4
со о о: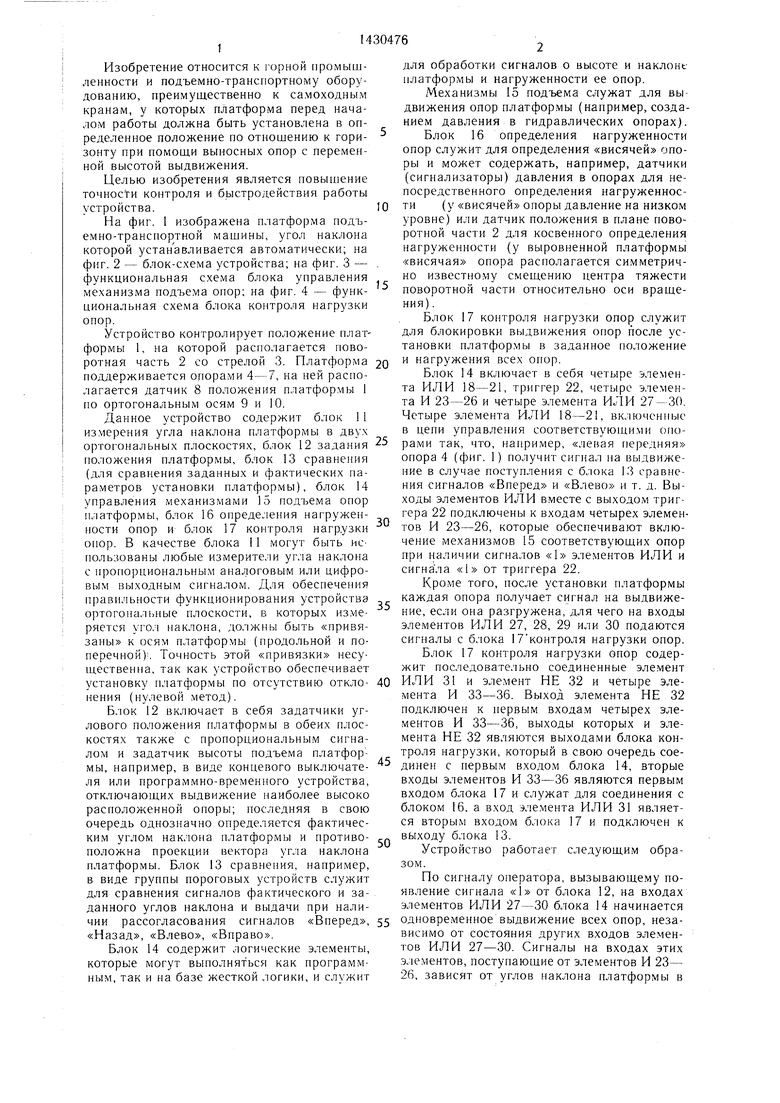

| название | год | авторы | номер документа |
|---|---|---|---|
| СТЕНД ДЛЯ АКУСТИКО-ЭМИССИОННОЙ ДИАГНОСТИКИ КОЛЕСНЫХ ПАР ГРУЗОВЫХ ВАГОНОВ | 2006 |
|
RU2316762C1 |
| УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО УПРАВЛЕНИЯ СТЕНДОМ ДЛЯ ШЕРОХОВКИ ПОВЕРХНОСТИ ЛИСТА | 1990 |
|
RU2009833C1 |
| СИСТЕМА УПРАВЛЕНИЯ ВЫНОСНЫМИ ОПОРАМИФу^'.Д 'i.-i.''--'—-• | 1971 |
|
SU422681A1 |
| БАРОКАМЕРА ДЛЯ МЕДИЦИНСКИХ ИССЛЕДОВАНИЙ | 1991 |
|
RU2061451C1 |
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ СТРЕЛОВОГО КРАНА ПО СИГНАЛАМ ДАТЧИКОВ ОПОР И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245294C2 |
| Система автоматизированного управления транспортными перемещениями ковша экскаватора-драглайна | 1989 |
|
SU1788163A1 |
| УСТРОЙСТВО ОХРАННОЙ СИГНАЛИЗАЦИИ ДЛЯ ОБНАРУЖЕНИЯ НЕСАНКЦИОНИРОВАННОГО ПРОНОСА РАДИОАКТИВНЫХ ВЕЩЕСТВ НА КОНТРОЛЬНО-ПРОПУСКНЫХ ПУНКТАХ | 2008 |
|
RU2397547C2 |
| Устройство для контроля и управления роторным экскаватором | 1984 |
|
SU1208135A1 |
| Устройство управления автоматом для укладки кирпича | 1990 |
|
SU1726265A1 |
| Устройство для контроля и управления процессом турбинного бурения | 1987 |
|
SU1461881A1 |
Изобретение относится к горной пром-сти и позволяет новысить точность контроля и быстродействия работы устр-ва. Для этого устр-во снабжено блоком управления (БУ) 14, механизмами 15 подъема опор платформы, блоком 17 контроля нагрузки опор и блоком 16 определения нагруженности опор. Блок 16 подключен к первому входу блока 17, выход которого соединен с первым входом БУ 14. К второму и