4
со
00
ю
Изобретение относится к управлению технологическими процессами и может быть использовано при автоматизированном управлении флотационными процессами обогатительных фабрик.
Цель изобретения - повышение точности управления при дробной подаче реагентов.
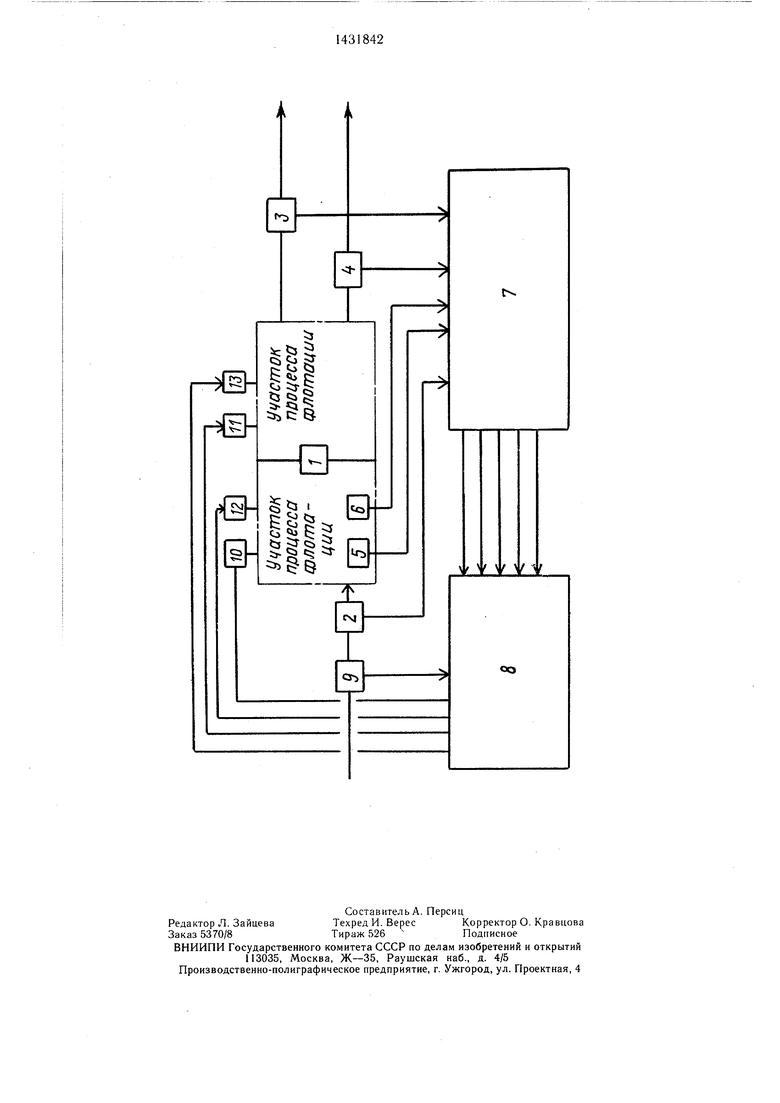
На чертеже приведена блок-схема устройства управления.
Способ заключается в том, что интервалы дискретности управления формируют по времени запаздывания по участкам и всему процессу флотации, измеряют объемные расходы исходного питания флотации в интервалах дискретности управления по участкам и всему процессу флотации и дополнительно изменяют расход реагента на каждом участке и по всему процессу флотации пропорционально измеренным объемным расходам исходного питания флотации.
На входе флотомашины 1 установлены пробоотбирающие устройства 2 исходного питания, на выходе флотомашины 1 - пробоотбирающие устройства конечных концентратов 3 и хвостов 4, на выходе первого участка процесса флотации - пробоотбираю- ш,ие устройства 5 и 6 соответственно промежуточных концентрата и хвостов. Все пробоотбирающие устройства подают пробы в анализатор 7, информация из которого поступает в вычислительное устройство 8. В вычислительное устройство 8 поступает также информация от датчика 9 объемного расхода питания флотации. Выходной сигнал вычислительного устройства 8 изменяет управляющие параметры на обоих участках процесса флотации - расходы реагентов 10 и 11 и уровни пульпы 12 и 13.
Способ осуществляется следующим образом.
