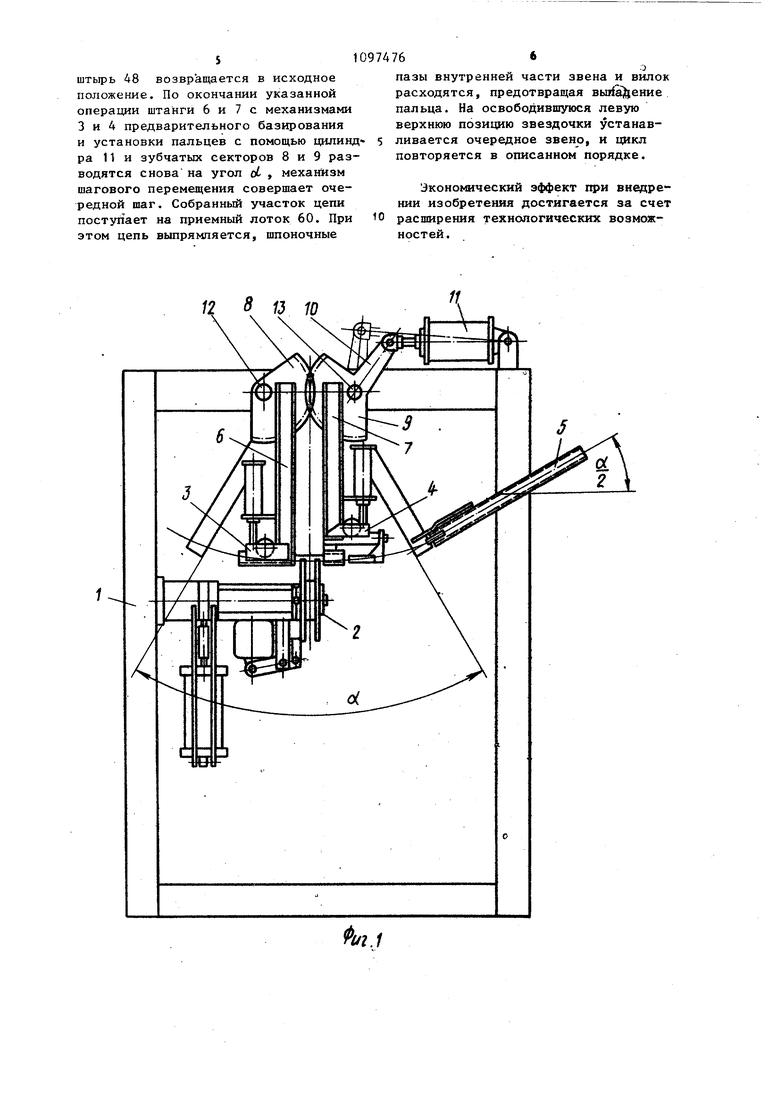
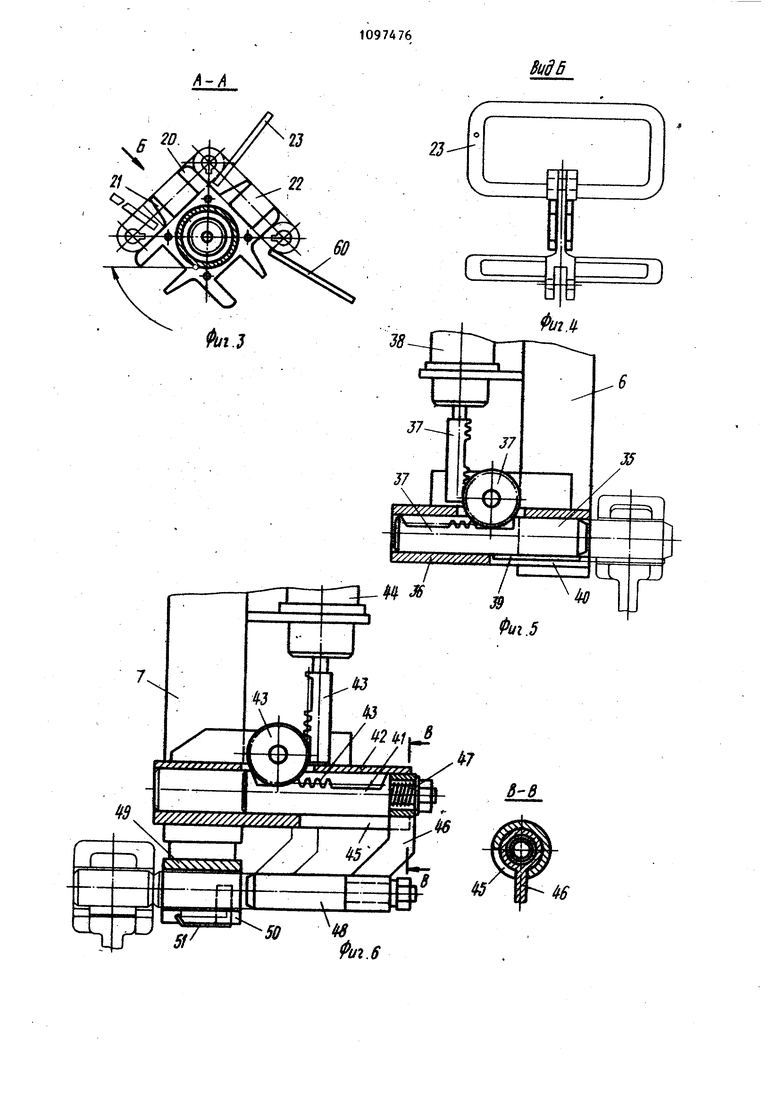
1 Изобретение относится к машиностроению, а именно к конструкциям сборочных машин. Известен стенд для сборки цепи, содержащий основание, механизм шагового перемещения с приводной звез дочкой, механизм установки пальцев цепи, магазин для подачи пальцев и механизм предварительного базирован звеньев. Сборка цепи в нем осущест вляется соединением звеньев цепи пр помощи пальцев 1 . Недостаток известного устройства ограниченные технологические возмож ности, так как нельзя собирать тяго вые вильчатые цепи с разъемом звень под прямым углом с прикрепленными к ним скребками. Цель изобретения - расширение те нологических возможностей за счет обеспечения сборки тяговой -вильчато цепи с разъемом звеньев под прямым углом и прикрепленными к ним скребками. Указанная цель достигается тем, что стенд для сборки цепи, преимущественно тяговой вильчатой, содержащий основание, механизм шагового перемещения с приводной звездочкой, а еханизм установки пальцев, магазин для подачи пальцев и механизм предв рительного базирования звеньев, сна жен устройством для поворота механизмов предварительного базирования звеньев и установки пальцев, выполненным в виде смонтированных на ося и связанных между собой зацеплением двух зубчатых секторов с закрепленными на них штангами и шарнирно сое диненного с одним из секторов пневм тического цилиндра, при этом оси зубчатых секторов и пневматический цилиндр смонтированы на основании, упомянутые механизмы предварительного базирования звеньев и установк пальцев закреплены на штангах, а ма газин для подачи пальцев размещен на основании танген1щально траектории поворота механизма установки пальцев. Кроме того, механизм предварительного базирования звеньев выполнен в виде ползуна и соединенного ё ним посредством зубчато-реечной передачи силового цилиндра. Механизм установки пальцев выполнен в виде ползуна и соединенног с ним посредством зубчато-реечной передачи силового цилиндра и прием62ника с толкателем, смонтированным на этом ползуне с возможностью поворота. На фиг. 1 показан стенд, общий вид; на фиг. 2 - механизм шагового , перемещений цепи; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - вид Б на фиг. 3; на фиг. 5 - механизм предварительного базирования; на фиг. 6 - механизм установки пальцев; на фиг.7 - магазин подачи пальцев; на фиг. 8 - вид Г на фиг. 7; на фиг. 9 - разрез Д-Д на фиг. 7. Стенд содержит основание 1, механизм шагового перемещения 2, механизм 3 предварительного базирования звеньев, механизм 4 установки пальдев и магазин 5 подачи пальцев. Механиз1Ф1 предварительного базирования и установки пальцев установлены на вертикальных штангах 6 и 7, закрепленных на зубчатых секторах 8 и 9.. Сектор 9 через рычаг 10 соединен с штоком силового цилиндра 11. Зубчатые секторы смонтированы с возможностью поворота на осях 12 и 13, закрепленных на основании 1. Механизм шагового перемещения цепи содержит вал 14 с зубчатым колесом 15, взаимодействукидим с зубчатой рейкой 16 силового цилиндра 17. На другом конце вала с возможностью вращения смонтирована звездочка, состоящая из двух пластин 18 и 19, имекшщх выступы 20 и 21 для фиксации звеньев цепи 22 с прикрепленными на них скребками 23. Пластины поджимаются друг к другу через прокладку 24 крыппсой 25, при этом штыри 26 предотвращают их взаимное смещение по окружности. Поворот звез дочки относительно вала 13 ограничен пружинно-шариковыми фиксаторами 27 через каждые 90 Вал установлен в подшипниках 28, расположенных в корпусе 29. На корпусе установлен электромагнит 30, ярмо которого через коромысло 31, смонтированное на стойке 32, соединено с подпружиненньв4 фиксатором 33, взаимодействующим с четырьмя гнездаьб1 34 на ступице звездочки, расположенными по окружности ступицы под углом 90. Механизм предварительного базирования содержит ползун 35, расположенный в обойме 36, зубчато-реечную передачу 37 и силовой цилиндр 38. Ползун имеет в нижней части призматический выстуй 39, размеры которого соответствуют поперечному сечению выступающей части шпонки пальца цепи. Выступ имеет возможность перемещения в пазу 40 обоймы 36. Обойма 36 ползуна и силовой цилиндр установлены на штанге 6. Механизм установки пальцев содержит ползун 41, размещенный в корпусе 42, зубчато-реечную передачу 43 и силовой цилиндр 44. В нижней части корпуса 42 имеет секторный вырез 45, в котором при движении ползуна перемещается толкатель 46, смон тированный с возможностью поворота на ползуне 41. Пружиной кручения 47 