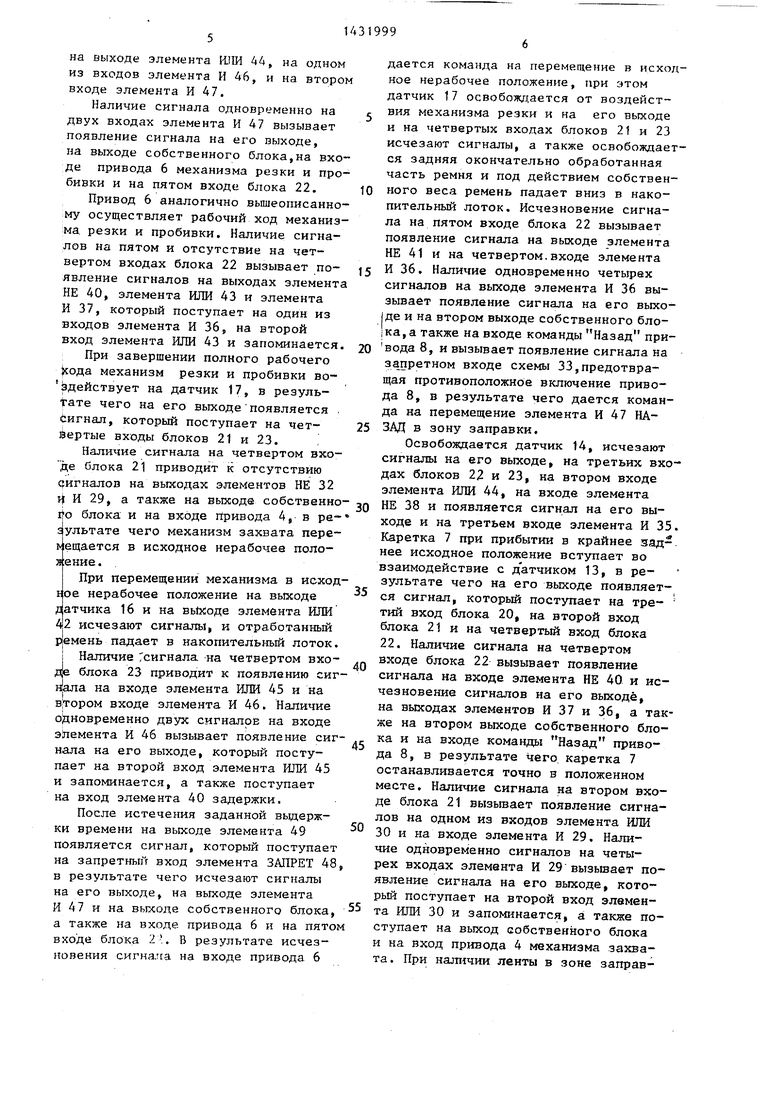
Назад. Функциональная схема блока управления включает пусковой блок 19, блок 20 автоматического останова исполнительньпс механизмов в исходном положении, блок 21 управления механизмом захвата материала, блок управ ления перемещением каретки, блок 23
управления механизмом резки и пробивки, привод механизма захвата, привод перемещения каретки Вперед и Назад, привод механизма резки и пробивки, сигнализатор 18 отсутствия материала на размоточном устройстве, 5 з.п.ф-лы, 2 ил.