С помощью анализатора 7 контролируют содержание полезных компонентов в исходном литании устройством 2, через промежуток времени, равный времени запаздывания на участке процесса флотации, измеряют содержание полезного компонента в промежуточных концентрате устройством 5 и хвостах устройством 6 и через промежуток времени, равный времени запаздывания на всем процессе флотации, измеряют содержание полезного компонента в конечных концентрате устройством 3 и хвостах устройством 4. С помощью вычислительного устройства 8 оценивают условия флотации на участке процесса флотации, рассчитывая значение кинетической константы для этого участка, по измеренным значениям содержания полезного компонента в исходном питании в промежуточных концентрате и хвостах и текун ему усредненному значению объемного расхода питания флотации. В зависимости от разности между заданными и полученным
5
0
5
0
5
0
значениями кинетической константы для участка процесса флотации вычислительным устройством 8 формируют корректирующее воздействие на изменение расхода реагентов 10 и уровня пульпы 12 на участке процесса флотации. Затем с помощью вычислительного устройства 8 оценивают условия флотации на другом участке процесса флотации, рассчитывая значение кинетической константы для этого участка, по измеренным значениям содержания полезного компонента в промежуточных хвостах и в конечных концентрате и хвостах и текущему усредненному значению объемного расхода питания флотации. В зависимости от разности между заданным и полученным значениями кинетической константы для другого участка процесса флотации вычислительным устройством 8 формируют корректирующее воздействие на изменение расхода реагентов И и уровня пульпы 13 на другом участке процесса флотации.
Число участков процесса флотации, на которых управляют условиями флотации, может быть более двух и должно соответствовать числу точек дробной подачи реагентов.
Время пребывания частиц во флотомащи- не t и время запаздывания Т определяются как объемным расходом питания флотации, так и структурой потоков пульпы во флото- мащине. Поэтому для определения t и t необходимо по экспериментальным данным охарактеризовать структуру потоков. С этой целью на выбранном участке процесса флотации при постоянном значении объемного расхода питания флотации Fg определяют время пребывания частиц во флотомашине to и по максимуму взаимно-корреляционной функции содержаний полезного компонента в питании и хвостах на выбранном участке процесса флотации определяют время запаздывания to При этом выполняются следующие равенства:
5
0
to
tr- Vi
т. - .
где - константы, характеризующие структуру потоков во флотомашине.
Для определения времени пребывания частиц во флотомашине t и времени запаздывания г можно воспользоваться следующими уравнениями:
Уо .с-
-
я; -55
где F- объемный расход питания флотомащины.
Кинетическая константа К определяется по формуле
K fln,
где 6 - извлечение полезного компонента в концентрате на выбранном участке процесса флотации.
6 согласно уравнений материального баланса вычисляется по формуле
с .
(Jit-l)
где,о.- содержание полезного компонента
в исходном питании;
- содержание полезного компонента соответственно в концентрате и хвостах, измеренные с запаздыва- ванием С после измерения Изменение расхода реагентов может определяться, исходя из следующей зависимости кинетической константы К от удельного расхода реагентов С:
К(С)Р-1-е с
где р; „; , - константы, идентифицируемые по экспериментальным данным.
Пример. Идентификация параметров V, и V, для восьмикамерных флотомашин была произведена по данным промышленного эксперимента, в ходе которого в течение 2 ч набиралась статистика содержания сильвина в питании и хвостах при постоянных уровне пульпы во флотомашине, плотности и расходе питания флотации, равном 5 и постоянном расходе реагентов. В качестве индикатора использован радиоактивный элемент К, содержащийся в небольших количествах в калийной руде. Проведенные расчеты показали, что Vo 28 м, Vi 15 м. Если F 4,5 , то t 6,2 мин, г 3,3 мин. Пусть измеренное содержание сильвина в питании флотации 28%, а измеренное через 3,3 мин содержание сильвина в концентрате и хвостах соответственно 79% и 4%, когда 0,9 К--0,37 1/мин.
Примером идентификации параметров Р; €о ; , служит эксперимент по флотации угольных шламов крупностью -1,0+0,5 мм, где получена следующая зависимость кинетической константы от расхода трансфбрма- горного масла:
K(C)0,172exp(-lf2-|f-). ,
Разлагая функцию К (С) в ряд Тейлора в точке С , соответствующей регламентируемому значению расхода реагентов, получают
К(С)0,172ехр(- -ff™)
+ О 172 ехр(- .
