Изобретение относится к устройствам управления автоматом укладки силикатного кирпича.
Цель изобретения - повышение точности управления.
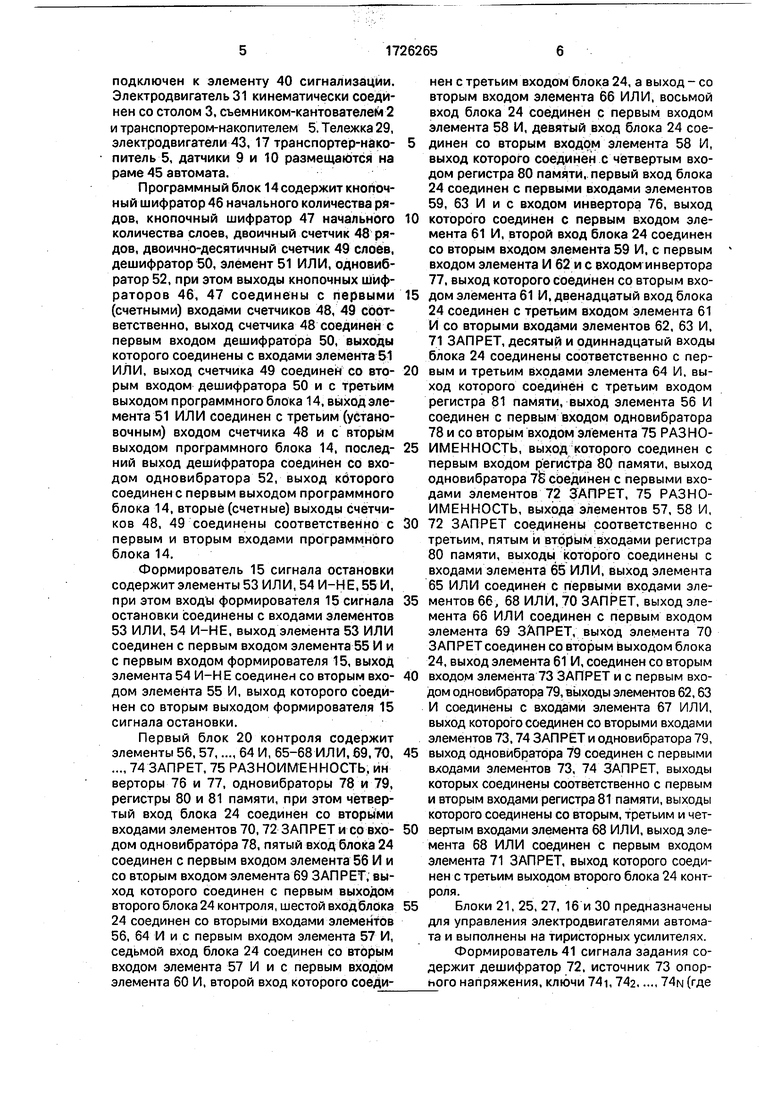
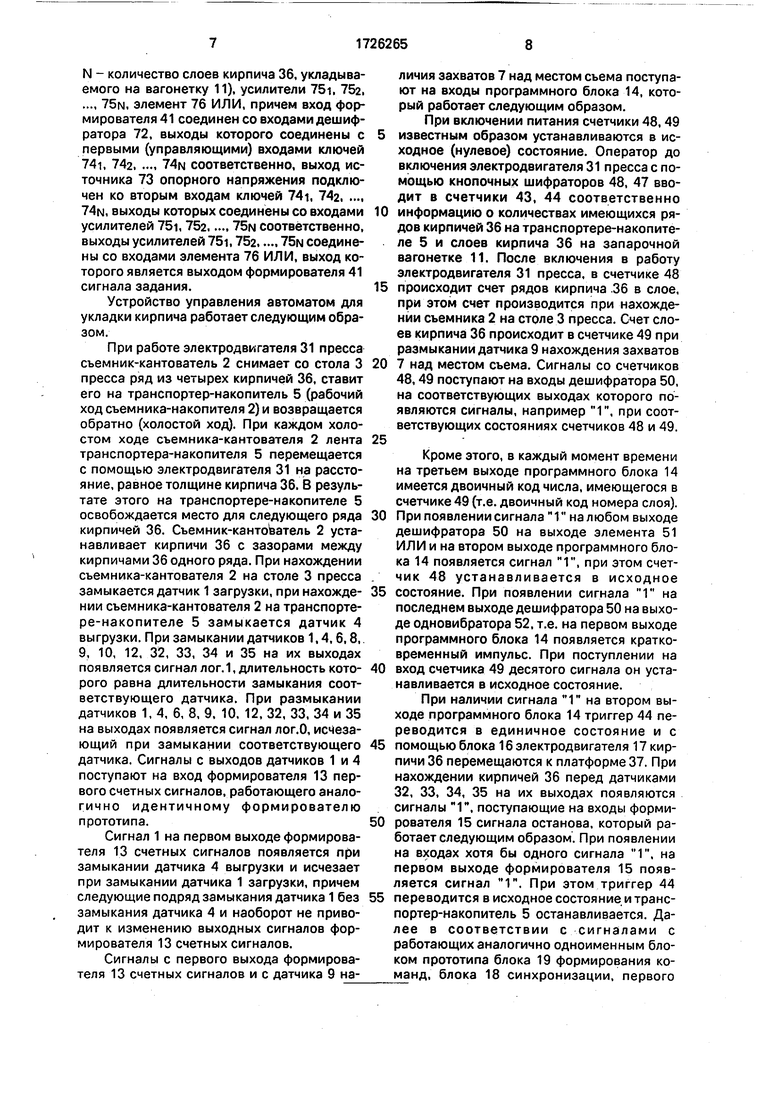
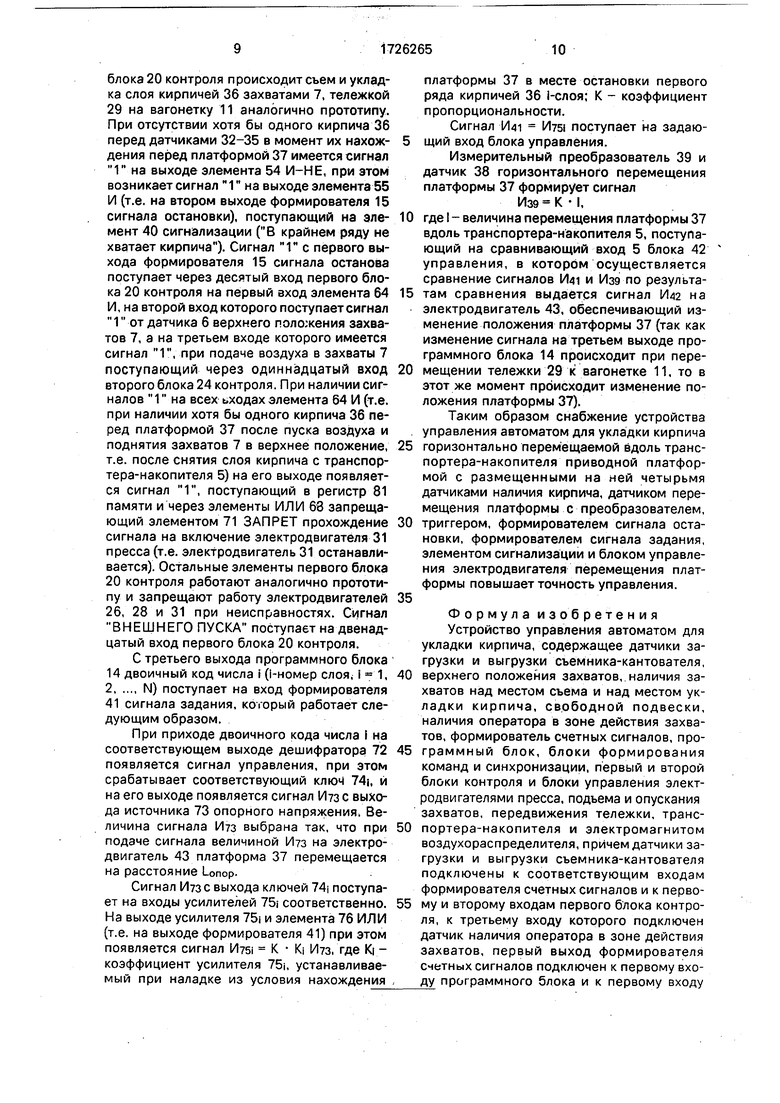
На фиг.1 приведена блок-схема устройства; на фиг.2 - вид А на фиг.1; на фиг.3-6 -- функциональные схемы программного блока, формирователя сигнала остановки, первого блока контроля, формирователя сигнала задания соответственно.
