. Изобретение относится к геофизическим исследованиям скважин, в частности к телеизмерительным системам сбора и передачи информации от каро - тажных приборов (глубинных датчиков) на дневную- поверхность
Цель изобретения - повышение пропускной способности системы передачи данных из буровьк скважин.
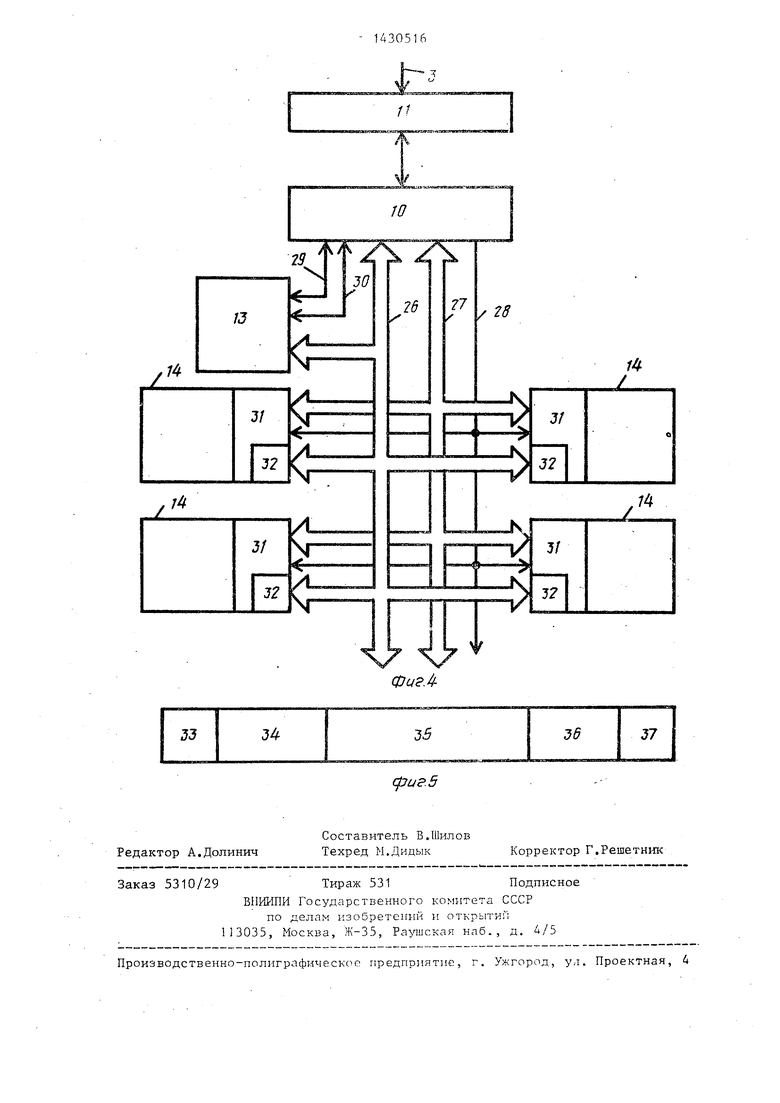
На фиг ., 1 представлена стрз ктурная схема системы передачи данных из буровых скважин; на фиг,2 - структурная схема блока анализа меток глубины совместно с генератором управляющих слов на фиг.З - структ фа управляющего сигналаJ на фиг.4 - структура схемы глубинной частиц на фиг.З - структура информационного сигнала.