третьему входам БУ 14 подключены соответственно блок 12 задания положения платформы и блок сравнения (БС) 13. К входу ЪС 13 подключены блоки измерения угла наклона I I платформы в двух ортогональных плоскостях и задания 12 положения платформы. Выход БС 13 соединен с вторым входом блока 17. При изменении угла наклона платформы БС 13 выдает сигнал рассогласования на выработку команд «Вперед. «Назад, «Влево, «Вправо. Блок 16 служит для определения «висячей опоры, а блок 17 - для блокировки выдвижения опор после установки платформы в заданное положение и нагруже- ния всех опор. Сигналы о высоте и наклоне платформы и нагруженности опор поступают на БУ 14. Последний м. б. выполнен программным или на базе жесткой логики и служит для обработки этих сигналов и выработки управляющих сигналов на механизмы 15 подъема для выдвижения опор платформы. 2 3. п. ф-лы, 4 ил. с (Л
Изобретение относится к г орной промышленности и подъемно-транспортному оборудованию, преимущественно к самоходным кранам, у которых платформа перед началом работы должна быть установлена в определенное положение по отношению к горизонту при помощи выносных опор с переменной высотой выдвижения.
Целью изобретения является повышение точности контроля и бь1стродействия работы устройства.
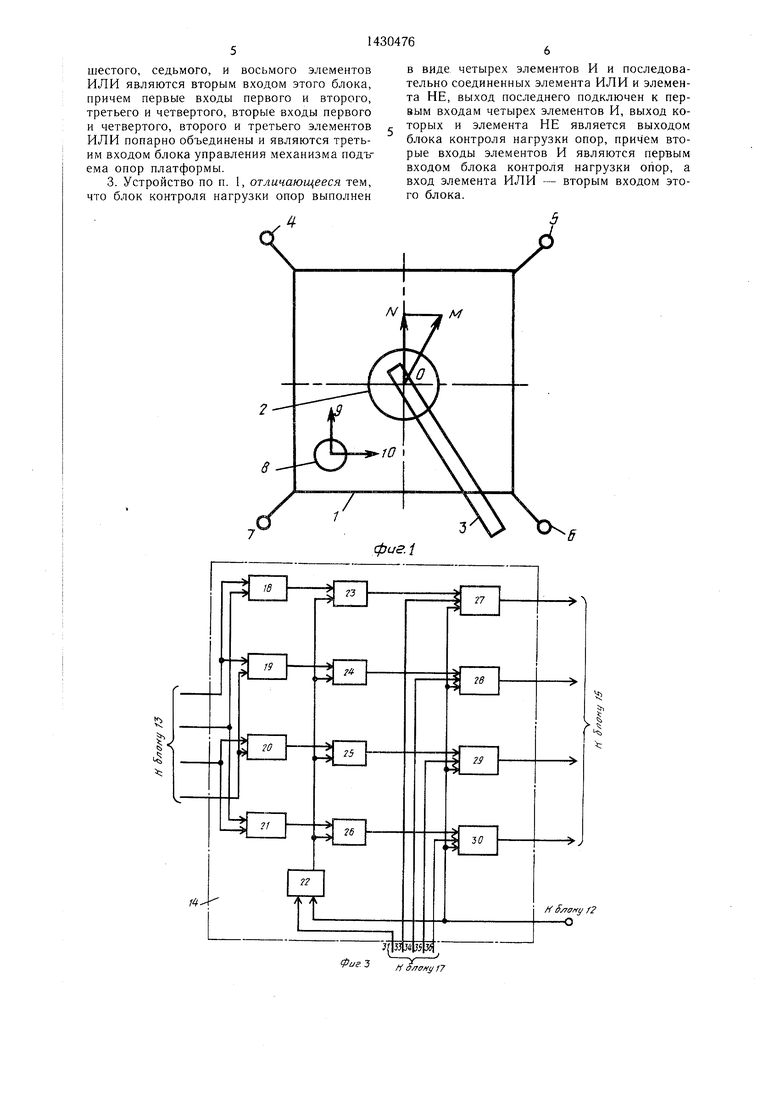
На фиг. 1 изображена платформа подъемно-транспортной машины, угол наклона которой устанавливается автоматически; на фиг. 2 - блок-схема устройства; на фиг. 3 - функциональная схема блока управления механизма подъема опор; на фиг. 4 - функциональная схема блока контроля нагрузки опор.