толкатель 46 поджимается к вертикальном торцовой поверхности выреза На толкателе 46 закреплен штырь 48, а на одной оси с ним установлен приемник пальцев 49, имеющий внизу сквозной паз 50 по размерам шпонки пальца. В паз входит конец пластинчатой пружцны 51, закрепленной на наружной поверхности приемника. Силовой цилиндр, корпус штока и приемник неподвижно установлены на штанге 7. Магазин для подачи пальцев содер жит трубу 52 с продольньш пазом 53 вырезанным по размерам шпонки пальца копир 54, неподвижно закрепленный на трубе, и отсекатель в виде двуплечего рычага 55 с зубом 56, шарнирно закрепленного на оси 57 и прижимаемого к трубе, пружиной 58. На другом плече рычага установлен регулируемый винт 59, входящий в отверстие на трубе. Зуб рычага через вырез в торце трубы входит в ее внутреннюю полость, удерживая от скольжения находящийся в ней ряд пальцев. Собранные участки цепи поступают на приемный лотоК 60. Стенд работает следующим образом Звено цепи 22 с закрепленным на нем скребком 23 устанавливается межд выступами 20 и 21 пластин 18 и 19 в левой верхней четверти звездочки вилкой вниз, после чего включается электромагнит 30 и одновременно подается давление в верхнюю полость силового цилиндра 17. При этом фиксатор 33 выходит из гнезда 34, а зуб чатая рейка 16 опускается, поворачивая вал 14 со звездочкой на 90 Затем электромагнит отключается, од- новременно тдается давление в нижнюю полость цилиндра, и вал вращается в прот14воположную сторону. При ЭТОМ звездочка остается неподвижной, так как фиксатор 33 вошел в следующее гнездо 34, а вращение вала относительно неподвижной звездочки обеспечивается за счет пружинно-шариковых фиксаторов 27. Таким образом, звено цепи перемещается в правую верхнюю четверть механизма, а на очередную позицию укладывается следующее звено. При этом соединительный конец звена оказывается в вилке предыдущего, а выступы 20 и 21 звездочки обеспечивают предварительное совмещение отверстий и шпоночных пазов обоих звеньев. Все описанные операции производятся при разведенных на угол cL штангах 6 и 7 с расположенными на них механизмами предварительного базирования и установки пальцев, что обеспечивает необходимую свободную зону для беспрепятственного прохода скребка цепи при повороте звездочки