Устройство управления автоматом для укладки кирпича содержит датчик 1 загрузки съемника-кантователя 2 на столе пресса 3, датчик 4 выгрузки съемника-кантователя 2 на транспортере-накопителе 5, датчик 6 нахождения захватов 7 в верхнем положении, датчик 8 свободной подвески захватов 7, датчик 9 наличия захватов 7 над местом съема, датчик 10 наличия захватов 7 над местом укладки на вагонетку 11, датчик 12 наличия оператора в зоне действия захватов 7, формирователь 13 счетных сигналов, программный блок 14, формирователь 15 сигналов остановки, блок 16 управления электродвигателем 17 транспортера-накопителя 5, блок 18 синхронизации, блок 19 формирования команд, первый блок 20 контроля, блок 21 управления электромагнитом 22 воздухораспределителя 23, второй блок 24 контроля, блок 25 управления электродвигателем 26 подъема и опускания захватов 7, блок 27управления электродвигателем 28 передвижения тележки 29, блок 30 управления электродвигателем 31 пресса, датчики 32-35 наличия кирпича 36, размещенные на горизонтально перемещаемой вдоль транспортера-накопителя 5 платформе 37, последовательно соединенные датчик 38 горизонтального перемещения платформы 37 и измерительный преобразователь 39, элемент 40 сигнализации, формирователь 41 сигнала задания, блок 42 управления электродвигателем 43 перемещения платформы 37, триггер 44, причем датчик 1 загрузки подключен ко второму входу формирователя 13 счетных сигналов и ко второму BXO,;V первого блока 20 контроля, первый выход которого соединен с входом блока 25 управления электродвигателем 26 подъема и опу- екания захватов 7, второй выход - с входом 27 управления электродвигателем 28 передвижения тележки 29, третий выход - с входом блока 30 управления электродвигателем 31 пресса, датчик 4 выгрузки подключен к первому входу формирователя 13 счетных сигналов и к первому входу первого блока 20 контроля, третий вход которого подключен к датчику 12 наличия оператора в зоне действия захватов 7, а на двенадцатый вход кото
рого поступает внешний сигнал включения пресса, датчик 6 верхнего положения захватов 7 подключен к третьему входу блока 19 формирования команд и к шестому входу первого блока 20 контроля, датчик 8 свободной подвески захватов 7 подключен к четвертому входу блока 19 формирования команд и к седьмому входу первого блока 20 контроля, датчик 9 наличия захватов 7 над местом съема (над транспортером-накопителем 5) подключен ко второму входу программного блока 14, шестому входу блока 19 формирования команд и к девятому входу первого блока 20 контроля, датчик 10 наличия захватов 7 над местом укладки (над вагонеткой 11) подключен к пятому входу блока 19 формирования команд и к восьмому входу первого блока 20 контроля, четвертый и пятый вход которого соединены соответственно с первым и вторым выходами блока 19 формирования команд, первый выход формирователя 13 счетных сигналов соединен с первым входом программного блока 14 и с первым входом блока 18 синхронизации, первый и второй выход которого соединены с первым и вторым входами блока 19 формирования команд, соответственно второй выход формирователя 13 счетных сигналов соединен с третьим входом блока 1.8 синхронизации, второй выход программного блока 14 соединен с первым входом триггера 44, выход которого соединен с входом блока 16 управления электродвигателем 17 транспортера-накопителя бис четвертым входом блока 13 синхронизации, первый выход программного блока 14 соединен первым входом второго блока 24 контроля, второй вход которого соединен с третьим выходом блока 19 формирования команд, четвертый выход блока 19 формирования команд соединен со вторым входом блоку 18 синхронизации, с блоком 21 управления электромагнитом 22 воздухораспределителя 23 и с одиннадцатым входом первого блока 20 контроля, выход измери- -ельного преобразователя 39 соединен со вторым (сравнивающим) входом блока 42 управления электродвигателем 43 перемещения платформы 37, третий выход программного блока 14 соединен с входом формирователя 41 сигнала задания, выход которого соединен с первым (задающим) входом блока 42 управления электродвигателем 43 перемещения платформы 37, датчики 32-35 подключены к входам формирователя 15 сигнала остановки, первый выход которого соединен со вторым (установочным) входом триггера 44 и с десятым входом первого блока 20 контроля, второй о ход формирователя 15 сигнала остановки
подключен к элементу 40 сигнализации. Электродвигатель 31 кинематически соединен со столом 3, съемником-кантователем 2 и транспортером-накопителем 5. Тележка 29, электродвигатели 43, 17 транспортер-накопитель 5, датчики 9 и 10 размещаются на раме 45 автомата.
Программный блок 14 содержит кнопочный шифратор 46 начального количества рядов, кнопочный шифратор 47 начального количества слоев, двоичный счетчик 48 рядов, двоично-десятичный счетчик 49 слоев, дешифратор 50, элемент 51 ИЛИ, одновиб- ратор 52, при этом выходы кнопочных шифраторов 46, 47 соединены с первыми (счетными) входами счетчиков 48, 49 соответственно, выход счетчика 48 соединен с первым входом дешифратора 50, выходы которого соединены с входами элемента 51 ИЛИ, выход счетчика 49 соединен со вторым входом дешифратора 50 и с Третьим выходом программного блока 14, выход элемента 51 ИЛИ соединен с третьим (установочным) входом счетчика 48 и с вторым выходом программного блока 14, последний выход дешифратора соединен со входом одновибратора 52, выход которого соединен с первым выходом программного блока 14, вторые (счетные) выходы счетчиков 48, 49 соединены соответственно с первым и вторым входами программного блока 14.
Формирователь 15 сигнала остановки содержит элементы 53 ИЛИ, 54 И-НЕ, 55 И, при этом входы формирователя 15 сигнала остановки соединены с входами элементов 53 ИЛИ, 54 И-НЕ, выход элемента 53 ИЛИ соединен с первым входом элемента 55 И и с первым входом формирователя 15, выход элемента 54 И-НЕ соединен со вторым входом элемента 55 И, выход которого соединен со вторым выходом формирователя 15 сигнала остановки.
