Изобретение относится к управлению автоматом укладки кирпича.
Целью изобретения является повышение точности управления.
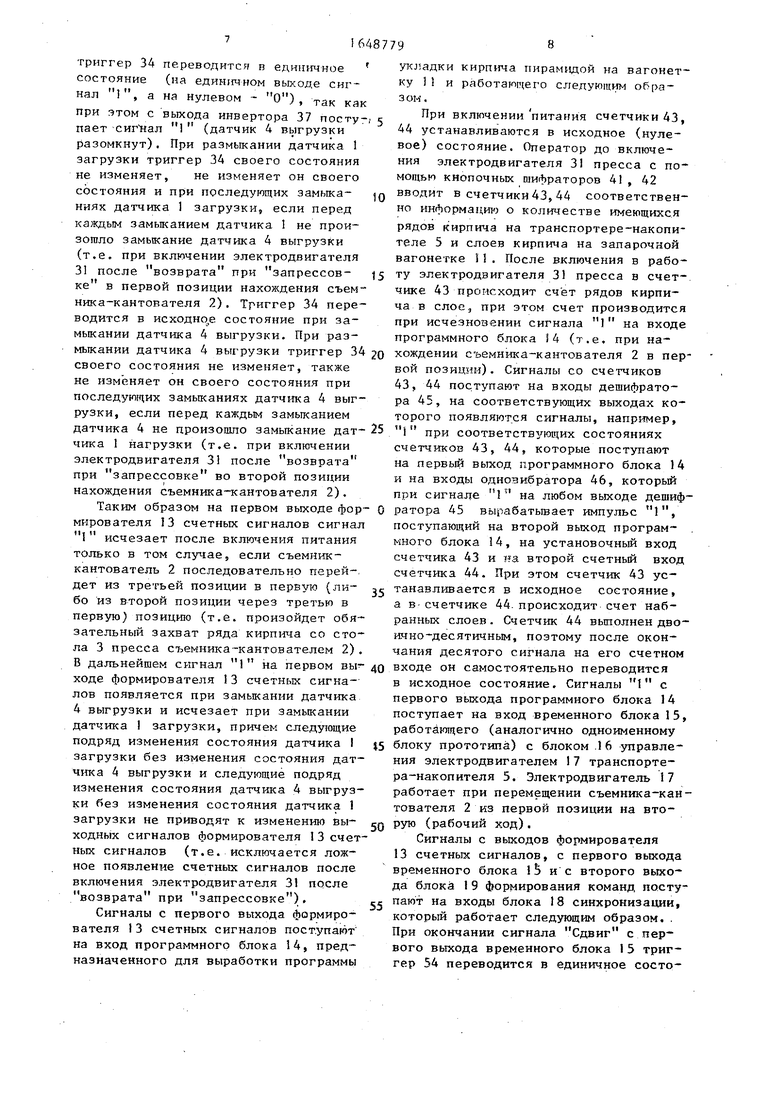
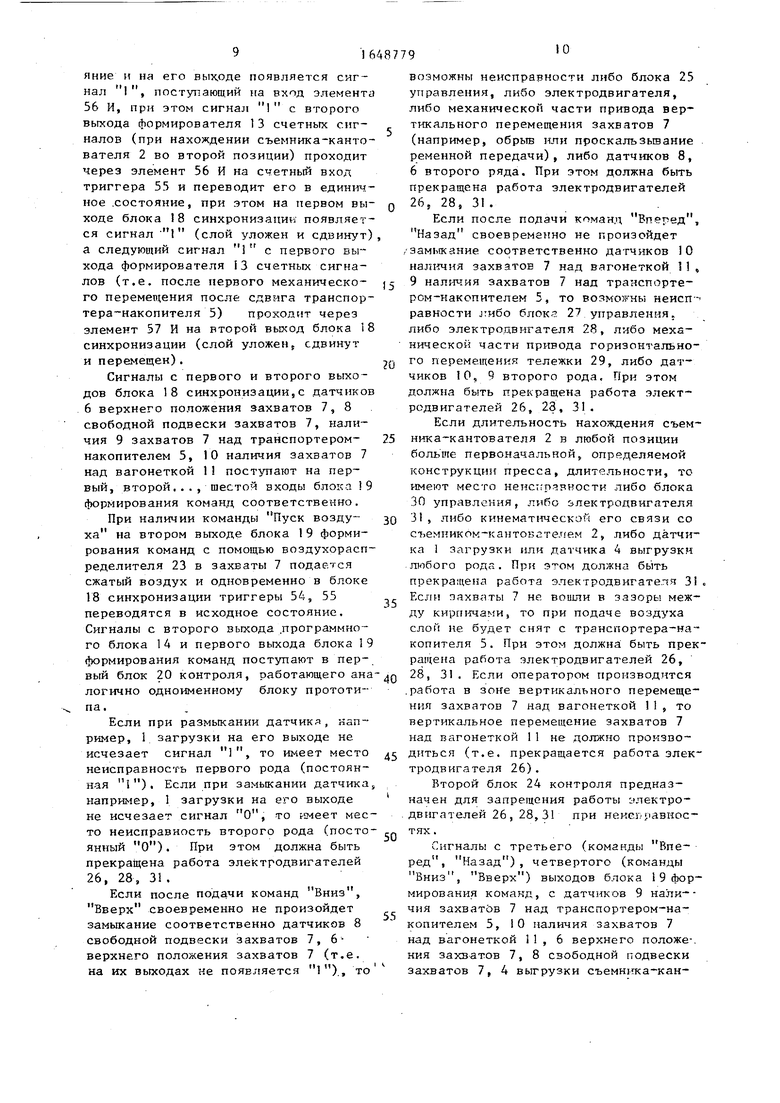
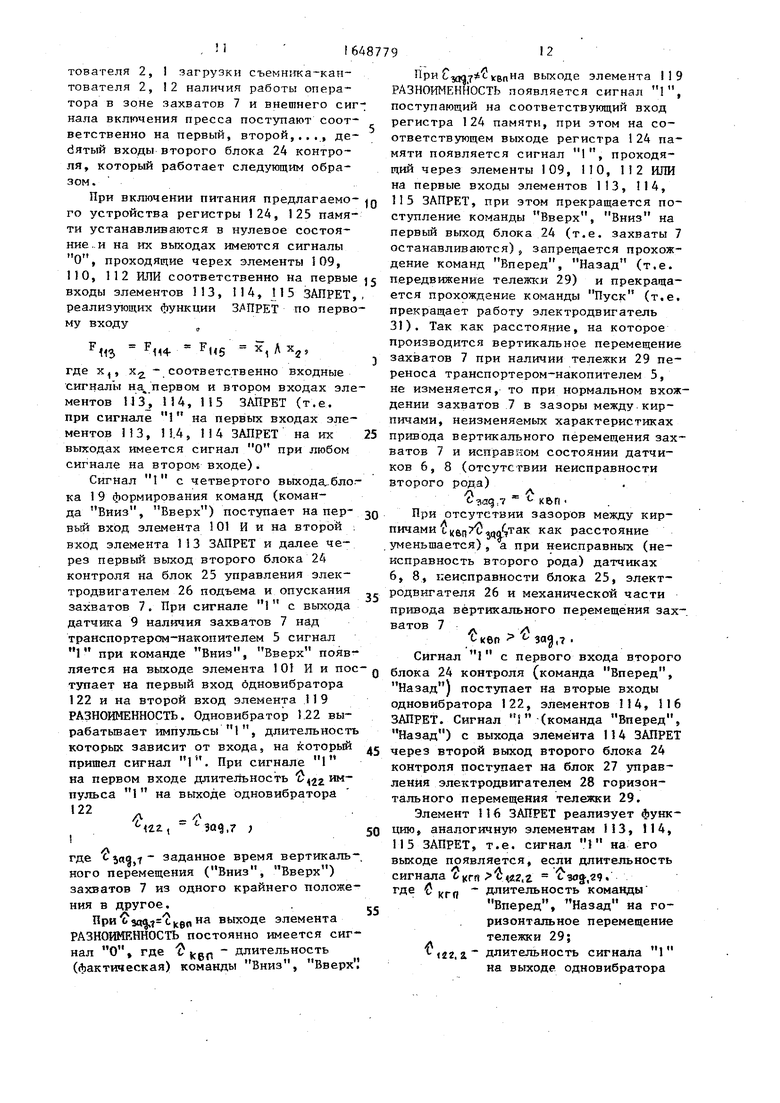
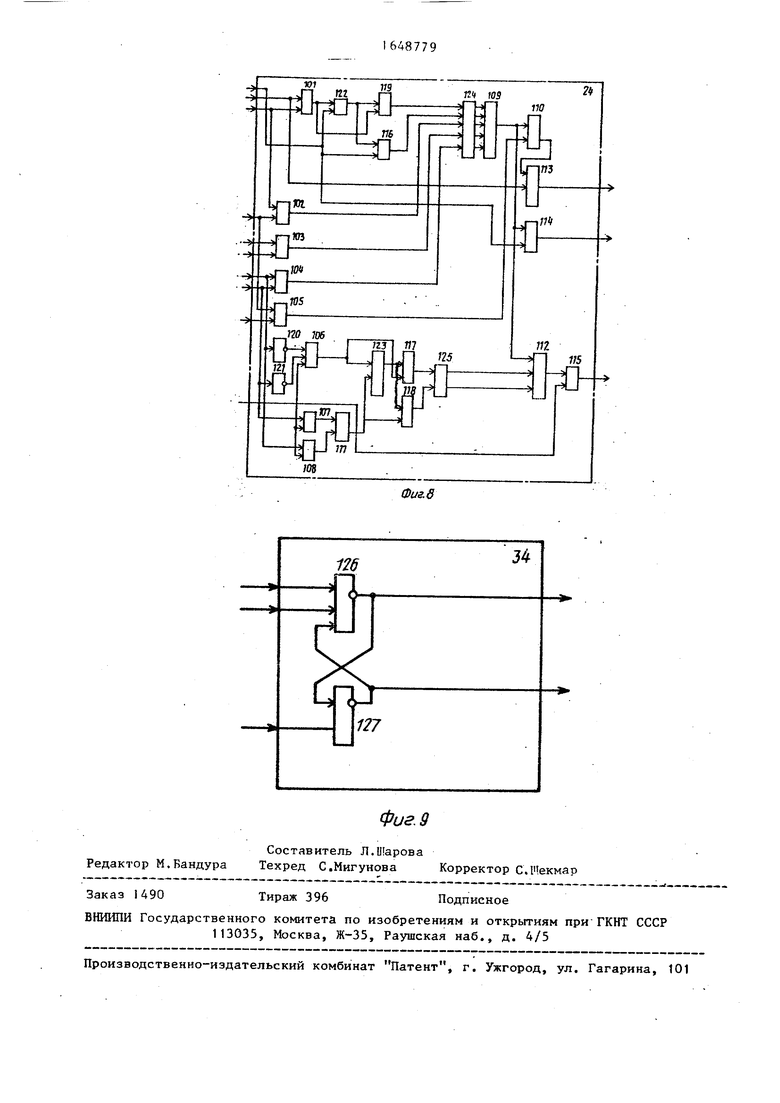
На фиг.1 приведена блок-схема устройства; на фиг.2 - 9 - функциональ- ные схемы формирователя счетных сигналов, программного и временного блоков, блоков синхронизации и формирования команд, первого и второго блоков контроля и потенциального триггера, входящего в формирователь счетных импульсов, соответственно.
Устройство автоматического управления автоматом для укладки кирпича содержит датчик 1 загрузки съемника- кантователя 2 на столе 3 пресса, датчик 4 выгрузки съемника-кантователя 2 на транспортере-накопителе 5, чик 6 нахождения захватов 7 в верхнем положении, датчик 8 свободной подвес- ки захватов, датчик 9 наличия захватов над местом съема, датчик 10 наличия захватов над вагонеткой 11, датчик 12 наличия работы оператора в зоне захватов, формирователь 13 счетных сигналов, программный блок 14, временной блок 15, блок 16 управления электродвигателем 17 транспортера-накопителя, блок 18 синхронизации, блок 19 формирования команд, первый блок 20 контроля, блок 21 управления электромагнитом 22 воздухораспределителя 23, второй блок 24 контроля, блок 25 управления электродвигателем 26 подъема и опускания захватов, блок 27 уп- равления электродвигателем 28 передвижения тележки 29, блок 30 управления электродвигателем 31 пресса. На транспортере расположены кирпичи 32.
