/ W
11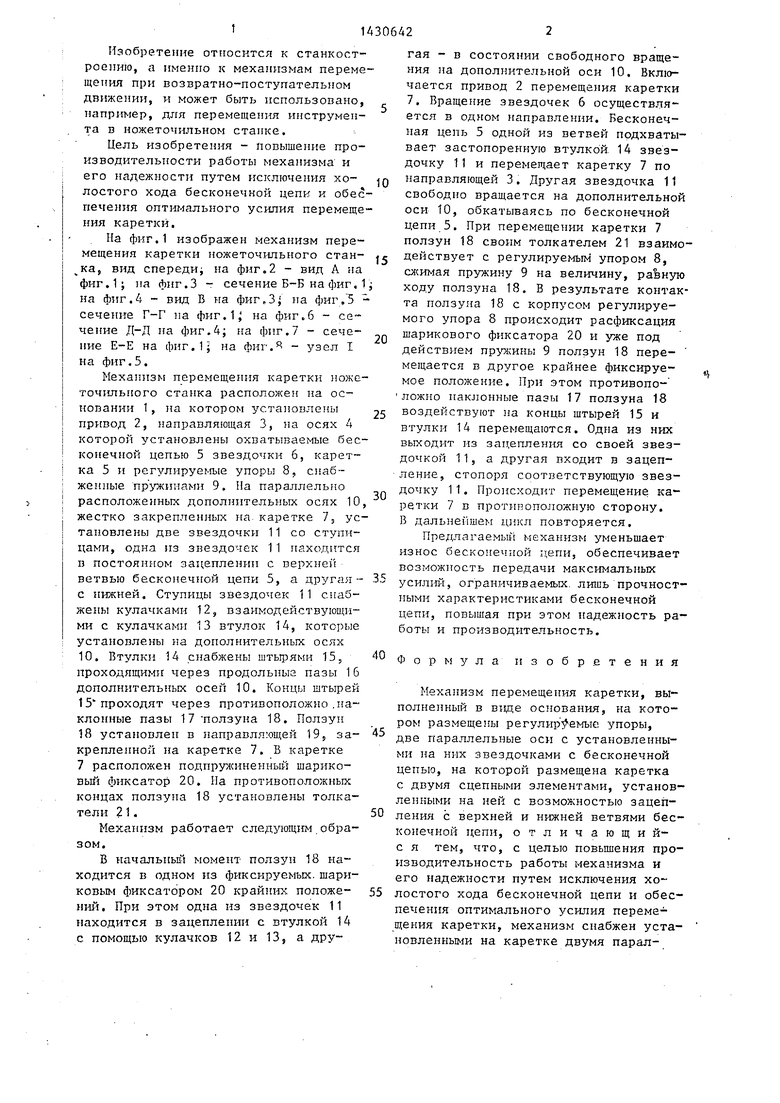
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для перемещения распылителя | 1983 |
|
SU1072917A1 |
| АППАРАТ ДЛЯ УЧЕТА ВРЕМЕНИ | 1972 |
|
SU335708A1 |
| ПРИВОД КАРЕТКИ ПЛОСКОВЯЗАЛЬНОЙ МАШИНЫ | 2002 |
|
RU2198252C1 |
| Многопозиционная машина для бесшвейного скрепления книжных блоков | 1989 |
|
SU1671474A1 |
| Автоматическая линия для сварки кольцевых швов | 1990 |
|
SU1766638A1 |
| Устройство для кантования изделий | 1985 |
|
SU1265120A1 |
| Стенд для сборки цепи, преимущественно тяговой вильчатой | 1983 |
|
SU1097476A1 |
| Устройство для шлифования деталей круглого сечения из древесины | 1982 |
|
SU1054027A2 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ КОНДИТЕРСКИХ ПЛАСТОВ | 1994 |
|
RU2101957C1 |
| КРУГЛОПИЛЬНЫЙ ДЕРЕВООБРАБАТЫВАЮЩИЙ СТАНОК | 1994 |
|
RU2078683C1 |

Е Sy
/ / / V ,
Ъ21I 17Гв
ffj// fi
cpuS. 5
/
LU.
cura
ffj// fi
cpuS. 5
Изобретение отпоснтся к станкостроению, а именно к механизмам перемещения при возвратно-поступательном движении, и может быть использовано, например, для перемещения инструмента в ножеточильном станке.