Устройство контролирует положение платформы 1, на которой располагается пово10
15
для обработки сигналов платформы и нагруженн
Механизмы 15 подъе движения опор платформ нием давления в гидра
Блок 16 определен опор служит для определ ры и может содержать, (сигнализаторы) давлени посредственного определ ти (у «висячей опоры уровне) или датчик полож ротной части 2 для косв нагруженности (у выров «висячая опора распол но известно.му смещени поворотной части относи ния) .
Блок 17 ко 1троля наг для блокировки выдвиже тановки платформы в за
ротная часть 2 со стрелой 3. Платформа 20 нагружения всех опор.
поддерживается опорами 4-7, на ней располагается датчик 8 положения платформы 1 по ортогональным осям 9 и 10.
Данное устройство содержит блок 1 1 измерения угла наклона платформы в дву.х ортогональных плоскостях, блок 12 задания положения платформы, блок 13 сравнения (для сравнения заданных и фактических параметров установки платформы), блок 14 управления механизмами 15 подъема опор платформы, блок 16 определения нагруженности опор и блок 17 контроля нагрузки опор. В качестве блока 11 могут быть использованы любые измерители угла наклона с пропорциональным аналоговым или цифровым выходным сигналом. Для обеспечения
Блок 14 включает в с та ИЛИ 18-21, триггер та И 23-26 и четыре эле Четыре элемента ИЛИ 1 в цепи управления соотв рами так, что, например опора 4 (фиг. 1) получит ние в случае поступления ния сигналов «Вперед и ходы элементов ИЛИ вме гера 22 подключены к вхо тов И 23-26, которые о чение механизмов 15 соо при наличии сигналов «I сигнала «1 от триггера
Кроме того, после уст
правильности функционирования устройства каждая опора получает сигнал на выдвиже- ортогопальные плоскости, в которых изме-ние, если она разгружена, для чего на входы
ряется угол наклона, должны быть «привя- элементов ИЛИ 27, 28, 29 или 30 подаются заны к осям платформы (продольной и по- сигналы с блока 17 контроля нагрузки опор.
Блок 17 контроля нагрузки опор содер45
перечной) Точность этой «привязки несу щественьш, так как устройство обеспечивает установку платформы по отсутствию откло- 40 нения (нулевой метод).
Блок 12 включает в себя задатчики углового положения платформы в обеих плоскостях также с пропорциональным сигналом и задатчик высоты подъема платформы, например, в виде концевого выключателя или программно-временпого устройства, отключающих выдвижение наиболее высоко расположенной опоры; последняя в свою очередь однозначно определяется фактическим углом наклона платформы и противо- Q положна проекции вектора угла наклона платформы. Блок 13 сравнения, например, в виде группы пороговых устройств служит для сравнения сигналов фактического и заданного углов наклона и выдачи при налижит последовательно соединенные элемент ИЛИ 31 и элемент НЕ 32 и четыре элемента И 33-36. Выход элемента НЕ 32 подключен к первым входам четырех элементов И 33-36, выходы которых и элемента НЕ 32 являются выходами блока контроля нагрузки, который в свою очередь соединен с первым входом блока 14, вторые входы элементов И 33-36 являются первым входом блока 17 и служат для соединения с блоком 16, а вход эле.мента ИЛИ 31 является вторым входом блока 17 и подключен к выходу блока 13.