механизма шагового перемещения цепи. В разведенном положении штанг копир 54 магазина для пальцев воздействует на толкатель 46 механизма установки пальцев и, преодолевая сопротивление пружины 47, отклоняет его в сторону, а приемник 49 совмещается с трубой 52 магазина. При этом правый торец приемника, преодолевая сопротивление пружины 58, отклоняет рычаг 55 магазина и очередной палец цепи поступает в приемник, причем шпонка пальца входит в паз 50. Пружина 51 приёмника, упираясь в шпонку пальца, удерживает его от выпадения. Последний ряд пальцев в магазине удерживается при этом винтом 59. Затем подается давление в полость цилиндра 11 и штанги 6 и 7 с механизмами 4 и 3 предварительного базирования звеньев и установки пальцев занимают рабочее положение. ВключеHijeM цилиндра 38 через зубчато-реечную передачу 37 механизма предварительного базирования ползун 35 вьщвигается и входит в отверстия и шпоночные пазы установленных на механизме шагового перемещения звеньев цепи, обеспечивая точное их сормеще-. ние. При этом палец цепи, находящийся в приемнике 49, зажимается между торцами ползуна 35 и штыря 48. Включением цилиндра 44 и выключением цилиндра 38 палец цепи из приемника 49 йа счет перепада давления в цилиндрах 38 и 44 вдвигается в отверстия звеньев цепи, после чего штьфь 48 возвращается в исходное положение. По окончании указанной операции штанги 6 и 7 с механизмами 3 и 4 предварительного базирования и установки пальцев с помощью цилинд ра 11 и зубчатых секторов 8 и 9 разводятся снова на угол oi , механизм щагового перемещения совершает очередной шаг. Собранный участок цепи поступает на приемный лоток 60. При этом цепь выпрямляется, шпоночные 66 пазы внутренней части звена и вилок расходятся, предотвращая вы1{а |)|ение пальца. На освободившуюся левую верхнюю позицию звездочки устанавливается очередное звено, и цикл повторяется в описанием порядке. Экономический эффект при виедре нии изобретения достигается за счет расширения технологических возможностей.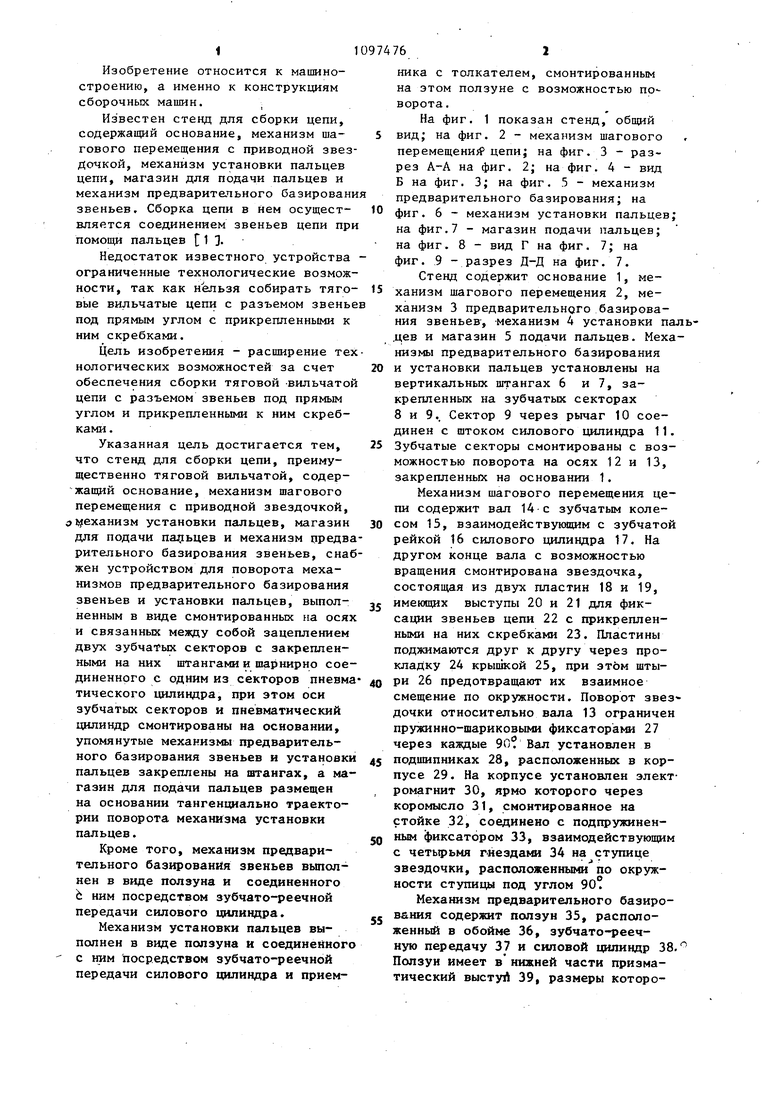

| название | год | авторы | номер документа |
|---|---|---|---|
| Магазин-накопитель деталей | 1986 |
|
SU1366354A1 |
| Стенд для сборки гусеничной цепи | 1979 |
|
SU880682A1 |
| Автоматизированная линия для многопереходной штамповки | 1986 |