Система передачи данных из буровых скважин (фиг„1) содержит наземную часть 1, глубинную часть 2 соединенные кабелем 3 связи. Наземная часть состоит из процессора 4, соединенного с модемом 5 и шинами 6. К модему 5 подключен кабрль 3 связи. К шинам б подключены приемники 7 информации и генератор 8 управляющих слов, вход которого соединен с блоком 9 анализа меток глубины. Глубинная часть состоит из процессора lOj соединенного с модемом 1 1 и шинами 1,2. Модем 11 соединен со вторым концом кабеля 3 связи. К шинам 12 подключены запоминающий блок 13 и вторичные преобразователи 14 глубинных датчиков,
На фиг„2 представлена структ фная схема блока 9 анализа меток глубины совместно с генератором 8 управляющих слов. Блок 9 анализа меток глубины состоит из контроллера 15, соединенного с датчиком 16 меток глубины и посредством шины 17 с блоком 18 памяти задания на каротаж Контроллер 15, кроме того, соединен с генератором 8 управляющих слов, а именно с регистром 19 посредством шины 20. Генератор 8 управляющих слов состоит из регистра 19 и интерфейсного эле мента 21, которьй.соединен с шиной 6
Управляющий сигнал (фиг.З) состоит из стартовой посылки 22j управляюще™ го слова 23, контрольного слова 24 и стоповой посылки 25,
На фиг,4 представлена более детальная структурная схема глубинной части. Гл бинная часть состоит из модема 115 соединенного с кабелем ,3 связи и процессором 10, К процессору
0
5
0
0
5
0
5
0
10 подключены адресная шина 26,, шина 27 данных и шина 28 управления. Запоминающий блок 13 подключен к адресной шине 26 и соединен с процессором 10 информационной шиной 29 и шиной 30 запись-считывание„ Вторичные преобразователи 14 глубинных датчиков подключены к шинам данных 27 и управления 28 посредством интерфейсных зле- ментов 31 и к адресной шине 26 через схемы 32 распознавания адреса, входящие в состав интерфейсных элементов.
Шины 26-30 (фиг„4) объединены.на фиг,1 под номером.
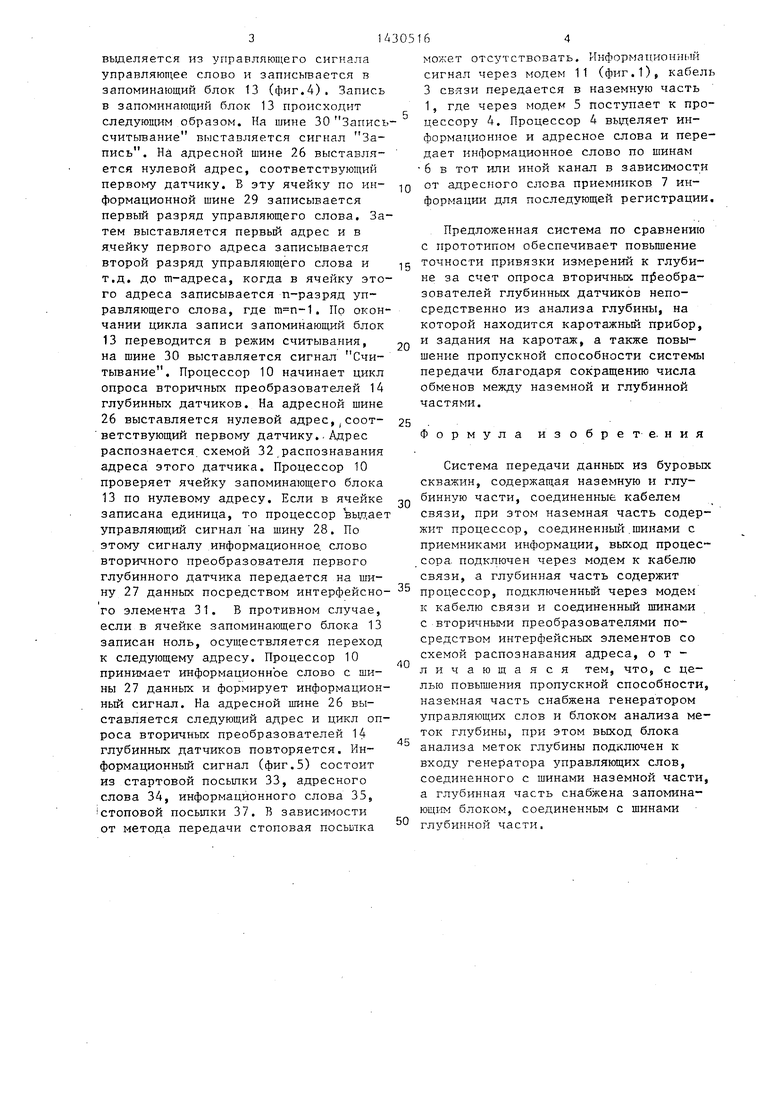
Информационныт{ сигнал (фиг.5) состоит из стартовой посылки 33 адресного слова 345 информационного слова 35,, контрольного слова 36 и стоповой посылки 37,
Устройство работает следующим образом.