| название | год | авторы | номер документа |
|---|---|---|---|
| Натяжное устройство для ленточного конвейера | 1982 |
|
SU1063732A1 |
| Автомат для укладки строительных изделий | 1991 |
|
SU1807935A3 |
| Устройство автоматического управления автоматом для укладки кирпича | 1988 |
|
SU1648779A1 |
| Устройство для вставки крышки в ботан чемодана | 1988 |
|
SU1562314A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ ТРАНСПОРТНЫМ ПОТОКОМ СЫРЬЕВЫХ КОМПОНЕНТОВ СТЕКОЛЬНОЙ ШИХТЫ | 1991 |
|
RU2026806C1 |
| Устройство управления автоматом для укладки кирпича | 1990 |
|
SU1726265A1 |
| ГОРИЗОНТАЛЬНО ЗАМКНУТЫЙ ТЕЛЕЖЕЧНЫЙ КОНВЕЙЕР | 1991 |
|
RU2013330C1 |
| Устройство для управления аккумуля-TOPOM пОлОСы | 1979 |
|
SU814499A1 |
| Устройство для управления переключением резерва | 1982 |
|
SU1037437A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМАТОМ ДЛЯ УКЛАДКИ КИРПИЧА | 1991 |
|
RU2028208C1 |
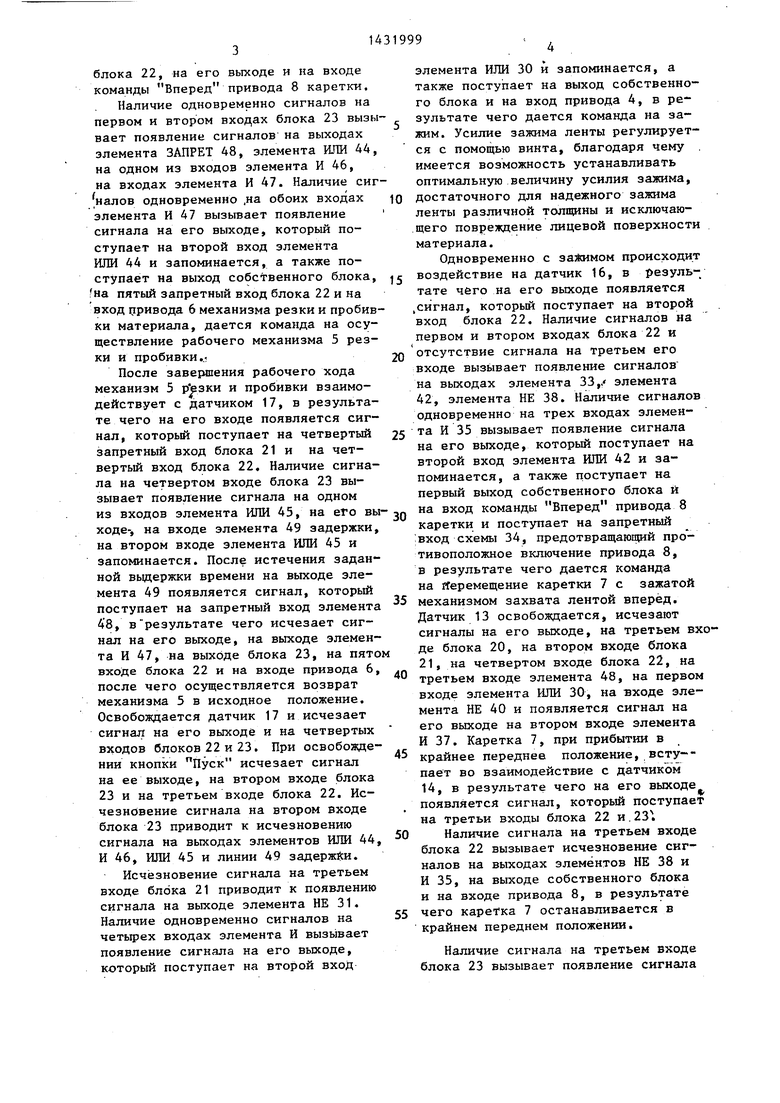
Изобретение позволяет повысить качество ремней из искусственной кожи или ткани. Устройство для изготовления ремней из ленты содержит станину, размоточное устройство, каретку с механизмом захвата