4 to О1 СО ел
Изобретение относится к электротехнике, а именно к автоматизированному электроприводу, и может быть использовано в вентильных электроприводах постоянного и переменного тока.
Целью изобретения является повышение надежности и качества регулирования.
I На чертеже приведена схема элек- т привода.
j Реверсивный вентильный электро- п|ривод содержит двигатель 1, подключённый к выходу преобразователя 2, з|адатчик 3 скорости и датчик 4 ско- 1)сти, подключенные через узел 5 с равнения к регулятору 6 скорости, вЬкод которого через последовательно
пенсирует внутреннюю отрицательную связь по ЭДС„ Переключатель 8 характеристик служит для согласования реверсивного сигнала блока 19 с нереверсивной регулировочной характерис- гикой блока 9.
Датчик I7 статического тока выдает сигнал 1 при наличии нагрузки на валу двигателя 1,
Узел 16 соответствия скорости предназначен для выявления соответствуя скорости заданному значению.
Электропривод работает следующим образом.
В исходном состоянии схемы задающее напряжение равно нулю. Равно нулю и напряжение на выходе блока 19 регулирования скорости. Напряжение
| название | год | авторы | номер документа |
|---|---|---|---|
| Реверсивный вентильный электропривод | 1983 |
|
SU1141552A1 |
| Вентильный электропривод постоянного тока | 1977 |
|
SU1010711A2 |
| РЕВЕРСИВНЫЙ ТИРИСТОРНЫЙ ЭЛЕКТРОПРИВОД | 1995 |
|
RU2103797C1 |
| Реверсивный электропривод с двухзонным регулированием частоты вращения | 1978 |
|
SU780135A1 |
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА | 1990 |
|
RU2011286C1 |
| Электропривод постоянного тока | 1980 |
|
SU924814A1 |
| Вентильный электропривод постоянного тока | 1977 |
|
SU995244A2 |
| Электропривод постоянного тока | 1977 |
|
SU681528A1 |
| Электропривод с двухзонным регулированием скорости | 1989 |
|
SU1765877A1 |
| Электропривод постоянного тока | 1978 |
|
SU817953A1 |
Изобретение относится к электротехнике и может быть использовано «для управления электродвигателями постоянного тока. Целью изобретения является повышение надежности и качества регулирования. Устройство содержит элемент И 18, один вход которого соединен с выходом узла 16, а другой - с датчиком 17 статического тока. Выход элемента И 18 соединен с входом блока 14 токоограниче- ний. В электроприводе величина пульсаций тока ограничена на уровне ,, уменьшается нагрев электродвигателя и отсутствует ложное срабатьтание токовой защиты. 1 ил.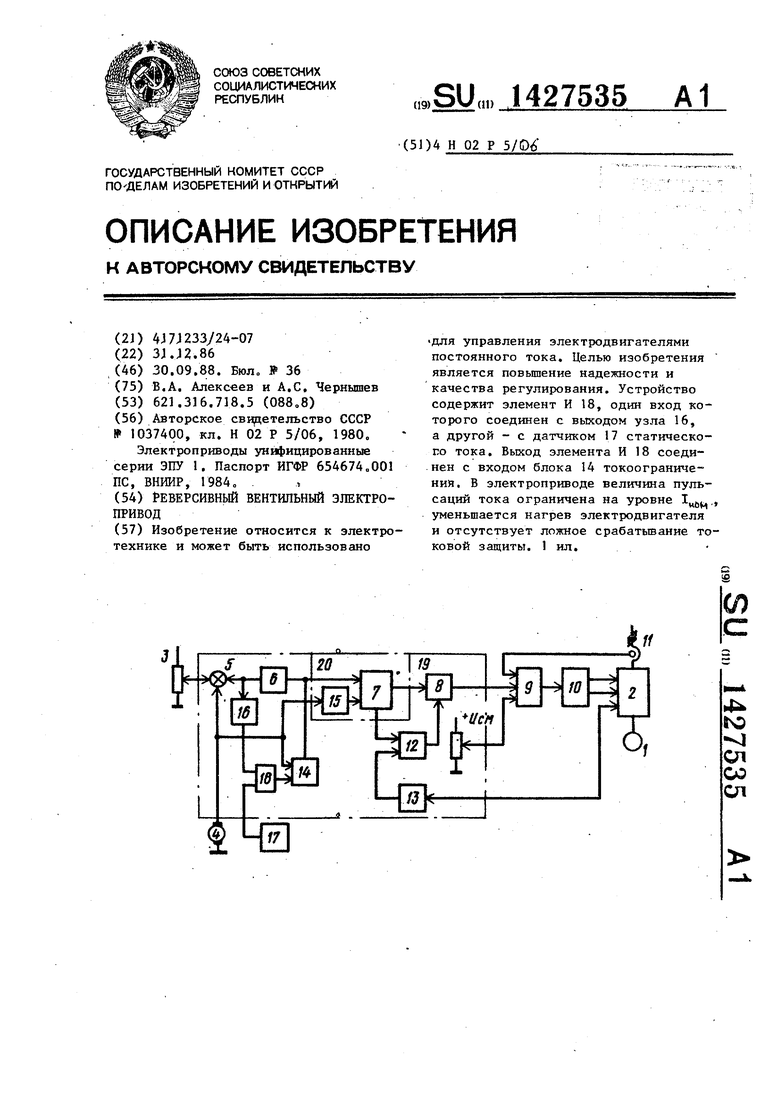
25
30
