Изобретение относится к подъемно-транспортному оборудованию, а именно к устройствам защиты стреловых кранов. Устройства защиты стреловых кранов, использующие сигналы датчиков опор не нашли промышленного решения.
Нам известна система С 30-1 ВНИИСтройдормаша [1], используемая дополнительно к ограничителю грузоподъемности. Основу этой системы составляют датчики минимального давления, встроенные в гидросистему каждой опоры, которые срабатывают при снижении давления (усилия) в гидроопоре ниже установленной величины, например, 20 кг/см2 при максимуме давления, доходящего до 200 кг/см2.
С ростом опрокидывающего момента происходит разгрузка опор, расположенных за линией опрокидывания. При снижении давления ниже установленной величины электрические контакты датчиков давления размыкаются. Электрическая схема соединения контактов датчиков предусматривает возможность разгрузки одной опоры с размыканием контакта, если при этом другая опора, находящаяся за линией опрокидывания, имеет усилие (давление), большее минимально установленного значения. В случае невыполнения этого условия система отключает привода крана.
Известно устройство моментной защиты по патенту [2], содержащее датчики опор и устройство вычисления по сигналам датчиков опор координат центра масс крана. Для безопасной работы крана необходимо, чтобы координаты центра масс находились в пределах контура прямоугольника, расположенного внутри опорного контура (заштрихованный участок на фиг.1б).
На фиг.1а приведена схема статических нагрузок на кран с опорным контуром размером a· в с эксцентриситетом оси поворотной платформы n и углом стрелы в плане α (Обозначения опорного контура по патенту [2] приведена на фиг.1б).
С помощью сумматоров и вычитателей в устройстве по [2] образуются суммы:

и модули разностей

где Рi - усилие в i-ой опоре, Р - сумма усилий всех опор.
Условия устойчивости крана определяются выражениями:

где C=L1/L; D=li/1.
Рассмотрим функции номинальных усилий в опорах [3]





где М sinα , М cosα - составляющие опрокидывающего момента М относительно осей Y и X, Fn - момент, вызванный эксцентриситетом оси поворотной платформы. Выразив выражения (2) и (3) патента через функции номинальных усилий из (4)... (8) получим:

где M cosα =Bl; M sinα +Fn=AL, N=P.
В случае полной разгрузке опоры Rc=Р=0 усилия в остальных опорах равны





Последовательно подставив выражения (10)... (14) в (2) и (3), получим выражения для координат x, y центра масс при трехопорном опирании, которое полностью соответствует выражению (9) для четырехопорного опирания. В действительности центр масс при трехопорном опирании находится внутри треугольника. Поэтому в [2] предусмотрена дополнительно защита по минимуму усилия в опорах в соответствии с выражением Pi≤αР, где Pi - усилие в i-ой опоре, для чего используются четыре компаратора.
Рассмотренная система защиты по составляющим опрокидывающего момента не учитывает изменение знака момента, вызванного эксцентриситетом при повороте и не позволяет работу крана при отрыве от основания одной из опор, находящихся за линией опрокидывания, что допускается, например, "Правилами" Госгортехнадзора. Надежность, информативность функциональные и эксплутационные характеристики системы низки, что проистекает от способа “выключателя”, положенного в основу ее работы. Указанные недостатки устраняются в предлагаемом способе защиты.
Суть способа в синтезировании из сигналов датчиков опор: функции опрокидывающего момента и номинальных усилий в опорах крана. При этом опрокидывающий момент приводится к одному “окну” (шкале), размер которого соответствует максимальному опрокидывающему моменту и срабатыванию защиты и определяется постоянной величиной восстанавливающего момента. Способ позволяет создать устройства защиты, адаптивные к опрокидывающему моменту и распределению усилий в опорах, а также создать устройство установки крана из транспортного положения на опоры с соблюдением горизонтальности платформы и номинального распределения усилий опор.
Рассмотрим способ синтеза опрокидывающего момента из сигналов датчиков опор. Попарно суммируя сигналы датчиков, принадлежащих к каждому ребру опрокидывания и вычитая полусумму сигналов усилий всех опор для случаев четырехопорного и трехопорного опирания крана, соответственно выражения ((4),... ,(7), (10),... (13)) получим следующие равенства.