Устройство работает следующим образом.
По сигналу оператора, вызывающему появление сигнала «1 от блока 12, на входах элементов ИЛИ 27-30 блока 14 начинается
чии рассогласования сигналов «Вперед, 55 одновременное выдвижение всех опор, неза- «Назад, «Влево, «Вправо.висимо от состояния других входов элеменБлок 14 содержит логические элементы, тов ИЛИ 27-30. Сигналы на входах этих которые могут выполняться как программным, так и на базе жесткой логики, и служит
элементов, поступающие от элементов И 23- 26, зависят от углов наклона платформы в
для обработки сигналов о высоте и наклоне платформы и нагруженности ее опор.
Механизмы 15 подъема служат для выдвижения опор платформы (например, созданием давления в гидравлических опорах).
Блок 16 определения нагруженности опор служит для определения «висячей опоры и может содержать, например, датчики (сигнализаторы) давления в опорах для непосредственного определения нагруженности (у «висячей опоры давление на низком уровне) или датчик положения в плане поворотной части 2 для косвенного определения нагруженности (у выровненной платформы «висячая опора располагается симметрично известно.му смещению центра тяжести поворотной части относительно оси вращения) .
Блок 17 ко 1троля нагрузки опор служит для блокировки выдвижения опор после установки платформы в заданное положение
нагружения всех опор.
Блок 14 включает в себя четыре эле.мен- та ИЛИ 18-21, триггер 22, четыре элемента И 23-26 и четыре элемента ИЛИ 27 - 30. Четыре элемента ИЛИ 18-21, включенные в цепи управления соответствующими опорами так, что, например, «левая передняя опора 4 (фиг. 1) получит сигнал па выдвижение в случае поступления с блока 13 сравнения сигналов «Вперед и «Влево и т. д. Выходы элементов ИЛИ вместе с выходом триггера 22 подключены к входам четырех элементов И 23-26, которые обеспечивают включение механизмов 15 соответствующих опор при наличии сигналов «I элементов ИЛИ и сигнала «1 от триггера 22.
Кроме того, после установки платформы
5
0
Q
жит последовательно соединенные элемент ИЛИ 31 и элемент НЕ 32 и четыре элемента И 33-36. Выход элемента НЕ 32 подключен к первым входам четырех элементов И 33-36, выходы которых и элемента НЕ 32 являются выходами блока контроля нагрузки, который в свою очередь соединен с первым входом блока 14, вторые входы элементов И 33-36 являются первым входом блока 17 и служат для соединения с блоком 16, а вход эле.мента ИЛИ 31 является вторым входом блока 17 и подключен к выходу блока 13.
Устройство работает следующим образом.
По сигналу оператора, вызывающему появление сигнала «1 от блока 12, на входах элементов ИЛИ 27-30 блока 14 начинается
тов ИЛИ 27-30. Сигналы на входах этих
элементов, поступающие от элементов И 23- 26, зависят от углов наклона платформы в
конкретный момент, а сигналы, поступающие от блока 17, имеют уровень «О (при невыравненной платформе на входах и выходе элемента ИЛИ 31 (фиг. 4) всегда имеют место сигналы «1, на выходе элемента НЕ 32 - сигнал «О и, следовательно, на входах и выходах элементов И 33-36 сигнал «О).
При достижении платформой заданной высоты сигнал блока 12 исчезает, тогда как платформа из-за рельефа местности и различной скорости выдвижения опор имеет, на- пример, наклон в сторону, обозначенную вектором ОМ (фиг. 1., наиболее высокое положение опоры 7), сигналы датчика 8 и блока 11 соответственно и сигналы блока 12 задания (для упрощения описания примем заданное положение платформы горизонтальным) образуют сигналы «1 на выходах «Вперед и «Вправо блока 13 сравнения и сигналы «О на выходах «Назад и «Влево этого блока, которые передаются на вход блока 14. В результате, по меньщей мере, на одном из входов элементов ИЛИ 18, 19, 20 появятся сигналы «Ь, тогда как на входах элемента ИЛИ 21, управляемых от блока 13, будут иметь место сигналы «О.