соединенные нелинейное звено 7, пере-20 на выходе преобразователя 2, соот- к-лючатель 8 характеристик, блок 9 зтравленияг и систему 10 импульсно- 4|азового управления подключен к вхо- 4у преобразователя 2„ Датчик 13 тока Соединен с вторым входом блока 9 управления, -Второй выход нелинейного ;|вена 7 и второй вход переключателя 8 характеристик соединены через блок J2 переключений, второй вход которого через датчик 13 проводимости тиристоров преобразователя 2 соединен G вторым выходом преобразователя 2, Блок 14 токоограничейия, выходом соединенный с выходом регулятора 6 скорости, а входом - с датчиком 4 скорости, .через преобразователь 15 ЭДС соединен с вторьи входом нелинейного звена 7 о Узел J6 соответствия скорости заданной соединен с выходом узла 5 сравнения Последовательно соединены датчик 17 статического тока и элемент И 18, при этом второй вход элемента И 18 соединен с выходом узла 16 соответствия скорости заданной, а выход - с вторым входом блока 14 токоограничения.
Блоки 5, 6, 7, В, 2, 13, 14, 15, 16, 18 образуют блок 19 регулирования скоростИо Нелинейное звено 7 и преобразователь 15 ЭДС двигателя 1 образуют узел 20 линеаризации характеристик электропривода в режиме прерывистого токи. Коэффициент пере дачи нелинейного звена 7 обратно пропорционален коэффициенту передачи ,5 Преобразователя 2, а коэффициент передачи преобразователя 15 имеет зависимость - arcsin Е, где Е - относительная ЭДС двигателя 1, и ком35
40
45
50
ветственно, отсутствует и двигатель 1 находится в неподвижном состоянии
При появлении управляющего сигна ла на выходе задатчика 3 скорости на выходе блока 19 регулирования ск рости появляется сигнал, который вызывает изменение углов регулирова ния преобразователя 2 в сторону , уменьшения На выходе преобразовате ля 2 появляется напряжение, по обмоткам якоря двигателя 1 начинает протекать ток и ej; o скорость начинает з еличиватьсяо Направление вра щения .двигателя 1 определяет блок 1 в зависимости от полярности входного сигнала, снимаемого с выхода узла 20 линеаризации. При достиже1 ии скорости двигателя 3 узел 16 соответствия, скорости меняет свой выход ной сигнал с О на 1,
При работе двигателя 1 в установившихся режимах на холостом ходу при вьща е сигнала 3 датчиком 37 статическод о тока на эдемен- та И 38 - сигнал 3, которая снижа ет установку блока 14 токоограничекия до номинального тока двигателя, В этом случае пульсации тока якоря двигателя, появляющиеся из-за пульсаций сигнала датчика 4 скорости и накладьшаемых помех, значительно ограничены по амплитуде, В этом случае снижается нагрев двигателя 1 неравномерность его вращения, повышается надежность работы электропри вода и нет ложных срабатьюаний токо вых защит. При работе электропривода на статическую нагрузку датчик 1 статического тока и, соответственно
на выходе преобразователя 2, соот-
ветственно, отсутствует и двигатель 1 находится в неподвижном состояниив