материала, механизм резки и пробивки, датчик 15 отсутствия материала. Механизм резки и пробивки снабжен датчиком 17, а каретка - датчиками 13,14 ограничения хода соответственно Вперед и W (Л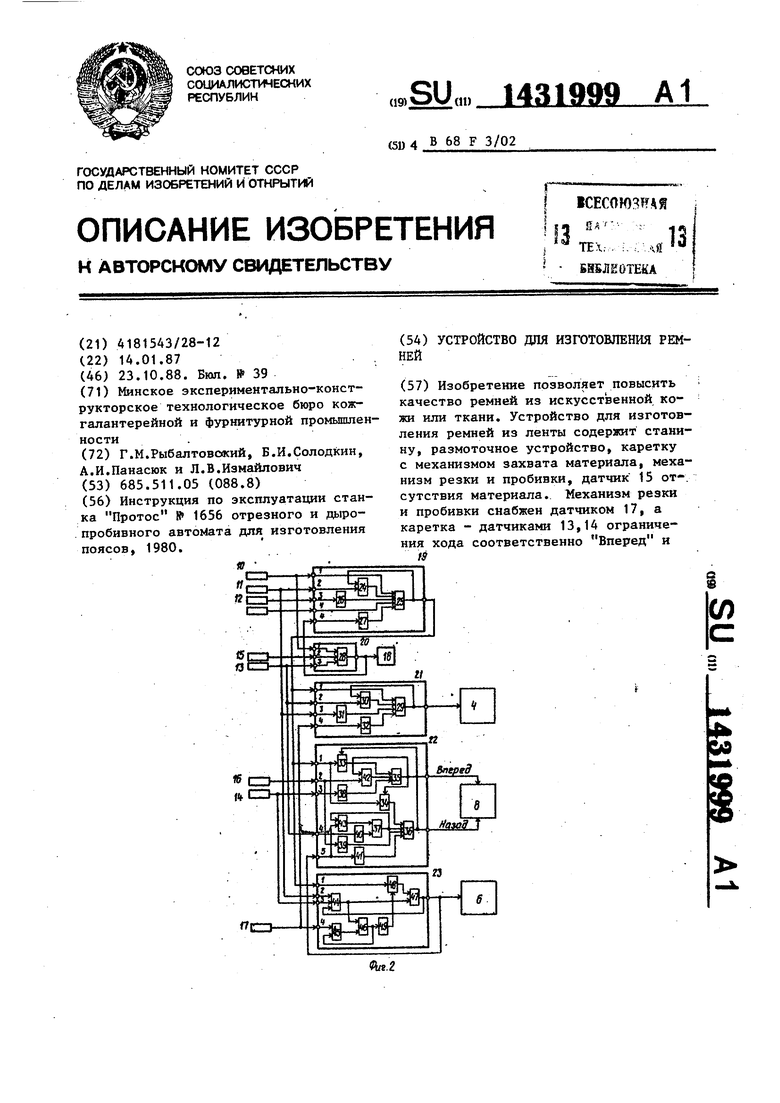
1
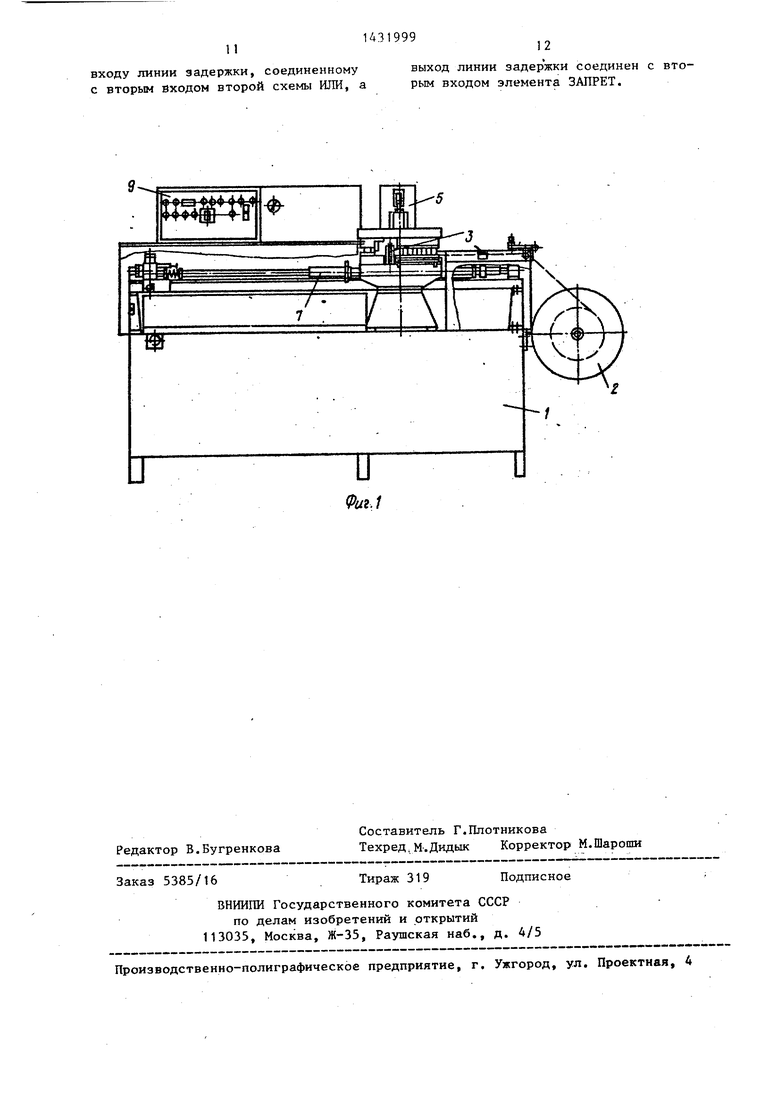
Изобретение относится к оборудованию для изготовления ремней, например, из искусственной коли, ткани и других материалов.
Целью изобретения является повышение качества производимых изделий.
На фиг. 1 изображено устройство, общий вид;-на фиг. 2 - функциональная схема блока управления.
Устройство для изготовления ремней из ленты содержит станину 1, размоточное устройство 2, механизм 3 захвата материала, привод 4, меканиз,м 5 резки и пробивки отверстий, привод 6, каретку 7 привод 8, блок 9 управления, кнопки включения 10, пуска 11, останова 12, первый 13 и второй
14датчики положения каретки, датчик
15наличия материала, датчик 16 зажима материала, датчик 17 хода механизма резки и пробивки, сигнализатор 18,
а блок, управления содержит блок 19 пуска,блок 20 останова,блок 21 управлеIния механизмом захвата, блок 22 уп- Правления перемещением каретки, блок j23 управления механизмом резки и про- |бивки.