Из (15),... ,(18) следует, что суммы S7,... ,S10 не зависят от полной разгрузки одной опоры, например, RC=0. То же самое касается случая неполной разгрузки опоры [4]. Умножив (15) и (16) на в, а (17) и (18) на a получим


где F=N*-gh=const, N*=N-QГ, N - полная масса крана с грузом, GH, QГ - соответственно масса неповоротной части крана и груза, n - эксцентриситет.
Исключив из (19) слагаемое Fn, получим составляющую момента М sinα и определим полный момент М, равный

При этом функция полного опрокидывающегося момента определяется выражением.

где 
 Gi Gї d - соответственно массы: груза, головки стрелы, i-ой секции стрелы, противовеса и приведенной к нему поворотной платформы, х - полная величина выдвижения секций телескопической стрелы, l1 - длина первой базовой секции стрелы, ϕ - угол наклона стрелы, lkop - коррекция на деформацию стрелы, R, r - геометрические размеры.
Gi Gї d - соответственно массы: груза, головки стрелы, i-ой секции стрелы, противовеса и приведенной к нему поворотной платформы, х - полная величина выдвижения секций телескопической стрелы, l1 - длина первой базовой секции стрелы, ϕ - угол наклона стрелы, lkop - коррекция на деформацию стрелы, R, r - геометрические размеры.
Таким образом, синтезированный момент автоматически учитывает моментные нагрузки от масс стрелы и груза с учетом их функциональных связей с переменными параметрами стрелы.
В связи с тем, что по "Правилам" Госгортехнадзора устойчивость крана определяется относительно ребра его минимальной устойчивости, а в плане характеристики принимаются круговыми, уравнение устойчивости имеет вид.
где a - размер опорного контура, Кзу - коэффициент запаса устойчивости.
Ввиду независимости сумм S7,... ,S8 - функции (15),... ,(18) от распределения усилий в опорах они используются для синтеза номинальных нагрузок в опорах. Для этого образуют следующие суммы:

Номинальные усилия опор (24) используются для вычисления отклонения от них фактических усилий в опорах, определяемых сигналами соответствующих датчиков. Например, в случае трехопорного опирания крана (R*с=0) отклонения усилий Δ Ri определяются в соответствии выражениями (10),... ,(13) и (24)