При появлении управляющего сигнала на выходе задатчика 3 скорости на выходе блока 19 регулирования скорости появляется сигнал, который вызывает изменение углов регулирования преобразователя 2 в сторону , уменьшения На выходе преобразователя 2 появляется напряжение, по обмоткам якоря двигателя 1 начинает протекать ток и ej; o скорость начинает з еличиватьсяо Направление вращения .двигателя 1 определяет блок 12 в зависимости от полярности входного сигнала, снимаемого с выхода узла 20 линеаризации. При достиже1 ии скорости двигателя 3 узел 16 соответствия, скорости меняет свой выходной сигнал с О на 1,
При работе двигателя 1 в установившихся режимах на холостом ходу при вьща е сигнала 3 датчиком 37 статическод о тока на эдемен- та И 38 - сигнал 3, которая снижает установку блока 14 токоограниче кия до номинального тока двигателя, В этом случае пульсации тока якоря двигателя, появляющиеся из-за пульсаций сигнала датчика 4 скорости и накладьшаемых помех, значительно ограничены по амплитуде, В этом случае снижается нагрев двигателя 1, неравномерность его вращения, повышается надежность работы электропривода и нет ложных срабатьюаний токовых защит. При работе электропривода на статическую нагрузку датчик 17 статического тока и, соответственно.
элемент И 18 вьщают сигналы О и уставка блока 14 токоограничения максимальна. Но в этом случае из-за наличия блокировки блока 12 по току нет его сканирования с нежелательными последствиями, как и в переходных режимах электропривода, из-за наличия динамических токов.
Использование данного электропривода позволит улучшить его динамические характеристики, сэкономить электроэнергию и повысить надежность и качество регулирования электропривода.
Формула изобретения
Реверсивный вентильный электропривод, содержащий электродвигатель, подключенный к выходу преобразователя, задатчик скорости и датчик скорости, подключенные через узел сравнения к регулятору скорости, выход которого через последовательио соединенные нелинейное звено, переключатель характеристик, блок управле
5
0
5
кия и систему импульсно-фазового управления подключен к входу преобразователя, датчик тока, соединенный с вторым входом блока управления, второй выход нелинейного звена и второй вход переключателя характеристик соединены через блок переключений, второй вход которого через датчик проводимости тиристоров преобразовав теля соединен с вторым выходом преобразователя, блок токоограничения, выходом соединенный с выходом регулятора, скорости, а входом - с датчиком скорости и через преобразователь ЭДС - с вторым входом нелинейного звена, узел соответствия скорости заданной подключен к выходу узла сравнения, отличающийся тем, что, с целью повьшения надежности и качества регулирования, в него введены последовательно соединенные датчик статического тока и элемент И, при этом второй вход элемента И соединен с выходом узла соответствия скорости заданной, а выход - с вторым входом блока токограничения.
| Следящий электропривод | 1982 |
|
SU1037400A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Способ получения смазки для обработки металлов | 1976 |
|
SU654674A1 |