В результате на входах элемента И 26 и соответственно ИЛИ 30 будут иметь место сигналы «О и выдвижение опоры 7 прекратится.
С выходов элементов ИЛИ 18, 19 и 20 сигналы «1 поступают на входы элементов И 23, 24, 25, на другие входы которых также поступает сигнал «1 от триггера 22, установленного в это (первоначальное) состояние пусковым сигналом от блока 12. Таким образом, на входах и выходах элементов ИЛИ 27, 28 и 29 имеют место сигналы «1 и выдвижение других опор (4, 5, 6) продолжается.
При достижении следующей, например, опорой 6 высоты опоры 7 вектор ОМ преобразуется в вектор ON, а сигнал «Вправо с выхода блока 13 исчезает. В результате этого на входах элементов ИЛИ 20, И 26 и ИЛИ 29 будет иметь место сигнал «О и выдвижение опоры 6 прекратится.
При достижении одной из опор 4 или 5 высоты опоры 7 вектор ON преобразуется в точку О (с погрешностью, определяемой зоной нечувствительности блока 13 сравнения), сигнал «Вперед на выходе блока 13 исчезнет, на входах и выходах элементов ИЛИ 18 и 20, элементов И 23 и 24 и элементов ИЛИ 27, 28 будут иметь место сигналы «О и выдвижение в первом цикле установки опор прекратится.
Одновременно начинается выдвижение (нагружение) ненагруженной опоры по сигналам блока 17 (фиг. 4).
При установке платформы в заданное положение сигналы на выходе блока 13 сравнения и входах элемента ИЛИ 31 имеют уровень «О, в результате чего на входе элемента НЕ 32 будет иметь место сигнал «О, а на выходе появится сигнал «1.
0
5
0
5
0
Этот сигнал переведет триггер 22 (фиг. 3) в положение, когда на его выходе будет иметь место сигнал «О, блокирующий прохождение сигналов через элементы И 23-26. Одновременно сигнал «1 с выхода.элемента НЕ 32 появляется на входах элементов И 33-36, на другие входы которых поступают сигналы с блока 16, причем сигнал «1 имеет место только в цепи управления ненагруженной опоры (например, опоры 4). В результате на вы.ходе элемента И (33), входе и выходе элемента ИЛИ (27) появится сигнал «1, обеспечивающий продолжение выдвижения «висячей опоры 4 до момента ее нагружения (исчезновения сигнала «Ь на входе И 33) или незначительного (с погрещ- ностью срабатывания блока 13 сравнения) нарушения установки платформы (появление сигнала «I на входе и выходе элемента ИЛИ 31 и сигнала «О на выходе элемента НЕ 32). С исчезновением последнего сигнала «1 на входах элементов ИЛИ 27- 30 выдвижение опор прекращается и они фиксируются в заданном положении.
Формула изобретения
45
50
шестого, седьмого, и восьмого элементов ИЛИ являются вторым входом этого блока, причем первые входы первого и второго, третьего и четвертого, вторые входы первого и четвертого, второго и третьего элементов ИЛИ попарно объединены и являются третьим входом блока управления механизма подъема опор платформы.
J
Фс/г 3
в виде четырех элементов И и последовательно соединенных элемента ИЛИ и элемента НЕ, выход последнего подключен к первым входам четырех элементов И, выход которых и элемента НЕ является выходом блока контроля нагрузки опор, причем вторые входы элементов И являются первым входом блока контроля нагрузки опор, а вход элемента ИЛИ - вторым входом этого блока.
фиг. i
1
fi о/грну /7
./ 5лону1
фигЛ
| Устройство для определения углов наклона строительных и дорожных машин | 1971 |
|
SU510072A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Устройство стабилизации положения рабочегоОРгАНАСТРОиТЕльНО-дОРОжНОй МАшиНы | 1972 |
|
SU518988A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