В предлагаемом методе разности фактических, и номинальных усилий опор используется:
1. Для дополнительной защиты крана в процессе его работы с учетом отклонения усилий в опорах от номинальных, вызванных, например, просадкой, грунта под опорой или течью в ее гидросистеме.
2. Для правильной установки крана на опоры из транспортного состояния с одновременным соблюдением двух условий: горизонтальности платформы и номинального распределения усилий в них. Причем, если первое условие в какой-то мере выполняется известными устройствами, то второе, из-за отсутствия обратной связи по усилиям в опорах не может выполнено известным способом, что снижает номинальную устойчивость крана. Предлагаемый способ позволяет создание системы защиты, адаптивной к моментным нагрузкам и усилиям в опорах.
Реализация метода позволяет создание устройств защиты регулированием скоростей приводов крана в функции опрокидывающего момента или усилий в опорах, уменьшить колебания крана за счет активного их демпфирования сигналом отрицательно обратной связи по скорости изменения опрокидывающего момента и скорости подъема груза, а также исключить некоторые источники колебания, например, стрелы при ее “подъеме-опускании”, вызванные нелинейной передаточной функцией скорости толкатель-стрела.
В итоге повышаются надежность работы крана и расширяются его эксплутационные характеристики.
Проверка точности работы системы защиты, использующей предлагаемый способ на кране, проводится по его паспортным грузовым характеристикам.
УСТРОЙСТВО ДЛЯ РЕАЛИЗАЦИИ СПОСОБА ЗАЩИТЫ.
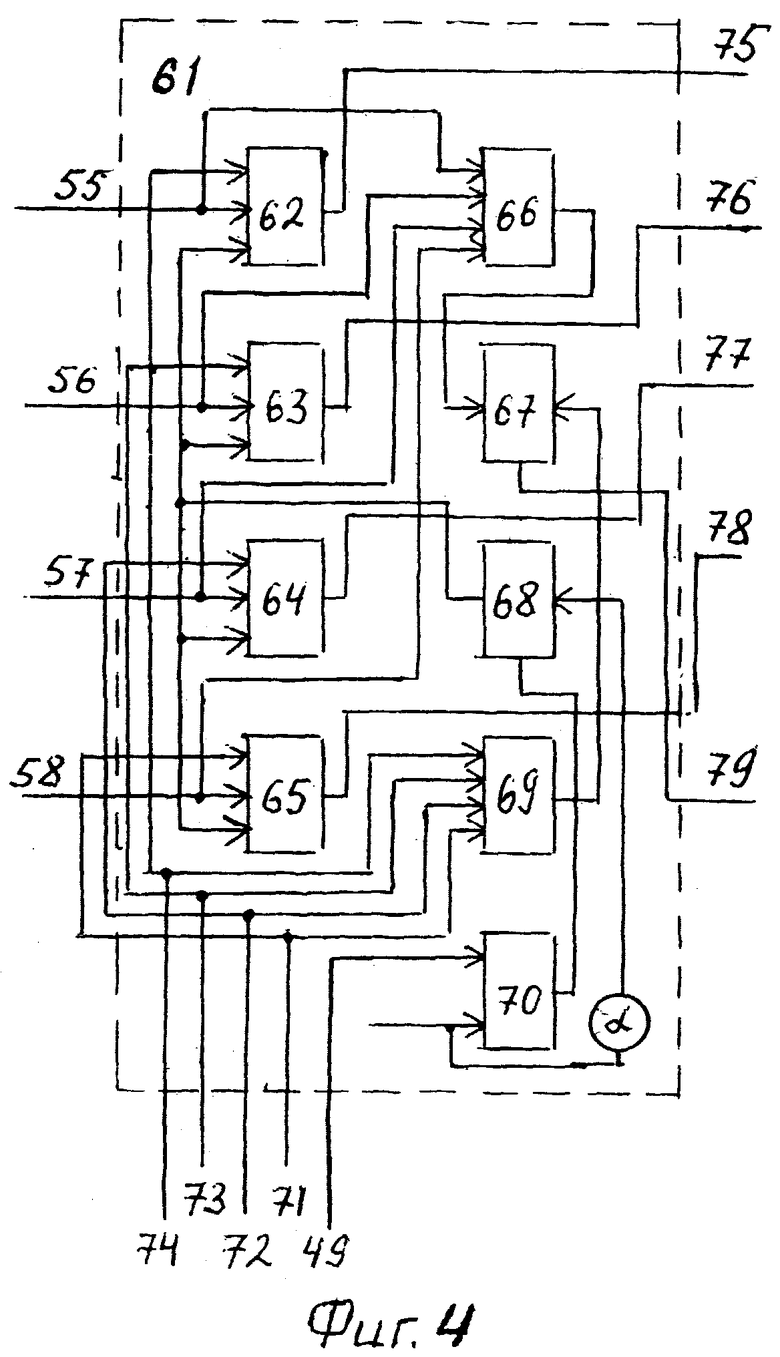
На фиг.2 приведена структурная схема моментной защиты крана, включающая в себя.
УЗЛЫ: 1 защиты по максимальному моменту, 24 четырехквадрантный креномер с индикаторами крена 25, 26 защиты по состоянию опор c индикаторами, 61 правильной установки крана на опоры из транспортного состояния.
СИЛОИЗМЕРИТЕЛИ: 2, 3, 5, 6, выносных опор.
ДАТЧИК УГЛА стрелы в плане опор 4.
Узел 1 моментной защиты содержит: силоизмерители 2, 3, 5, 6; трехвходовые сумматоры 7, 8, 9, 10 первой группы; двухвходовые сумматоры 12, 14, 20 второй группы; квадраторы 13, 15; двухвходовой сумматор сигналов квадраторов 16; коренатор 17; сумматор момента 19; дополнительный сумматор 18, четырехвходовой сумматор сигналов всех силоизмерителей 11; компаратор максимального момента 21; индикаторы: момента 22 и массы груза 23.
ПРИНЦИП РАБОТЫ. Функция опрокидывающего момента, независящая от фактических усилий в опорах, синтезируется из последних следующим образом: каждый сумматор 7, 8, 9, 10 связан двумя входами с соответствующими силоизмерителями 2, 3, 5, 6, а третьими вычитающими входами с коэффициентом передачи 0,5 с выходом сумматора 11. А именно: 7 с 2, 6 и 11; 8 с 3,5 и 11; 9 с 2,3 и 11; 10 с 2,3 и 11. Сигналы сумм S7,... ,S10 с выходов 46, 47, 48, 50 сумматоров первой группы, соответствующие выражениям (15),... ,(18), поступают на одни входы сумматоров 12, 14 второй группы и два входа сумматора 20 в следующем порядке: с 48 через диод на 14, с 46 через диод на 12, с 47 и 50 через диоды на 20. Вторые входы 12 и 14 связаны с напряжением Fn. Выходы 12 и 14 диодами связаны с входом квадратора 13, а выход 20 диодом связан с квадратором 15, выходные сигналы которых соответствующие функциям M2sin2αи M2cos2αсуммируются 16, выходом связанного с входом коренатора 17, выходом подключенного к одному входу сумматора момента 19, вторым вычитающим входом с коэффициентом передачи 0,5а, связанного с выходом сумматора 18, одним входом связанного с выходом сумматора 11, а вторым вычитающим входом с постоянным напряжением N*. Выходной сигнал 19, соответствующий опрокидывающему моменту относительно ребра минимальной устойчивости крана, поступает на входы: индикатора момента 22 и компаратора момента 21, вторым входом, связанного с постоянным восстанавливающим моментом, и индикатора момента 22. Выход 18 связан с индикатором массы груза 23.