: Блок 19 пуска содержит схемы ИЛИ 124 и И 25, инверторы (элементы НЕ) 26 и 27. Блок останова содержит схему И 28.
Блок управления механизмом захвата содержит схемы И 29 и ИЛИ 30, инверторы 31 и 32.
Блок управления перемещением каретки содержит схемы 33 и 34 Запрет первую 35, вторую 36, третью 37 схемы И, первый 38, второй 39, третий 40 и четвертый 41 инверторы, схемы ИЛИ 42 и 43..
Блок управления механизмом резки и пробивки содержит элементы ИЛИ 44 и
45, элементы И 46 и 47, элемент ЗАПРЕТ 48, линию 49 задержки.
Устройство работает следующим образом.
Рулон ленты устанавливается в размоточное устройство 3 Каретка 7 находится в исходном крайнем заднем положении.При этом на выходе первого датчика положени каретки присутствует сигнал.
Оператор включает вводный выключа- техйПО и воздействует на кнопку 11 Пуск.Сигнал с выхода вводного выклю- i чателя 10 поступает на первые входы блоков 19 и 20 и на первые входы элементов И 25 и 29t а сигнал с выхода кнопки 11 Пуск поступает на вторые входы блоков 19 и 23, на третий вход бло ка 21 и на входы элемента ИЛИ 24, элемента НЕ 31 и элемента ИЛИ 44.