Цель изобретения - повышение производительности работы механизма и его надежности путем исключения хо- лостого хода бесконечной цепк и обеспечения оптимального усилия перемещения каретки.
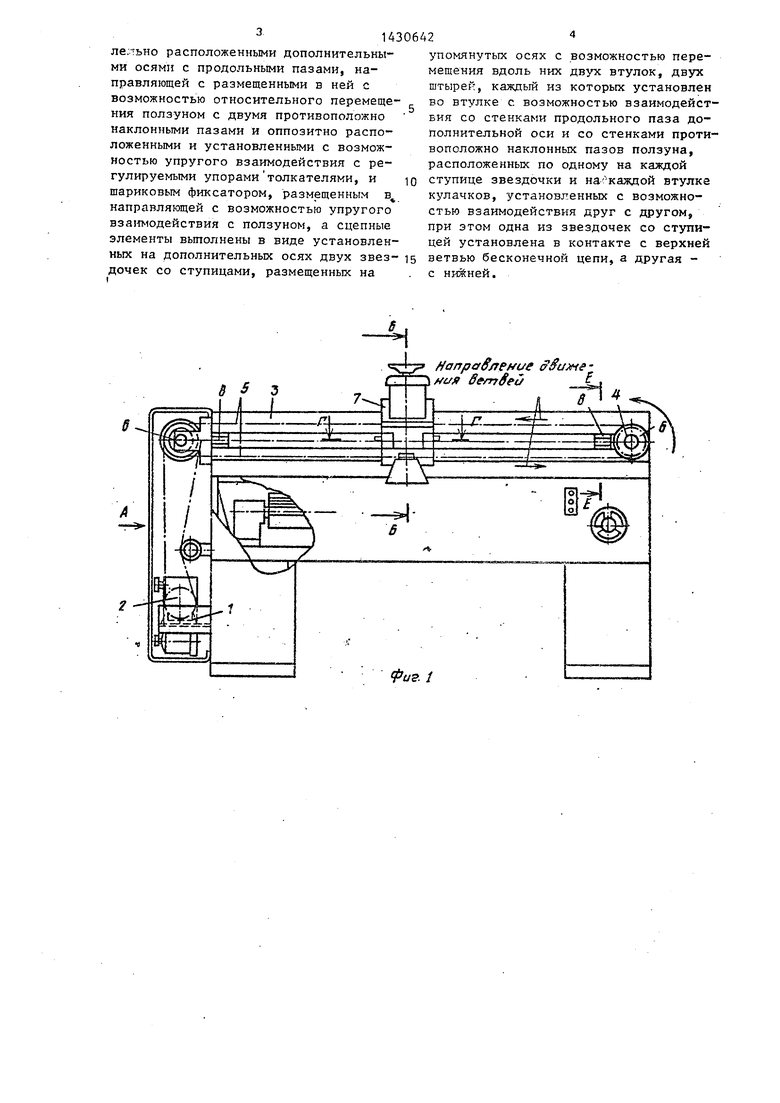
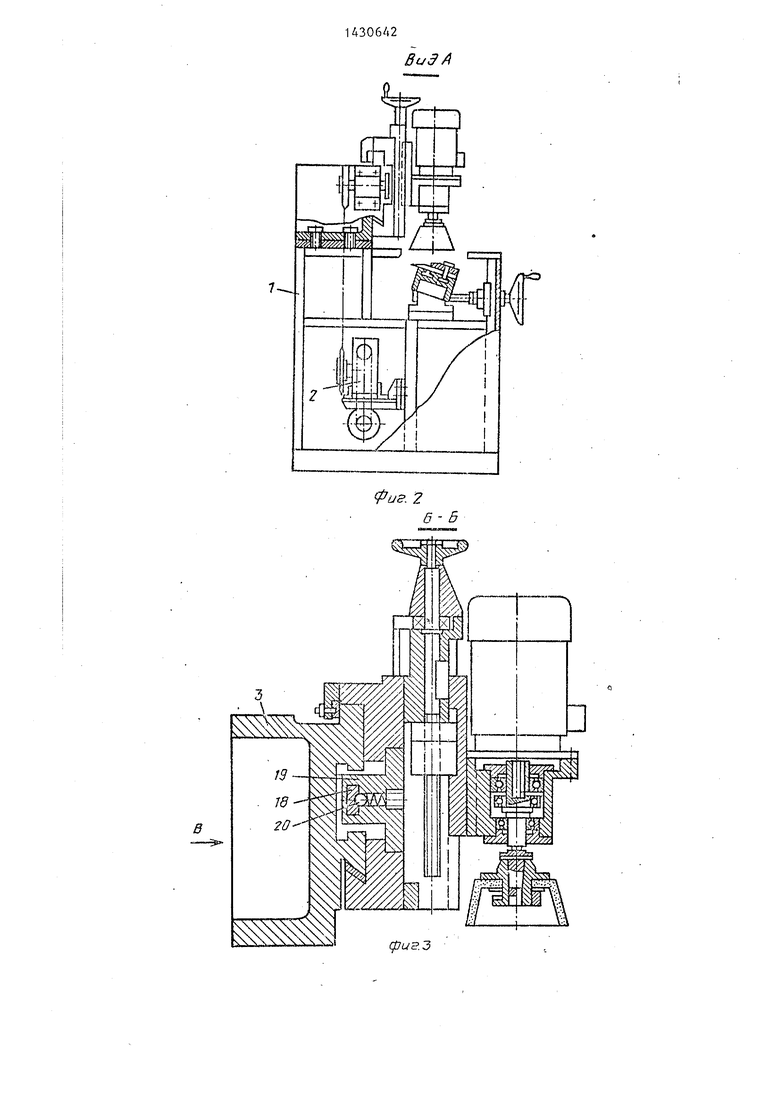
На фиг.1 изображен механизм перемещения каретки ножеточильного стан- ка, вид спереди на фиг.2 - вид А на фиг.1; на фиг.З - сечение Б-Б на фиг. Г на фиг.4 - вид В на фиг.З на фиг.З - сечение на фиг.1 на фиг.б - сечение Д-Д на фиг.4; на фиг.7 - сечение Е-Е на фиг.1 на фиг. - узел I на фиг.5.
Механизм перемещения каретки ножеточильного станка расположен на основании 1, на котором установлены привод 2, направляющая 3, на осях 4 которой установлены охватываемые бес- конечггой цепью 5 звездочки б, каретка 5 и регулируемые упоры 8,, снабженные пр ужинами 9. На параллельно расположенных дополнительных осях 10 жестко закрепленных ica каретке 7, установлены две звездочки 11 со ступицами, одна из звездочек 11 находится в постоянном зацеплении с верхней ветвью бесконечной цепи 5, а другая- с нижней. Ступицы звездочек 11 снабжены кулачками 12, взаимодействующими с кулачками 13 втулок 14, которые установлены на дополнительных осях 10, Втулки 14 снабжены штырями 15, проходящими через продольные пазы 16 дополнительных осей 10. Концы штырей 15 проходят через противоположно.наклонные пазы 17 -ползуна 18. Ползун 18 установлен в направляющей 19j за- крепленной на каретке 7. В каретке 7 расположен подпру синенньй щарико- вый фиксатор 20. На противоположных концах ползуна 18 установлены толкатели 21.
Механизм работает следующим.образом.