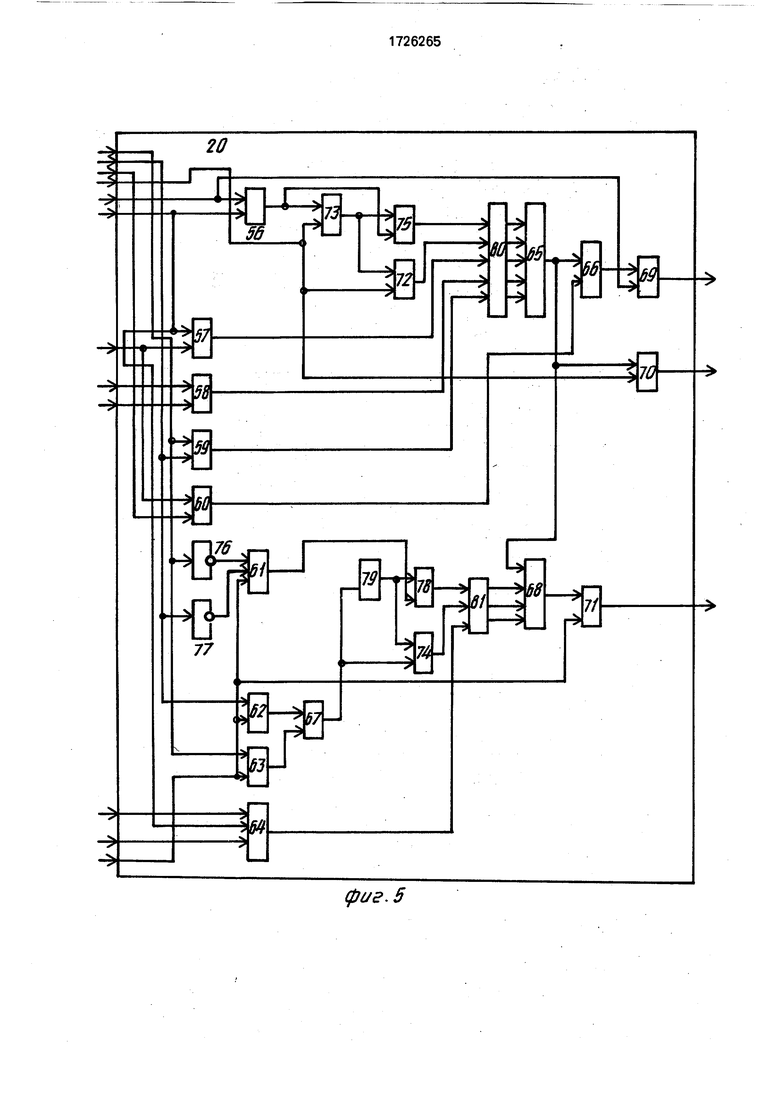
Первый блок 20 контроля содержит
элементы 56, 5764 И, 65-68 ИЛИ, 69,70,
..., 74 ЗАПРЕТ, 75 РАЗНОИМЕННОСТЬ, ин верторы 76 и 77, одновибраторы 78 и 79, регистры 80 и 81 памяти, при этом четвертый вход блока 24 соединен со вторыми входами элементов 70,72 ЗАПРЕТ и со входом одновибратора 78, пятый вход блока 24 соединен с первым входом элемента 56 И и со вторым входом элемента 69 ЗАПРЕТ, выход которого соединен с первым выходом второго блока 24 контроля, шестой вход блока 24 соединен со вторыми входами элементов 56, 64 И и с первым входом элемента 57 И, седьмой вход блока 24 соединен со вторым входом элемента 57 И и с первым входом элемента 60 И, второй вход которого соеДинен с третьим входом блока 24, а выход - со вторым входом элемента 66 ИЛИ, восьмой вход блока 24 соединен с первым входом элемента 58 И, девятый вход блока 24 соединен со вторым входом элемента 58 И, выход которого соединен с четвертым входом регистра 80 памяти, первый вход блока 24 соединен с первыми входами элементов 59, 63 И и с входом инвертора 76, выход
0 которого соединен с первым входом элемента 61 И, второй вход блока 24 соединен со вторым входом элемента 59 И, с первым входом элемента И 62 и с входом инвертора 77, выход которого соединен со вторым вхо5 дом элемента 61 И, двенадцатый вход блока 24 соединен с третьим входом элемента 61 И со вторыми входами элементов 62, 63 И, 71 ЗАПРЕТ, десятый и одиннадцатый входы блока 24 соединены соответственно с пер0 вым и третьим входами элемента 64 И, выход которого соединён с третьим входом регистра 81 памяти, выход элемента 56 И соединен с первым входом одновибратора 78 и со вторым входом элемента 75 РАЗНО5 ИМЕННОСТЬ, выход которого соединен с первым входом регистра 80 памяти, выход одновибратора 7S соединен с первыми входами элементов 72 ЗАПРЕТ, 75 РАЗНОИМЕННОСТЬ, выхода элементов 57, 58 И,
0 72 ЗАПРЕТ соединены соответственно с третьим, пятым и вторым входами регистра 80 памяти, выходы которого соединены с входами элемента 65 ИЛИ, выход элемента 65 ИЛИ соединен с первыми входами эле5 ментов 66, 68 ИЛИ, 70 ЗАПРЕТ, выход элемента 66 ИЛИ соединен с первым входом элемента 69 ЗАПРЕТ, выход элемента 70 ЗАПРЕТ соединен со вторым выходом блока 24, выход элемента 61 И, соединен со вторым
0 входом элемента 73 ЗАПРЕТ и с первым входом одновибратора 79, выходы элементов 62,63 И соединены с входами элемента 67 ИЛИ, выход которого соединен со вторыми входами элементов 73,74 ЗАПРЕТ и одновибратора 79,
5 выход одновибратора 79 соединен с первыми входами элементов 73, 74 ЗАПРЕТ, выходы которых соединены соответственно с первым и вторым входами регистра 81 памяти, выходы которого соединены со вторым, третьим и чет0 вертым входами элемента 68 ИЛИ, выход элемента 68 ИЛИ соединен с первым входом элемента 71 ЗАПРЕТ, выход которого соединен с третьим выходом второго блока 24 контроля.
