам датчиков положений вспомогательных механизмов, шина адреса и выход сигнала записи программируемого логического контроллера соединены соответственно с адресными входами и входом синхронизации дешифратора адреса, первый выход управления нагрузкой программируемого логического контроллера соединен с первым входом регулятора скорости, вторая группа выходов и второй выходуправлениянагрузкамипограммируемого логического контроллера - соответственно с входами приводов вспомогательных механизмов и с первым входом задатчика скорости, выходом соединенного со вторым входом регулятора скорости, выходы которого подключены к электродвигателю вращения шпинделя, выход которого соединен механически со шпи- неделем, с входом тахогенератора, выходом соединенного с третьим входом регулятора скорости и с входом датчика угловых перемещений, первым выходом соединенного с прямым входом элемента ЗАПРЕТ, выход которого подключен к счетному входу первого счетчика импульсов, вход сброса которого соединен с вторым выходом датчика угловых перемещений и входом сброса второго счетчика импульсов, счетный вход которого подключен к первому выходу блока формирования импульсов и к импульсному входу блока управления шаговым двигателем, выходы которого подключены к электродвигателю раскладчика, выход
0 которого соединен механически с раскладчиком, отличающееся тем, что, с целью повышения быстродействия, в него введены задатчик направления, первый, второй, третий и четвертый регистры, пер5 вый и второй компараторы, третий счетчик
импульсов, элемент НЕ, первый и второй
элементы ИЛИ-НЕ и элемент ИЛИ, первый
вход которого соединен с вторым выходом
блока формирования импульсов, первый
0 вход которого подключен к второму выходу датчика угловых перемещений и к второму входу элемента ИЛИ, выходом соединенного с входом обратного счета третьего счетчика импульсов, вход записи которого
5 подключен к третьему выходу блока формирования импульсов, второй вход которого соединен с входом сброса третьего счетчика импульсов и выходом сигнала сброса программируемого логического контроллера,
0 шина данных которого соединена с информационными входами первого, второго, третьего и четвертого регистров, выходы четвертого регистра подключены к информационным входам третьего счетчика им5 пульсов, выход нулевого разряда которого соединен с инверсным входом второго элемента ИЛИ-НЕ и прямым бходом первого элемента ИЛИ-НЕ, а выходы остальных разрядов - с группой прямых входов второго
0 элемента ИЛИ-НЕ и первого элемента ИЛИ-НЕ, выход которого подключен к входу ввода дискретных сигналов программируемого логического контроллера и к второму входу задатчика скорости, третьим
5 входом соединенного с первым выходом управления нагрузкой программируемого логического контроллера, а четвертым - с первым входом задатчика направления, группой выходов подключенного к потенци0 альным входам блока управления шаговым двигателем, с третьим входом блока формирования импульсов, входом разрешения вывода данных третьего регистра, выходом второго элемента ИЛИ-НЕ и входом эле5 мента НЕ, выход которого подключен к входу разрешения вывода данных второго регистра, выходы которого объединены с выходами третьего регистра и первой группой входов второго компаратора, вторая группа входов которого соединена с выходами второго счетчика импульсов, а выход второго компаратора подключай к четвертому входу блока формирования импульсов, пятый вход которого соединен с инверсным входом элемента ЗАПРЕТ и выходом первого компаратора, подключенного второй и первой группами входов соответственно к выходам первого счетчика импульсов и первого регистра, вход записи которого соединен с первым выводом дешифратора
0
адреса, второй и третий выходы которого соединены с входами записи соответственно второго и третьего регистров, а четвертый выход дешифратора адреса соединен с входом записи четвертого регистра, пятым входом задатчика скорости и вторым входом задатчика направления, выходом подключенного к шестому входу блока формирования импульсов.
V. lwni «чЧЧгт - ,
,( Л Wlbrs,
, .I IN t-,5
, .Ь
г
.1 - R.HPt
/
Установка
блокоо устройстВа
8 нулеВое состояние
№16:--УстаВка №21:--Устаокаг
Кб 22- УстадкаЗ RG25::ycmaDKdtl
Iv
/
ПереВод СТК 8 положение соо/пВетстбую- щее очередному шику управления
Фиг. 2
, ,,,г,т,ч
U. M V«
№
содержимое счетчика команд соответствуету
КЪ1В--Устаока1 содержимому регистра 1ь присвоить значение равное уставке 1
7
SKA. регулятор 6
Выдать сигнал 42)
Выбор канат задатчика П
№ (25) Ф№.2
31
импульс В блок П
СТ20:--СТ20 1
26 1/-ЛО
ж
Контроль
состояний
датчиков
вспомогательны
механизмов
41
ри.прийодИВ спомоттельных механизмов на 8uHHon шаге управления
Ф№.2
ft j
ФигЗ
U r




| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления намоточным станком | 1989 |
|
SU1725184A1 |
| Устройство для программного управления намоточным станком | 1987 |
|
SU1451648A1 |
| Устройство для программного управления бандажировочным станком | 1989 |
|
SU1725187A1 |
| Намоточное устройство | 1981 |
|
SU994386A1 |
| Устройство контроля и управления технологическим комплексом для намотки изделий | 1989 |
|
SU1661721A1 |
| Устройство для управления намоточным станком | 1989 |
|
SU1817061A1 |
| Устройство для программного управления намоточным оборудованием | 1984 |
|
SU1273879A2 |
| Устройство для программного управления намоточным станком | 1985 |
|
SU1251029A1 |
| Устройство для управления намоткой многослойных электрических катушек | 1985 |
|
SU1350096A1 |
| Стенд для испытания энергоустановок электромобилей | 1985 |
|
SU1255890A1 |




taxed Ttxepomopa. 79
Зя8 игатель 7 включен
o Stixoi f7
I BuxcJtS
(четные cr
Itaoi fJloKaJ Сапный Втй
егго
Sum ддока 13 Ian} записи
tni
btxetHCZg
Счетнчй trod CT27
Нанент tptMem
Фиг. 3 (noejej t tut I
Эл-Зйигамель Вмючм
Вход записи (72
ВыхедМ . ЗатчиюЗ
8modttEt9 ВыходНПВ
Выход U контроллера 4
Выход 763
Мамонт времени
Л
-И
JS
36
9Ј 35
Г-V 3с
u - #-
Sr l
II
U
i/
-О
2Z
Л
f
Шг.10
Omai ptiyumop Скорости
ft направляй роаиаЗчшл
.39 ф
ШШГ)
оигЮ
Un
в
„.r-i/L.
i-i
9
92 Ъ
95
W
&
97
Фиг .77