Наличие сигнала на первом и вто ром входах блока 19 и отсутствие сигналов на третьем и четвертом входах этого же блока вызывает появление сигналов на выходах элемента ИЛИ 24 и элементов НЕ 26 и 27, а также на всех входах элемента И 25, в результате чего на его выходе появляется сигнал, который поступает на второй вход элемента ЕПИ 24 и запоминается, поступает на выход собственного блока и на первые входы блоков 21-23, а также на вход элемента И 29, на .разрешающие входы схемы 33 Запрет и элемента ЗАПРЕТ 48i Наличие сигнала на третьем входе блока 21 исключает появление сигнала на выходе элемента НЕ 31, на вьпсоде элемента И 29, на выходе собственного блока и на входе привода 4 механизма захвата.
Отсутствие сигнала на выходе датчика 16 зажима материала исключает появление сигнала на втором входе
блока 22, на его выходе и на входе команды Вперед привода 8 каретки.
Наличие одновременно сигналов на первом и втором входах блока 23 вызвает появление сигналов на выходах элемента ЗАПРЕТ 48, элемента ИЛИ 44 на одном иэ входов элемента И 46, на входах элемента И 47. Наличие си налов одновременно ,на обоих входах элемента И 47 вызьгеает появление сигнала на его выходе, который поступает на второй вход элемента ИЛИ 44 и запоминается, а также поступает на выход собственного блока : на пятый запретный вход блока 22 и на вход привода 6 механизма резки и пробивки материала, дается команда на осуществление рабочего механизма 5 резки и пробивки.,.
После завершения рабочего хода механизм 5 и пробивки взаимодействует с датчиком 17, в результате чего на его входе появляется сигнал, который поступает на четвертый запретный вход блока 21 и на четвертый вход блока 22. Наличие сигнала на четвертом входе блока 23 вызывает появление сигнала на одном из входов элемента ИПИ 45, на его выходе-, на входе элемента 49 задержки, на втором входе элемента ШШ 45 и запоминается. После истечения заданной выдержки времени на выходе элемента 49 появляется сигнал, который поступает на запретный вход элемента 48, в результате чего исчезает сигнал на его выходе, на выходе элемента И 47, на выходе блока 23, на пято входе блока 22 и на входе привода 6, после чего осуществляется возврат механизма 5 в исходное положение. Освобождается датчик 17 и исчезает сигнал на его выходе и на четвертых входов блоков 22 и 23. При освобожде НИИ кнопки Пуск исчезает сигнал на ее выходе, на втором входе блока 23 и на третьем входе блока 22. Исчезновение сигнала на втором входе блока 23 приводит к исчезновению сигнала на выходах элементов ИЛИ 44, И 46, ШШ 45 и линии 49 задержйи.
Исчезновение сигнала на третьем входе блока 21 приводит к появлению сигнала на выходе элемента НЕ 31. Наличие одновременно сигналов на четьфех входах элемента И вызывает появление сигнала на его выходе, который поступает на второй вход
0
5
5
0
5
0
5
0
элемента ИЛИ 30 и запоминается, а также поступает на выход собственно- го блока и на вход привода 4, в результате чего дается команда на зажим. Усилие зажима ленты регулируется с помощью винта, благодаря чему . имеется возможность устанавливать оптимальную величину усилия зажима, достаточного для надежного зажима ленты различной толщины и исключающего повреждение лицевой поверхности материала.