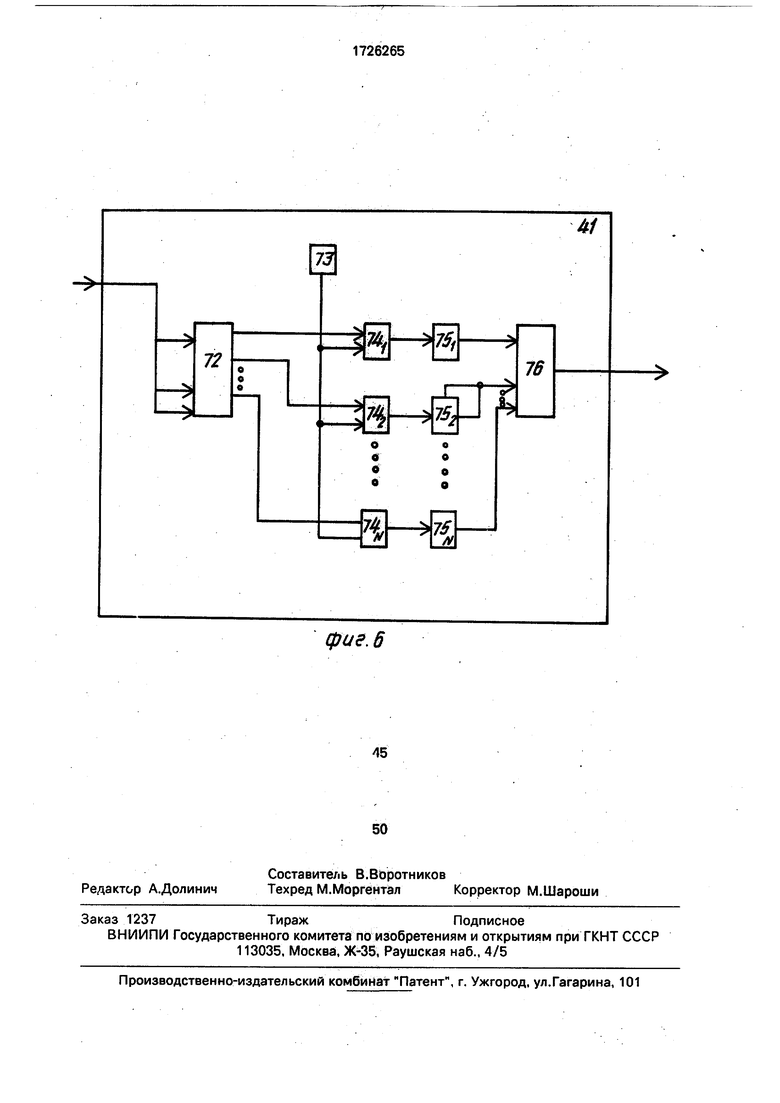
5 Блоки 21, 25, 27, 16 и 30 предназначены для управления электродвигателями автомата и выполнены на тиристорных усилителях. Формирователь 41 сигнала задания содержит дешифратор 72, источник 73 опорного напряжения, ключи 74i, 74274ы (где
N - количество слоев кирпича 36, укладываемого на вагонетку 11), усилители 75i, 752, .... 75м, элемент 76 ИЛИ, причем вход формирователя 41 соединен со входами дешифратора 72, выходы которого соединены с первыми (управляющими) входами ключей 74i, 742, .... 74N соответственно, выход источника 73 опорного напряжения подключен ко вторым входам ключей 74i, 742, .... 74м, выходы которых соединены со входами
усилителей 75i, 75275ы соответственно,
выходы усилителей 75i, 752,.... 75м соединены со входами элемента 76 ИЛИ, выход которого является выходом формирователя 41 сигнала задания.