|
SU1344471A1 |
| Устройство для шаговой подачи цепи | 1989 |
|
SU1722770A1 |
| СТАНОК ДЛЯ СБОРКИ ГУСЕИИЧИОЙ ЦЕПИ | 1966 |
|
SU189670A1 |
| Устройство для транспортирования трубчатых изделий | 1982 |
|
SU1055710A1 |
| Перегрузочное устройство | 1986 |
|
SU1402522A1 |
| Устройство для обработки кулачков | 1970 |
|
SU478690A1 |
| Патрон для обработки наружных и внутренних цилиндрических поверхностей, смещенных относительно оси детали | 1978 |
|
SU686830A1 |
| АРТИЛЛЕРИЙСКАЯ КОРАБЕЛЬНАЯ УСТАНОВКА | 2012 |
|
RU2533947C2 |

1. СТЕНД ДЛЯ СБОРКИ ЦЕПИ, ПРЕИМУЩЕСТВЕННО ТЯГОЮЙ ВИЛЬЧАТОЙ, содержащий основание, механизм шагового перемещения с приводной звеэ- дочкой, механизм установки пальцев, магазин для подачи пальцев и механизм предварительного базирования звеньев, отличающийся тем, что, с.целью расширения технологических возможностей за счет обеспечения сборки цепи с.разъемом звеньев под прямым углом и прикрепленны1 ш к ним скребками, он снабжен устройством для поворота механизмов предварительного базирования звеньев и установки пальцев, выполненным в виде смонтированных на осях и связанных между собой зацеплением двух зубчатых секторов с закрепленными на них штангами и шарнирно соединенного с одним из секторов пневматического щшиндра, при этом оси зуб чатых секторов и пневматический цилиндр смонтированы на основании, упомянутые механизмы предварительного базирования звеньев и установки пальцев закреплены на нггангах, a магазин для подачи пальцев размещен на основании тангенщ ально траектории поворота механизма установки пальцев. 2.Стенд по п. 1, отличающийся тем, что механизм пред§ варительного базирования звеньев выполнен в виде ползуна и соединенного с ним посредством зубчато-реечной передачи силового цилиндра. 3.Стенд по, п. 1, отличаю§ щий с я тем, что механизм установки пальцев выполнен в виде ползуна, соединенного с ним посредСО ством зубчато-реечной передачи си лового цилиндра и приемника с толка-. 4;: телем, смонтированньш на этом ползуне с возможностью поворота. о:)
12 8 /J 10
П
/4-/4
BvdB
23D
u
ФтЛ
.6
5lf.
ь
Фиг.В Д-Д
58 55 7 «
Фиг.9
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Стенд для сборки гусеничной цепи | 1979 |
|
SU880682A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