Сигнал метки глубины с датчика 16 меток глубинг (фиг, 2) поступает в контроллер 15, который вычисляет глубину, на которой находится каротажный прибор и через шину 17 обраща-. ется к блоку, 18 памяти задания на каротаж, В соответствии с заданием .на каротаж контроллер 15 решает, какие конкретные глубинные датчики должны быть опрошены на данной глубине. Информация об этом по шине 20 поступает в генератор 8 управляющих слов, где формируется .задание на опрос датчиков. Генератор 8 управляющих слов состоит из п-разрядного регистра 19, где п-число глубинных датчиков в каротажном приборе г и интерфейсного элемента 21. Если глубинный датчик до.пжен быть опрошен, то в разряде, соответствующем номеру датчика от 1 до п записывается единица, в противном случае, ноль. При наличии большого количества датчиков з апрос может формироваться двумя рши более управляю- словами„ Процессор 4 наземной части (фиг„1) опрашивает генератор 8 управляющих слов по шинам 6, форми- рует управляющий сигналj состоящий из стартовой посьшки 22 (фиг.З), управляющего слова 23, контрольного слова 24 и стоповой посьшки 25, В зависимости от метода передачи стоповая посылка может отсутствовать. Управляющий сигнал через модем 5 (фиг.1), кабель 3 связи передается- в глубинную часть 2, где через модем 11 по- ступает к процессору 10„ Процессором
3U
выделяется из управляющего сигнала управляющее слово н записьгеается в запоминающий блок 13 (фиг.4), Запись в запоминающий блок 13 происходит следующим образом. На шиие 30 Запись считьгаание выставляется сигнал Запись. На адресной щине 26 выставляется нулевой адрес, соответствующий первому датчику. В эту ячейку по ин- формационной шине 29 записывается первый разряд управляющего слова. Затем выставляется первый адрес и в ячейку первого адреса записывается второй разряд управляющего слова и т.д. до тп-адреса, когда в ячейку этого адреса записывается п-разряд управляющего слова, где . По окончании цикла записи запоминающий блок 13 переводится в режим считывания, на шине 30 выставляется сигнал Считывание. Процессор 10 начинает цикл опроса вторичных преобразователей 14 глубинных датчиков. На адресной щине 26 выставляется нулевой адрес,,соот- ветствующий первому датчику..Адрес распознается схемой 32 распознавания адреса этого датчика. Процессор 10 проверяет ячейку запоминающего блока 13 по нулевому адресу. Если в ячейке записана единица, то процессор выдает управляющий сигнал на шину 28. По этому сигналу информационное, слово вторичного преобразователя первого глубинного датчика передается на шину 27 данных посредством интерфейсно-
го элемента 31. В противном случае, если в ячейке запоминающего блока 13 записан ноль, осуществляется переход к следующему адресу. Процессор 10 принимает информационное слово с шины 27 данных и формирует информационный сигнал. На адресной шине 26 выставляется следующий адрес и цикл опроса вторичных преобразователей 14 глубинных датчиков повторяется. Информационный сигнал (фиг.5) состоит из стартовой посылки 33, адресного слова 34, информационного слова 35, iстоповой посылки 37. В зависимости
ОТ метода передачи стоповая посьика
-JQ ig n 5 Q
0
5
0
164
может отсутствовать. Информационный сигнал через модем 11 (фиг.), кабель 3 связи передается в наземную часть 1, где через модем 5 поступает к процессору 4. Процессор 4 выделяет информационное и адресное слова и передает информационное слово по шинам
6 в тот или иной канал в зависимости от адресного слова приемников 7 информации для последующей регистрации.
Предложенная система по сравнению с прототипом обеспечивает повьппение точности привязки измерений к глубине за счет опроса вторичных ni5eo6pa- зователей глубинных датчиков непосредственно из анализа глубины, на которой находится каротажный прибор, и задания на каротаж, а также повышение пропускной способности системы передачи благодаря сокращению числа обменов между наземной и глубинной частями.
Формула изобрете. ния
Система передачи данных из буровых скважин, содержащая наземную и глубинную части, соединенные кабелем связи, при этом наземная часть содержит процессор, соединенный .шинами с приемниками информации, выход процес- сора подключен через модем к кабелю связи, а глубинная часть содержит процессор, подключенньй через модем к кабелю связи и соединенный шинами с вторичными преобразователями посредством интерфейсных элементов со схемой распознавания адреса, отличающаяся тем, что, с целью повышения пропускной способности, наземная часть снабжена генератором управляющ1-гх слов и блоком анализа меток глубины, при этом выход блока анализа меток глубины подключен к входу генератора управляющих слов, соединенного с шинами наземной части, а глубинная часть снабжена запоминающем блоком, соединенным с шинами глубинной части.