В начальный момент ползун 18 находится в одном из фиксируемых, шариковым фиксатором 20 крайних положе- НИИ. При этом одна из звездочек 11 находится в зацеплении с втулкой 14 с помощью кулачков 12 и 13, а дру
0
Q
r
5 5 5 0
0
0
гая - в состоянии свободного вращения на дополнительной оси 10. чается привод 2 перемещения каретки 7. Вращение звездочек 6 осуществляется в одном направлении. Бесконечная цепь 5 одной из ветвей подхватывает застопоренную втулкой 14 звездочку 11 и перемещает каретку 7 по направляющей 3. Другая звездочка 11 свободно вращается на дополнительной оси 10, обкатываясь по бесконечной цепи 5. При перемещении каретки 7 ползун 18 своим толкателем 21 взаимодействует с регулируемым упором 8, сясимая пружину 9 на величину, равную ходу ползуна 18. В результате контакта ползуна 18 с корпусом регулируемого упора 8 происходит расфиксация шарикового фиксатора 20 и уже под действием пр:,о1сины 9 ползун 18 пере- мещается в другое крайнее фиксируемое положение. При этом противопо- ложно наклонные пазы 17 ползуна 18 воздействуют иа концы штырей 15 и втулки 14 перемещаются. Одна из них выходит из зацепления со своей звездочкой 11, а другая входит в зацепление, стопоря соответствующую звездочку 11. Происходит перемещение каретки 7 в противоположную сторону. В дальнейшем цикл повторяется.
Предлагаемый механизм уменьшает износ бесконечной цепи, обеспечивает возможность передачи максимальных усилий, ограничиваемых, лишь прочностными характеристиками бесконечной цепи, повышая при этом надежность работы и производительность.
Формула изобретения
Механизм перемещения каретки, выполненный в виде основания, на котором размещены регулир:5 емыс упоры, две параллельные оси с установленными на них звездочками с бесконечной цепью, на которой размещена каретка с двумя сцепными злементами, установленными на ней с возможностью зацепления с верхней и нижней ветвями бесконечной цепи, отличающий- с я тем, что, с целью повьщ1ения производительность работы механизма и его надежности путем исключения холостого хода бесконечной цепи и обеспечения оптимального усилия перемещения каретки, механизм снабжен установленными на каретке двумя параллельно расположенньми дополнительными осями с продольными пазами, направляющей с размещенными в ней с возможностью относительного перемещения ползуном с двумя противоположно наклонными пазами и оппозитно расположенными и установленными с возможностью упругого взаимодействия с регулируемыми упорами толкателями, и шариковым фиксатором, размещенным в направляющей с возможностью упругого взатюдействия с ползуном, а сцепные элементы вьтолнены в виде установленных на дополнительных осях двух звез- 15 ветвью бесконечной цепи, а другая дочек со ступицами, размещенных на
упомянутых осях с возможностью перемещения вдоль них двух втулок, двух штырей, каждый из которых установлен во втулке с возможностью взаимодействия со стенками продольного паза дополнительной оси и со стенками противоположно наклонных пазов ползуна, расположенных по одному на каждой ступице звездочки и на- каждой втулка кулачков, установленных с возможностью взаимодействия друг с другом, при этом одна из звездочек со ступицей установлена в контакте с верхней
с нижней.
Напра /тениеffc/ff BffTjSea-™
Т
pus. i
ВиЗА
(иг. 2
(pL/г.З
Д-А
fUB6
Составитель Т.Петухова Редактор АоЛежнинаТехред Л.Сердюкова. Корректор М,Максим1шинец
Заказ 5321/35
Тираж 784
ВНИИПИ Государственного комитетй СССР
по делам изобретений и открытий 113035, Москва, Ж-35, Раушская наб., д. 4/5
-
15
фи.7
(рие.8
Подписное
| Лртоболевстскй И,И | |||
| Механизмы в современной техни;с | |||
| М.: Наука, 1981, i .5, с,370. |