Таким образом, опрокидывающий момент приводится к одному “окну”, размер которого определяется величиной восстанавливающего момента. При превышении переменного опрокидывающего момента восстанавливающего момента, приведенного к постоянной величине, срабатывает компаратор, выключающий привода.
В связи с тем, что момент является функцией массы груза и переменных параметров стрелы срабатывание защиты происходит при одном значении момента, но на разных вылетах стрелы в соответствии с паспортными грузовыми характеристиками крана.
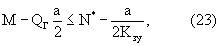
На фиг.3. приведена структурная схема узла 26 защиты крана по состоянию опор. Синтез номинальных усилий опор осуществляется с помощью трехвходовых сумматоров 28, 30, 32, 34 третьей группы, двумя входами связанных с выходами 46, 47, 48, 50 сумматоров первой группы, а третьими входами с выходом 49 сумматора 11. Сумматоры двумя входами с коэффициентом передачи 0,5 связаны с вышеперечисленными выходами следующим образам: 28 с 46 и 47; 30 с 47 и 48; 32 с 48 и 50, 34 с 46 и 50, а третьими вычитающими входами с коэффициентом передачи 0,75 с выходом 49. В вычитателях 29, 31, 33, 35 из сигналов силоизмерителей вычитаются их синтезированные номинальные значения с выходов сумматоров 28, 30, 32, 34. Элементы совпадения 36, 37, 38, 39 одними входами-диодами связаны с выходами вычитателей, а другими входами - с выходами квадрантора 40 положения стрелы, входом связанного с выходом датчика угла 4. Выходы элементов "И" связаны с соответствующими светоизлучателями индикатора состояния опор 27 и управляющими входами ключей 41, 42, 43, 44 силоизмерителей опор, расположенных диагонально противоположно светоизлучателям, установленным в конфигурации опор. Компаратор 45 одним входом связан с выходами ключей, входами связанных с силоизмерителями, а другим входом - с допустимым напряжением. Выход 45 связан с устройством отключения приводов.
ПРИНЦИП РАБОТЫ. Устройство непрерывно сравнивает фактические и синтезированные номинальные функции опор. Для этого выходы сумматоров 28, 30, 32, 34 соответственно связаны с одними входами вычитателей 29, 31, 33, 35, вторые входы которых связаны с соответствующими выходами 52, 51, 54, 53 силоизмерителей. При этом недогруженным опорам соответствуют разности отрицательного знака на выходах вычитателей, которые через диоды поступают на одни входы элементов И, вторые входы которых связаны с квадрантором положения стрелы. Из двух недогруженных опор с помощью логики выбирается "опасная опора", находящаяся в одном квадранте со стрелой. При этом срабатывает соответствующий элемент И и выходным сигналом “зажигает” индикатор “опасной опоры”, а также включает ключ силоизмерителя опоры, расположенной диагонально противоположно высвеченной опоре. Через открытый ключ сигнал выбранного силоизмерителя поступает на вход компаратора 45 и сравнивается с его минимально допустимым значением на втором входе. При понижении усилия в опоре ниже допустимой величины срабатывает 45 и выходным сигналом выключает привода крана.