15
w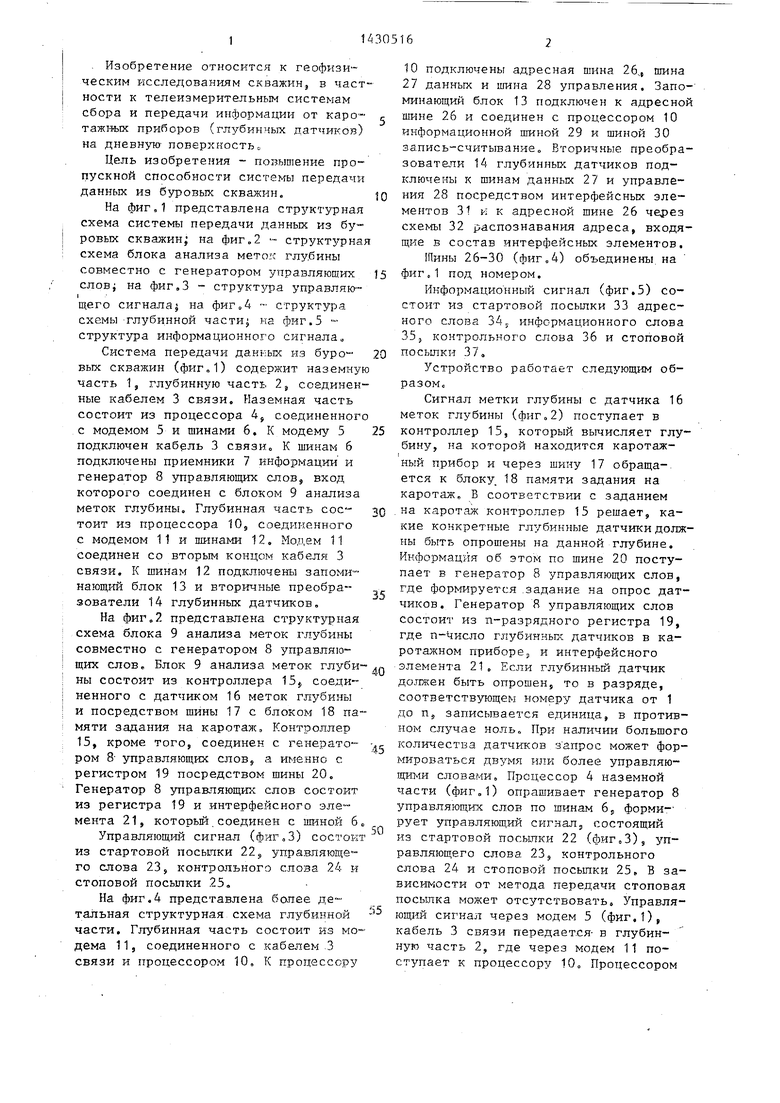
| название | год | авторы | номер документа |
|---|---|---|---|
| Система передачи данных для буровых скважин | 1978 |
|
SU1087082A3 |
| Комплексно-комбинированный прибор для каротажа скважин | 1983 |
|
SU1087939A1 |
| Каротажная станция | 1988 |
|
SU1749867A1 |
| Многоканальный преобразователь угла поворота вала в код | 1983 |
|
SU1144190A1 |
| СПОСОБ РЕГИСТРАЦИИ ДАННЫХ РАДИОАКТИВНОГО КАРОТАЖА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2013 |
|
RU2530471C1 |
| Телеметрическая система для каротажа скважин | 1983 |
|
SU1122995A1 |
| Устройство для ввода информации | 1988 |
|
SU1716501A1 |
| Устройство для обмена информацией между абонентами | 1986 |
|
SU1383376A1 |
| Устройство для связи микропроцессора с внешними устройствами | 1986 |
|
SU1372330A1 |
| Устройство микропроцессорной связи | 1983 |
|
SU1124275A1 |

О
сриг.2
22
23
A.
6
n
26
9&i/p.J
hw
| Способ передачи информации от скважинной к наземной части геофизической аппаратуры | 1983 |
|
SU1134708A1 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Система передачи данных для буровых скважин | 1978 |
|
SU1087082A3 |
| Выбрасывающий ячеистый аппарат для рядовых сеялок | 1922 |
|
SU21A1 |
| Шеститрубный элемент пароперегревателя в жаровых трубках | 1918 |
|
SU1977A1 |