Устройство управления автоматом для укладки кирпича работает следующим образом.
При работе электродвигателя 31 пресса съемник-кантователь 2 снимает со стола 3 пресса ряд из четырех кирпичей 36, ставит его на транспортер-накопитель 5 (рабочий ход съемника-накопителя 2) и возвращается обратно (холостой ход). При каждом холостом ходе съемника-кантователя 2 лента транспортера-накопителя 5 перемещается с помощью электродвигателя 31 на расстояние, равное толщине кирпича 36. В результате этого на транспортере-накопителе 5 освобождается место для следующего ряда кирпичей 36. Съемник-кантователь 2 устанавливает кирпичи 36 с зазорами между кирпичами 36 одного ряда. При нахождении съемника-кантователя 2 на столе 3 пресса замыкается датчик 1 загрузки, при нахожде- нии съемника-кантователя 2 на транспортере-накопителе 5 замыкается датчик 4 выгрузки. При замыкании датчиков 1,4,6,8, 9, 10, 12, 32, 33, 34 и 35 на их выходах появляется сигнал лог. 1, длительность кото- рого равна длительности замыкания соответствующего датчика. При размыкании датчиков 1, 4, 6, 8, 9, 10, 12, 32, 33, 34 и 35 на выходах появляется сигнал лог.О, исчезающий при замыкании соответствующего датчика. Сигналы с выходов датчиков 1 и 4 поступают на вход формирователя 13 первого счетных сигналов, работающего аналогично идентичному формирователю прототипа.
Сигнал 1 на первом выходе формирователя 13 счетных сигналов появляется при замыкании датчика 4 выгрузки и исчезает при замыкании датчика 1 загрузки, причем следующие подряд замыкания датчика 1 без замыкания датчика 4 и наоборот не приводит к изменению выходных сигналов формирователя 13 счетных сигналов.
Сигналы с первого выхода формирователя 13 счетных сигналов и с датчика 9 наличия захватов 7 над местом съема поступают на входы программного блока 14, который работает следующим образом.
При включении питания счетчики 48,49 известным образом устанавливаются в исходное (нулевое) состояние. Оператор до включения электродвигателя 31 пресса с помощью кнопочных шифраторов 48, 47 вводит в счетчики 43, 44 соответственно информацию о количествах имеющихся рядов кирпичей 36 на транспортере-накопителе 5 и слоев кирпича 36 на запарочной вагонетке 11. После включения в работу электродвигателя 31 пресса, в счетчике 48 происходит счет рядов кирпича .36 в слое, при этом счет производится при нахождении съемника 2 на столе 3 пресса. Счет слоев кирпича 36 происходит в счетчике 49 при размыкании датчика 9 нахождения захватов 7 над местом съема. Сигналы со счетчиков 48,49 поступают на входы дешифратора 50, на соответствующих выходах которого появляются сигналы, например 1, при соответствующих состояниях счетчиков 48 и 49.
Кроме этого, в каждый момент времени на третьем выходе программного блока 14 имеется двоичный код числа, имеющегося в счетчике 49 (т.е. двоичный код номера слоя). При появлении сигнала 1 на любом выходе дешифратора 50 на выходе элемента 51 ИЛИ и на втором выходе программного блока 14 появляется сигнал Н1, при этом счетчик 48 устанавливается в исходное состояние. При появлении сигнала 1 на последнем выходе дешифратора 50 на выходе одновибратора 52, т.е. на первом выходе программного блока 14 появляется кратковременный импульс. При поступлении на вход счетчика 49 десятого сигнала он устанавливается в исходное состояние.