+ и,( 47,52+00-(47,52+00)
X (С-Со).
Первое слагаемое равно задаваемому значению кинетической константы К , перенося его в левую часть уравнения, получают следующую формулу для расчета величины, на которую необходимо изменить расход реа- гента для стабилизации значения кинетической константы:
(С-Со) (К-Ко) : о, 1 72 ехр (-
X
(47,52-00)
Предлагаемое изобретение позволяет повысить точность управления и за счет обеспечения контроля времени пребывания частиц руды во флотомащине снизить расход реагентов примерно на 3% при неизменном извлечении полезного компонента в концентрат. Оперативность коррекции управляющих воздействий увеличивается вдвое.
30
Формула изобретения
Способ управления процессом флотации, основанный на изменении расхода реагентов по содержанию полезных компонентов в исходном питании, промежуточных, конечных
концентратах и хвостах в выделенных интервалах дискретности управления, отличающийся тем, что, с целью повышения точноси управления при дробной подаче реагентов, интервалы дискретности управления
формируют по времени запаздывания по участкам и всему процессу флотации, измеряют объемные расходы исходного питания флотации в интервалах дискретности управения по участкам и всему процессу флотации и дополнительно изменяют расход реагентов на каждом участке и по всему процессу флотации пропорционально измеренным объемным расходам исходного питания флотации.
f f f
00
| название | год | авторы | номер документа |
|---|---|---|---|
| Способ управления процессом флотации | 1987 |
|
SU1685528A1 |
| СПОСОБ ПОЛУЧЕНИЯ ХЛОРИСТОГО КАЛИЯ ИЗ СИЛЬВИНИТОВОЙ РУДЫ | 2007 |
|
RU2366607C2 |
| Устройство управления процессом флотации | 1980 |
|
SU900862A1 |
| Способ автоматического управления процессом флотации | 1986 |
|
SU1313513A1 |
| Способ управления процессами измель-чЕНия и флОТАции | 1979 |
|
SU822900A1 |
| СПОСОБ УПРАВЛЕНИЯ ТЕХНОЛОГИЧЕСКИМ ПРОЦЕССОМ ФЛОТАЦИИ | 2015 |
|
RU2596841C2 |
| Способ управления процессом флотации | 1986 |
|
SU1389854A1 |
| СПОСОБ ПОЛУЧЕНИЯ ХЛОРИСТОГО КАЛИЯ ИЗ СИЛЬВИНИТОВЫХ РУД | 1991 |
|
RU2019536C1 |
| СПОСОБ АВТОМАТИЧЕСКОГО КОНТРОЛЯ И УПРАВЛЕНИЯ ПРОЦЕССОМ КОМПЛЕКСНОГО ОБОГАЩЕНИЯ ЗОЛОТОСОДЕРЖАЩИХ РУД | 2017 |
|
RU2680624C1 |
| СПОСОБ ОБОГАЩЕНИЯ ВЫСОКОШЛАМИСТЫХ КАЛИЙСОДЕРЖАЩИХ РУД | 2011 |
|
RU2467803C2 |
Изобретение относится к управлению нроцессами обогащения нолезных исконае- мых. Цель изобретения - повышение точности управления при дробной подаче реагентов. Для этого расход реагентов изменяют по содержанию полезных компонентов в исходном питании, промежуточных, конечных концентратах и хвостах в выделенных интервалах дискретности. Интервалы дискретности формируют по времени запаздывания по участкам и всему процессу флотации. Далее измеряют объемные расходы исходного питания и дополнительно изменяют расход реагентов на каждом участке и по всему процессу флотации пропорционально измеренным объе.мным расходам исходного питания флотации. По измеренным параметрам рассчитывают значения кинетической константы по участкам и по всему процессу. Эти величины характеризуют условия флотации. Чнс- ло участков процесса флотации, на которых управляют условиями флотации, может быть более двух и должно соответствовать числу точек дробной подачи реагентов. 1 ил. i (Л
| Способ управления процессом флотации | 1978 |
|
SU722584A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ управления процессом флотации | 1981 |
|
SU1005918A1 |
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