Одновременно с заЯсимом происходит воздействие на датчик 16, в результате чего на его выходе появляется .сигнал, который поступает на второй вход блока 22. Наличие сигналов на первом и втором входах блока 22 и отсутствие сигнала на третьем его входе вызывает появление сигналов на выходах элемента 33,, элемента 42, элемента НЕ 38. Наличие сигналов одновременно на трех входах элемента И 35 вызывает появление сигнала на его выходе, который поступает на второй вход элемента ШШ 42 и запоминается, а также цоступает на первый выход собственного блока и на вход команды Вперед привода 8 каретки и поступает на запретный Iвход схемы 34, предотвращающий противоположное включение привода 8, в результате чего дается команда на гГеремещение каретки 7 с зажатой механизмом захвата лентой вперёд. Датчик 13 освобождается, исчезают сигналы на его выходе, на третьем входе блока 20, на втором входе блока 21, на четвертом входе блока 22, на третьем входе элемента 48, на первом входе элемента ИЛИ 30, на входе элемента НЕ 40 и появляется сигнал на его выходе на втором входе элемента И 37. Каретка 7, при прибытии в крайнее переднее положение, всту-- пает во взаимодействие с датчиком 14, в результате чего на его выходе появляется сигнал, который поступает на третьи входы блока 22 и.23
Наличие сигнала на третьем входе блока 22 вызывает исчезновение сигналов на выходах элементов НЕ 38 и И 35, на выходе собственного блока и на входе привода 8, в результате чего кареТка 7 останавливается в крайнем переднем положении.
Наличие сигнала на третьем входе блока 23 вызывает появление сигнала
на выходе элемента ШШ , на одном из входов элемента И 46, и на втором входе элемента И 47.
Наличие сигнала одновременно на двух входах элемента И 47 вызывает появление сигнала на его выходе, на выходе собственного блока,на входе привода 6 механизма резки и пробивки и на пятом входе блока 22.
Привод 6 аналогично вышеописанному осуществляет рабочий ход механизма резки и пробивки. Наличие сигналов на пятом и отсутствие на четвертом входах блока 22 вызывает по- явление сигналов на выходах элемента НЕ 40, элемента ИЛИ 43 и элемента И 37, который поступает на один из входов элемента И 36, на второй вход элемента ИЛИ 43 и запоминается.
При завершении полного рабочего Кода механизм резки и пробивки во- Ьдействует на датчик 17, в резуль- taTa чего на его выходе появляется . сигнал, который поступает на чет- йертые входы блоков 21 и 23.
Наличие сигнала на четвертом входе блока 21 приводит к отсутствию сигналов на выходах элементов НЕ 32 И И 29, а также на вьпсода собственно i|o блока и на входе привода 4, в ре зультате чего механизм захвата перемещается в исходное нерабочее поло- яение.
При перемещении механизма в исходное нерабочее положение на выходе датчика 16 и на вьйсоде элемента ШШ 42 исчезают сигналы, и отработанньпй р емень падает в накопительный лоток. I Наличие сигнала на четвертом входе блока 23 приводит к появлению сиг на входе элемента ШШ 45 и на BhropoM входе элемента И 46. Наличие о;цновременно двух сигналов на входе элемента И 46 вызывает появление сигнала на его выходе, который поступает на второй вход элемента ИЛИ 45 и запоминается, а также поступает на вход элемента 40 задержки.
После истечения заданной вьщерж- ки времени на выходе элемента 49 появляется сигнал, который поступает на запретный вход элемента ЗАПРЕТ 48 Б результате чего исчезают сигналы на его выходе, на выходе элемента И 47 и на собственного блока, а также на входе привода 6 и на пято входе блока 2. В результате исчезновения сигнала на входе привода 6
0
5
0
5
0
5
0
5
дается команда на перемещение в исходное нерабочее положение, при этом датчик 17 освобождается от воздействия механизма резки и на его выходе и на четвертых входах блоков 21 и 23 исчезают сигналы, а также освоболщает- ся задняя окончательно обработанная часть ремня и под действием собственного веса ремень падает вниз в накопительный лоток. Исчезновение сигнала на пятом входе блока 22 вызывает появление сигнала на выходе элемента НЕ 41 и на четаертом.входе элемента И 36. Наличие одновременно четырех сигналов на выходе элемента И 36 вызывает появление сигнала на его выходе и на втором выходе собственного блока, а также на входе команды Назад при- вода 8, и вызывает появление сигнала на запретном входе схемы 33,предотвращая противоположное включение привода 8, в результате чего дается команда на перемещение элемента И 47 НАЗАД в зону заправки.