При наличии сигнала 1 на втором выходе программного блока 14 триггер 44 переводится в единичное состояние и с помощью блока 16 электродвигателя 17 кирпичи 36 перемещаются к платформе 37. При нахождении кирпичей 36 перед датчиками 32, 33, 34, 35 на их выходах появляются сигналы 1, поступающие на входы формирователя 15 сигнала останова, который работает следующим образом. При появлении на входах хотя бы одного сигнала 1, на первом выходе формирователя 15 появляется сигнал 1. При этом триггер 44 переводится в исходное состояние и транспортер-накопитель 5 останавливается. Далее в соответствии с сигналами с работающих аналогично одноименным блоком прототипа блока 19 формирования команд, блока 18 синхронизации, первого
блока 20 контроля происходит съем и укладка слоя кирпичей 36 захватами 7, тележкой 29 на вагонетку 11 аналогично прототипу. При отсутствии хотя бы одного кирпича 36 перед датчиками 32-35 в момент их нахождения перед платформой 37 имеется сигнал 1 на выходе элемента 54 И-НЕ, при этом возникает сигнал 1 на выходе элемента 55 И (т.е. на втором выходе формирователя 15 сигнала остановки), поступающий на элемент 40 сигнализации (В крайнем ряду не хватает кирпича). Сигнал Г с первого выхода формирователя 15 сигнала останова поступает через десятый вход первого блока 20 контроля на первый вход элемента 64 И, на второй вход которого поступает сигнал 1 от датчика 6 верхнего положения захватов 7, а на третьем входе которого имеется сигнал Г, при подаче воздуха в захваты 7 поступающий через одиннадцатый вход второго блока 24 контроля. При наличии сигналов 1 на всех ьходах элемента 64 И (т.е. при наличии хотя бы одного кирпича 36 перед платформой 37 после пуска воздуха и поднятия захватов 7 в верхнее положение, т.е. после снятия слоя кирпича с транспортера-накопителя 5) на его выходе появляется сигнал 1, поступающий в регистр 81 памяти и через элементы ИЛИ 68 запрещающий элементом 71 ЗАПРЕТ прохождение сигнала на включение электродвигателя 31 пресса (т.е. электродвигатель 31 останавливается). Остальные элементы первого блока 20 контроля работают аналогично прототипу и запрещают работу электродвигателей 26, 28 и 31 при неисправностях. Сигнал ВНЕШНЕГО ПУСКА поступает на двенадцатый вход первого блока 20 контроля.
С третьего выхода программного блока 14 двоичный код числа i (i-номер слоя; 1 1,
2 N) поступает на вход формирователя
41 сигнала задания, который работает следующим образом.
При приходе двоичного кода числа i на соответствующем выходе дешифратора 72 появляется сигнал управления, при этом срабатывает соответствующий ключ 74|, и на его выходе появляется сигнал с выхода источника 73 опорного напряжения. Величина сигнала Иуз выбрана так, что при подаче сигнала величиной Иуз на электродвигатель 43 платформа 37 перемещается на расстояние Lonop.
Сигнал выхода ключей 74| поступает на входы усилителей 75; соответственно. На выходе усилителя 75i и элемента 76 ИЛИ (т.е. на выходе формирователя 41) при этом появляется сигнал К KI , где Ki - коэффициент усилителя 75i, устанавливаемый при наладке из условия нахождения
платформы 37 в месте остановки первого ряда кирпичей 36 i-слоя; К - коэффициент пропорциональности.
Сигнал И41 поступает на задающий вход блока управления.
Измерительный преобразователь 39 и датчик 38 горизонтального перемещения платформы 37 формирует сигнал Изэ К I,
0 где I - величина перемещения платформы 37 вдоль транспортера-накопителя 5, поступающий на сравнивающий вход 5 блока 42 управления, в котором осуществляется сравнение сигналов Й41 и Изэ по результа5 там сравнения выдается сигнал Vda на электродвигатель 43, обеспечивающий изменение положения платформы 37 (так как изменение сигнала на третьем выходе программного блока 14 происходит при пере0 мещении тележки 29 к вагонетке 11, то в этот же момент происходит изменение положения платформы 37).
Таким образом снабжение устройства управления автоматом для укладки кирпича
5 горизонтально перемещаемой вдоль транспортера-накопителя приводной платформой с размещенными на ней четырьмя датчиками наличия кирпича, датчиком перемещения платформы с преобразователем,
0 триггером, формирователем сигнала остановки, формирователем сигнала задания, элементом сигнализации и блоком управления электродвигателя перемещения платформы повышает точность управления.
5
Формула изобретения Устройство управления автоматом для укладки кирпича, содержащее датчики загрузки и выгрузки съемника-кантователя,
0 верхнего положения захватов, наличия захватов над местом съема и над местом укладки кирпича, свободной подвески, наличия оператора в зоне действия захватов, формирователь счетных сигналов, про5 граммный блок, блоки формирования команд и синхронизации, первый и второй блоки контроля и блоки управления электродвигателями пресса, подъема и опускания захватов, передвижения тележки, транс0 портера-накопителя и электромагнитом воздухораспределителя, причем датчики загрузки и выгрузки съемника-кантователя подключены к соответствующим входам формирователя счетных сигналов и к перво5 му и второму входам первого блока контроля, к третьему входу которого подключен датчик наличия оператора в зоне действия захватов, первый выход формирователя счетных сигналов подключен к первому входу программного блока и к первому входу