Защита крана по состоянию опор осуществляется по минимуму усилия в опоре диагонально противоположной, опасно недогруженной.
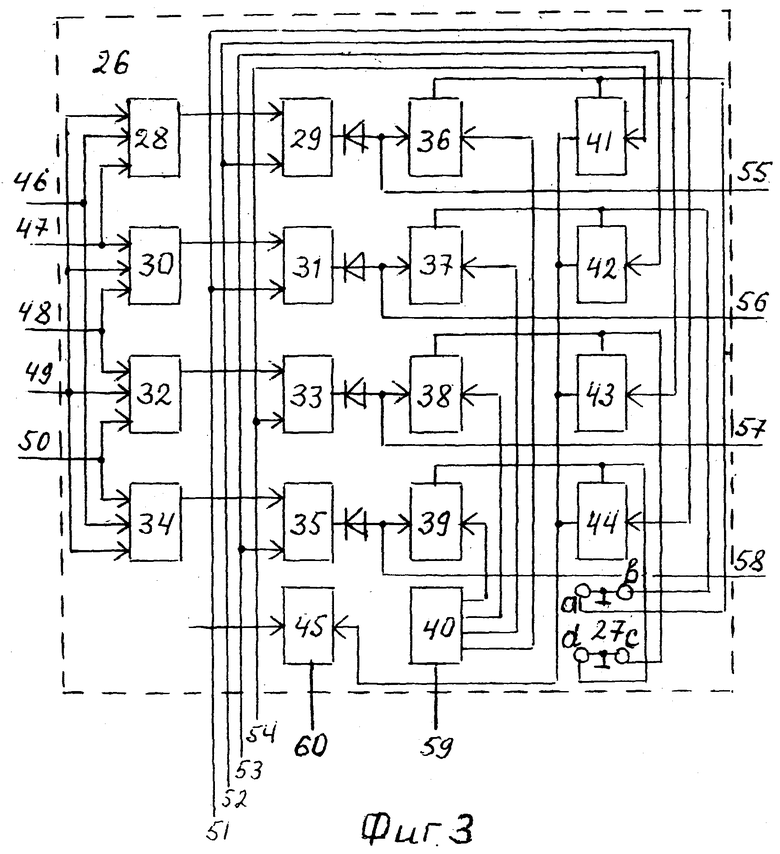
На фиг.4. приведена структурная схема узла 61 правильной установки крана из транспортного состояния на выносные опоры.
Она содержит. Сумматоры 62, 63, 64, 65, связанные одними входами с выходами 55, 56, 57, 58 вычитателей фактических и номинальных усилий, вторыми входами - с выходами 74, 73, 72, 71 четырехквадрантного креномера 24, а третьими входами через нормально замкнутый ключ 68 - с опорным напряжением. Управляющий вход ключа связан с выходом компаратора 70, входами связанного с опорным напряжением и выходом 49 сумматора сигналов силоизмерителей 11.
Два элемента 4ИЛИ-НЕ 66 и 69 входами связаны с выходами 55, 56, 57, 58 вычитателей и 71, 72, 73, 74 креномера соответственно, а выходами через элемент "И" 67 выходом 79 - со светоиндикатором установки крана на опоры.
ПРИНЦИП РАБОТЫ. В исходном состоянии усилия в опорах равны нулю поэтому на выходах 55, 56, 57, 58 вычитателей сигналы отсутствуют. Поэтому сигналы управления выдвижением гидроопор на выходах 75, 76, 77, 78 определяются сигналами на выходах креномера 71, 72, 73, 74 и опорным напряжением. По мере выдвижения опор и их касаний с основанием появляются сигналы на выходах соответствующих силоизмерителей. Ввиду большей чувствительности каналов креномера горизонтирование платформы может быть и при неполном нагружении опор (при касании колес крана). Когда напряжение на выходе 49 сумматора 11 достигнет заданной номинальной величины срабатывает компаратор 70, отключается ключ 68 и подача опорного напряжения на сумматоры 62... 65 прекращается. Теперь управление выдвижением опор осуществляется только отрицательными разностными сигналами усилий и сигналами креномера. При одновременном выполнении условий горизонтирования платформы и номинального распределения усилий в опорах сигналы на входах элементов 66 и 69 равны нулю, а на их выходах логические единицы, которые через элемент И “зажигают” индикатор завершения установки крана на опоры. В процессе работы крана система защиты выдает информацию о распределении усилий в опорах и защищает кран с учетом их состояния.
Источники информации
1. Авт. свидетельство СССР №698903.
2. Патент 2.277.027 (Франция) опубл. 04.10.76.
3. Вайнсон А.А. Подъемно-транспортные машины. М: - Машиностроение, - 1989.
4. Мамаев К.М. О функциональных связях нагрузок с сигналами силоизмерителей в системах защиты автокранов. РАН - Вестник Дагестанского научного центра г. Махачкала, 2000, №7, с.49-57.
| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ МОМЕНТНОЙ ЗАЩИТЫ КРАНА С ТЕЛЕСКОПИЧЕСКОЙ СТРЕЛОЙ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2003 |
|
RU2245293C2 |
| СПОСОБ АВТОМАТИЧЕСКОЙ ЗАЩИТЫ АВТОКРАНА ОТ ОПРОКИДЫВАНИЯ И ПЕРЕГРУЗОК С УПРАВЛЕНИЕМ СКОРОСТЯМИ ПРИВОДОВ И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 2011 |
|
RU2500608C2 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1975 |
|
SU565007A1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU737353A2 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU737352A2 |
| Устройство управления приводами механизмов стрелового крана | 1981 |
|
SU979266A1 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU732200A1 |
| Предохранительное устройство стрелового крана | 1982 |
|
SU1101402A1 |
| СИСТЕМА ЗАЩИТЫ ГРУЗОПОДЪЕМНОГО КРАНА | 2006 |
|
RU2316467C1 |
| Устройство для защиты трехфазного асинхронного электродвигателя от перегрузки | 1985 |
|
SU1310943A1 |