Освобождается датчик 14, исчезают сигналы на его выходе, на третьих входах блоков 22 и 23, на втором входе элемента ИЛИ 44, на входе элемента НЕ 38 и появляется сигнал на его выходе и на третьем входе элемента И 35. Каретка 7 при прибытии в крайнее заднее исходное положение вступает во взаимодействие с д атчиком 13, в результате чего на его выходе появляется сигнал, который поступает на тре- тий вход блока 20, на второй вход блока 21 и на четвертый вход блока 22. Наличие сигнала на четвертом входе блока 22 вызывает появление сигнала на входе элемента НЕ 40 и исчезновение сигналов на его выходе, на выходах элементов И 37 и 36, а также на втором выходе собственного блока и на входе команды Назад привода 8, в результате чего, каретка 7 останавливается точно в положенном месте. Наличие сигнала на втором входе блока 21 вызывает появление сигналов на одном из входов элемента ШШ 30 и на входе элемента И 29. Наличие одновременно сигналов на четырех входах элемента И 29 вызьшает появление сигнала на его вьпсоде, который поступает на второй вход элемента ИЛИ 30 и запоминается, а также поступает на выход собственного блока и на вход привода 4 механизма захвата . При налшчии ленты в зоне заправки осуществляется аналогично вышеописанному захват ленты, после чего на выходе датчика 16 ааягима материала появляется сигнал, который поступает на второй вход блока 22, на пер- вьй вход элемента ИЛИ Д2 и на вход элемента И 35. Наличие одновременно сигналов на трех входах элемента И 35 вызывает появление сигнала на его выходе, который поступает на второй вход элемента ИЛИ 42 и запоминается, а также поступает на первьй выход собственного блока и на вход команды Вперед привода 8. Каретка 7 с зажатой лентой перемещается вперед. Дальше все повторяется аналогично вьше- описанному в следующей последовательности: останов каретки в.крайнем переднем положе}гаи, разрезка ленты, обрабо.тка задней части предыдущего ремня и обработка передней части последующего ремня, освобождение от механизма захвата ранее обработанной передней части ремня и подача его в накопительный лоток, завершение паузы на окончательную разрезку ленты, возврат механизма резки в исход- Ное нерабочее положение и освобождение задней окончательно обработанной части ремня, и подача его в накопительный ло- то , возврат каретки назад в зону заправки, захват ленты, подача ленты на определенный шаг вперед и т.д. При окончании ленты на размоточном устройстве происходит останов всех исполнительных механизмов в исходном положении и сигнализатор 18 оповещает оператора о необходимости установки нового рулона ленты.
Наличие сигнала на четвертом входе блока 19 вызывает появление сигнала на входе элемента НЕ 27 и исчезновение сигнала на его выходе, на выходе элемента И 25, а также на выходе собственного блока и на первых входах блоков 21-23, в результате чего система управления возвращается в нулевое состояние, исполнительные механизмы останавливаются в исходном положении, а сигнализатор 18 находится во включенном состоянии и своевременно оповещает оператора об окончании ленты.. Сигнал исчезает при отключении вводного выключателя 10 или при заправке размоточного устройства 2 и подачи ленты в зону резки, в результа- т ё чего на выходе датчика Т5 исчезает сигнал, а также исчезают сигналы
на выходе блока 50, на пятом входе блока 19 и на входе сигнализатора 18, после чего система управления становится готовой к запуску установки в автоматическом режиме без затрат времени на первоначальную установку исполнительных механизмов в исходное ;Положение4
0 Таким образом, применение предла- гаемого устройства позволит исключить возможность работы установки вхолостую , экономится электроэнерг гия. Установка может работать с ма5 териалами различной толщины, что улучщает качество изготавливаемых изделий.