блока синхронизации, первый и второй выходы которого подключены соответственно к первому и второму входам блока формирования команд, первый и второй выходы которого соединены соответственно с четвертым и пятым входами первого блока контроля, первый выход программного блока подключен к первому входу второго блока контроля, второй вход которого соединен с третьим выходом блока формирования команд, четвертый выход которого подключен к входу блока управления электромагнитом воздухораспределителя и к второму входу блока синхронизации, третий вход которого соединен с вторым выходом формирователя счетных сигналов, датчик верхнего положения захватов подключен соответственно к третьему входу блока формирования команд и к шестому входу первого блока контроля, датчик свободной подвески подключен соответственно к четвертому входу блока формирования команд и к седьмому входу первого Ьлока контроля, датчик наличия захватов над местом укладки кирпича подключен к пятому входу блока формирования команд и к восьмому входу первого блока контроля, датчик наличия захватов над местом съема кирпича подключен к шестому входу блока формирования команд и к девятому входу первого блока контроля, выходы которого соединены с входами блоков управления электродвигателями подъема и опускания захватов, передвижения тележки и пресса, отличающееся тем, что, с целью повышения точности управления, оно снабжено горизонтально перемещаемой вдоль транспортера-накопителя приводной платформой, четырьмя датчиками наличия перемещения платформы с преобразователем, триггером, формирователем сигнала остановки, выполненным в виде элементов ИЛИ, И-НЕ и И, при этом входами формирователя сигнала остановки являются входы элемента ИЛИ и элемента И-НЕ, выход которого подключен к первому входу элемента И, выход которого является одним из выходов формирователя сигнала остановки, выход элемента ИЛИ подключен к второму входу элемента И и является другим выходом формирователя сигнала остановки, формирователем сигнала задания, выполненным в
виде дешифратора, источника опорного напряжения, N ключей и усилителей, где N - соответствует количеству слоев кирпича, укладываемого на вагонетку, и элемента ИЛИ, при этом входом формирователя сигнала задания являются входы дешифратора, выходы которого подключены соответственно к одним из входов ключей, к другим входам которых подключен выход источника опорного напряжения, выходы ключей через соответствующие усилители подключены к входам элемента ИЛИ, выход которого является выходом формирователя сигнала задания, элементом сигнализации и блоком управления электродвигателем перемещения платформы, причем второй выход программного блока подключен к первому входу триггера, выход которого подключен к четвертому входу блока синхронизации и к входу блока управления электродвигателем транспортера-накопителя, датчики наличия кирпича подключены к входам формирователя сигнала остановки, один из выходов которого подключен к элементу сигнализации, другой - к второму входу
триггера и к десятому входу первого блока контроля, одиннадцатый вход которого подключен к четвертому выходу блока формирования команд, третий выход программного блока через формирователь сигнала
задания подключен к первому входу блока управления электродвигателем перемещения платформы, к второму входу которого подключен датчик ее перемещения.
фиг. 5
фие. 6
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство автоматического управления автоматом для укладки кирпича | 1988 |
|
SU1648779A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМАТОМ ДЛЯ УКЛАДКИ КИРПИЧА | 1991 |
|
RU2028208C1 |
| Устройство для управления автоматом укладки кирпича | 1987 |
|
SU1560711A1 |
| Устройство для управления автоматом-укладчиком силикатного кирпича | 1987 |
|
SU1529178A1 |
| Система управления автоматом-садчиком кирпича | 1989 |
|
SU1648780A1 |
| Устройство для контроля работы пресса | 1988 |
|
SU1521607A1 |
| Система автоматического управления укладкой кирпича | 1985 |
|
SU1315325A1 |
| ШТАБЕЛИРОВЩИК ШТУЧНЫХ ИЗДЕЛИИ | 1972 |
|
SU422671A1 |
| Устройство для автоматического управления укладкой кирпича | 1983 |
|
SU1209544A1 |
| УСТАНОВКА ДЛЯ САДКИ СЫРЦЫ-КИРПИЧА НА ПЕЧНУЮ ВАГОНЕТКУ | 1992 |
|
RU2043192C1 |
Изобретение относится к управлению автоматом для укладки кирпича и позволяет повысить точность управления. Устройство содержит датчик 1 загрузки съемника-кантователя 2 на столе 3 пресса, датчик 4 выгрузки съемника-кантсвслэля, датчик 6 нахождения захватов 7 в верхнем положении, датчик 8 свободной подвески, датчик 9 наличия захватов над местом съема, датчик 10 наличия захватов над местом укладки на вагонетку, датчик 12 наличия оператора в зоне действия захватов, формирователь 13 счетных сигналов, программный блок 14, формирователь 15 сигналов остановки, блок 16 управления электродвигателем 17 транспортера-накопителя 5, блок 18 синхронизации, блок 19 формирования команд, первый 20 и второй 24 блок;.; контроля, блок 21 управления электрода i-.итом 22 воздухораспределителя 23. Устр-Bv. гакже содержит блок 25 управления электродвигателем 26 подъема и опускания захватов, блок 27 управления электродвигателем 28 передвижения тележки 29, блок 30 управления электродвигателем 31 пресса, датчики 32-35 наличия кирпича 36, размещенные на горизонтально перемещаемой вдоль транспортера-накопителя 5 на платформе 37, датчик 38 горизонтального перемещения платформы 37 с . элемент 40 сигнализации, фзрммрорати-; : 41 сигнала задания, блок 42 управления электродвигателем 43 перемещения п 31 формы 37, триггер 44.6 ил. СО с
| Устройство автоматического управления автоматом для укладки кирпича | 1988 |
|
SU1648779A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