Группа изобретений относится к области подъемно-транспортного оборудования. В данном случае из сигналов датчиков опор синтезируются функции опрокидывающего момента и номинальных усилий опор. При этом опрокидывающий момент приводится к одному “окну”, верхняя граница которого соответствует максимуму опрокидывающего момента и срабатыванию защиты и определяется постоянной величиной восстанавливающего момента, зависящего от размеров опорного контура и массы противовеса. Созданное беспрограммное устройство является адаптивным к опрокидывающему моменту и распределению усилий в опорах и способствует правильной установке крана на опоры из транспортного состояния. При этом соблюдаются горизонтальность платформы и номинальное распределение усилий опор. Установка крана на опоры обеспечивается и при рабочем состоянии крана с выявлением отклонения фактических усилий в опорах от номинальных. Группа изобретений позволяет создать защиту с повышенными надежностью и точностью, что улучшает эксплутационные и динамические характеристики крана. 2 н. и 4 з.п. ф-лы, 4 ил.
| ШТАМП ДЛЯ ОБЖИМА ТРУБЧАТЫХ ЗАГОТОВОК | 2004 |
|
RU2277027C2 |
| Ограничитель грузоподъемности для кранов с телескопической стрелой | 1977 |
|
SU732200A1 |
| US 4133032 А, 02.01.1979 | |||
| RU 94011378 A1, 27.11.1996. | |||