Формула изобретения
20
0 чающееся тем, что, с целью повьшения качества изготовляемой продукции, в устройство введены датчики положения каретки, датчик наличия материала-, датчик зажима мате5 риала, датчик хода механизма резки и пробивки, сигнализатор, блок пуска, блок останова, кнопки включения, пуска, останова, соединенные с входами блока пуска,- выходом соединенно0 го с первыми входами блока управления приводами механизма захвата, перемещения каретки и резки и пробивки, а кнопка включения также соединена с первым входом блок-а останова, вто5 рой вход которого соединен с датчиком наличия материала, третий вход - с первым датчиком положения каретки, - выход блока останова соединен с сигнализатором и четвертым входом блока
Q пуска, причем первый датчик положения каретки дополнительно соединен с вторым входом блока управления механизмом захвата, третий вход которого соединен с кнопкой пуска, а четвертый вход - с датчиком хода меха. низма резкп, а датчик зажима материала соединен с вторым входом блока управления перемещением каретки, третий вход которого соединен с вторым
датчиком положения каретки, соединенным- также с .третьим: входом блока управления приводом механизма резки и пробивки, четвертый вход блока уп- равления приводом перемещения каретки соединен с первым датчиком положения каретки, причем второй вход блока управления приводом механизма резки и пробивки соединен с кнопкой пуска, четвертый вход блока управления приводом механизма резки и пробивки соединен с датчиком хода механизма резки и пробивки, а выход блока управления приводом механизма pesки и пробивки соединен с пятым входом блока управления приводом перемещения каретки.
2,Устройство по П.1, отличающееся тем,что блок пуска со- держит схемы ИЖ, И и инверторы, причем первьЧй вход схемы И соединен с первым входом блока пуска, второй
вход схемы И соединен с выходом схемы ИЛИ, третий и четвёртьй входы схемы И соединены с выходами первого и второго инверторов, входы которых являются соответственно третьим и четвертым входами блока пуска, .второй вход которого является вторым входом I схемы ИЛИ, второй вход которой соединен с выходом схемы И, выход которой является выходом блока пуска.
; 4. Устройство по п.1, о т л и - 1ч а ю щ е е с я тем, что блок управ- ления приводом механизма захвата со- |держит схемы И, ИЛИ, инверторы, при- |чем первый вход схемы И является пер- :вым входом блокн управлеНия приводом механизма захвата, третий и четвертый входы которого через соответственно первый и второй инверторы соединены с третьим и четвертым входами схемь И, выход которой является выходом блока управления механизмом захвата и первым входом схемы ИЛИ, второй вход которой является вторым входом блока управления механизмом захвата.
, |0 jg
20
25 20
...
м 35
45
мента ЗАПРЕТ соединен с первым входом первой схемы И, второй вход которой соединен d выходом первой схемы ИЛИ, а третий вход - с выходом первого инвертора, причем выход первой схемы И соединен с первым входом первой схемы ИЛИj вторым входом второй схемы Запрет и является первым выходом блока управления приводом перемещения каретки, второй вход первой схемы ИЛИ является вторым входом блока управления приводом перемещения каретки, соединенньм с вторым инвертором, который выходом соединен с третьим входом второй схемы И, первый вход которой соединен с выходом второго элемента ЗАПРЕТ, а второй вход - с выходом третьей схемы И, первым входом второй схемы ИЛИ, выход которой подключен к первому входу третьей схемы И, а второй вход , подключенный через третий инвертор, является пятым входом блока управления приводом перемещения каретки, который через четвертый инвертор соединен с четвертым входом второй схемы И,, выход которой подключен к второму выходу блока управления приводом перемещения каретки и второму входу первого элемента ЗАПРЕТ, а второй вход третьей схемы И через пятый инвертор подсоединен к четвертому входу блока управления приводом перемещения каретки,
входу линии задержки, соединенному с вторым входом второй схемы ИЛИ, а
1Ш
выход линии задержки соединен с вторым входом элемента ЗАПРЕТ.
| Регулирующее приспособление для ветряных двигателей со складными перьями или лопастями | 1924 |
|
SU1656A1 |
| Л П | |||