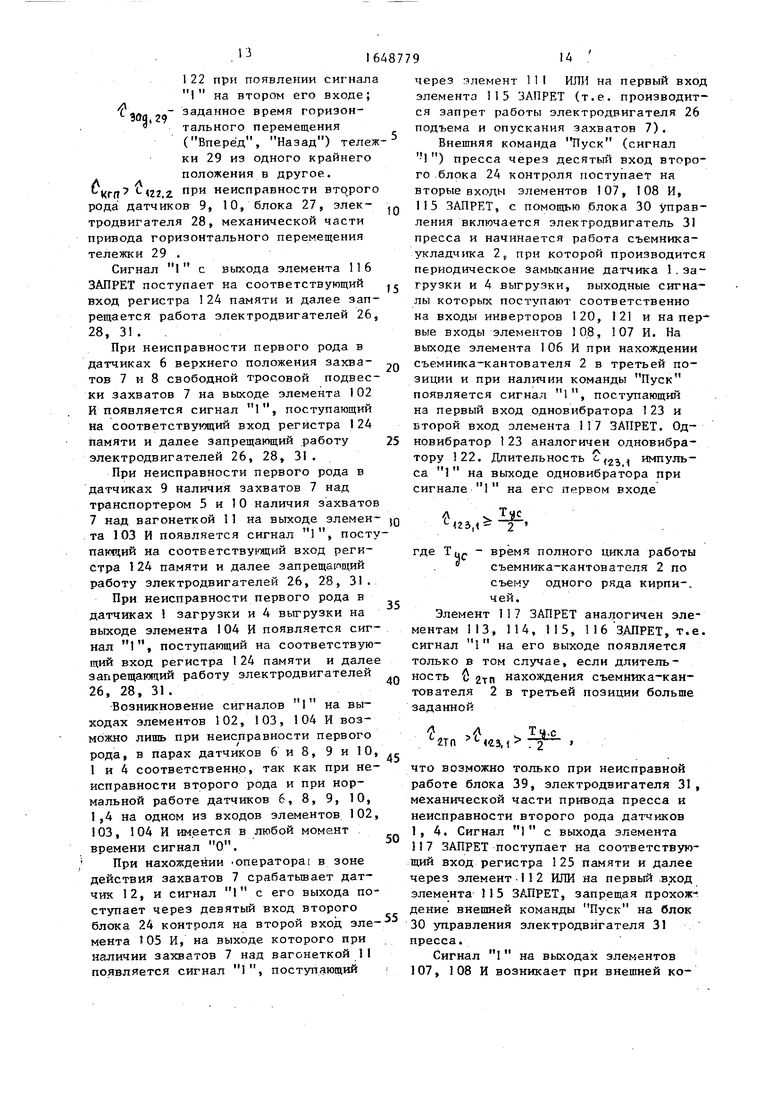
Формирователь J 3 счетных сигналов содержит генератор 33 установленного импульса, потенциальный RS-триггер 34, JK-триггер 35, элемент 36 ИЛИ,
5
5
0
0 35 40 4550
55
инвертор 37 и элементы 38, 39, 40 И-НЕ.
Программный блок 14 содержит кнопочный шифратор 41 начального количества рядов, кнопочный шифратор 42 начального количества слоев, двоичный счетчик 43 рядов, двоично-десятичный счетчик 44 слоев, дешифратор 45 и од- новибратор 46.
Временной блок 15 предназначен для выработки временного интервала сдвига транспортера-накопителя 5. Сдвиг необходим Для формирования на вагонетке 11 штабеля кирпича необходимой конфигурации и для захвата кирпичей 32 пневмозахватами 7. Так как длина слоя неодинакова, то и временной сдвиг будет тем больше, чем короче слой.
Блок 15 содержит ждущие мультивибраторы 47-52 и схему 53 ИЛИ.
Блок 18 синхронизации содержит триг геры54,55и элементы 56, 57 И.
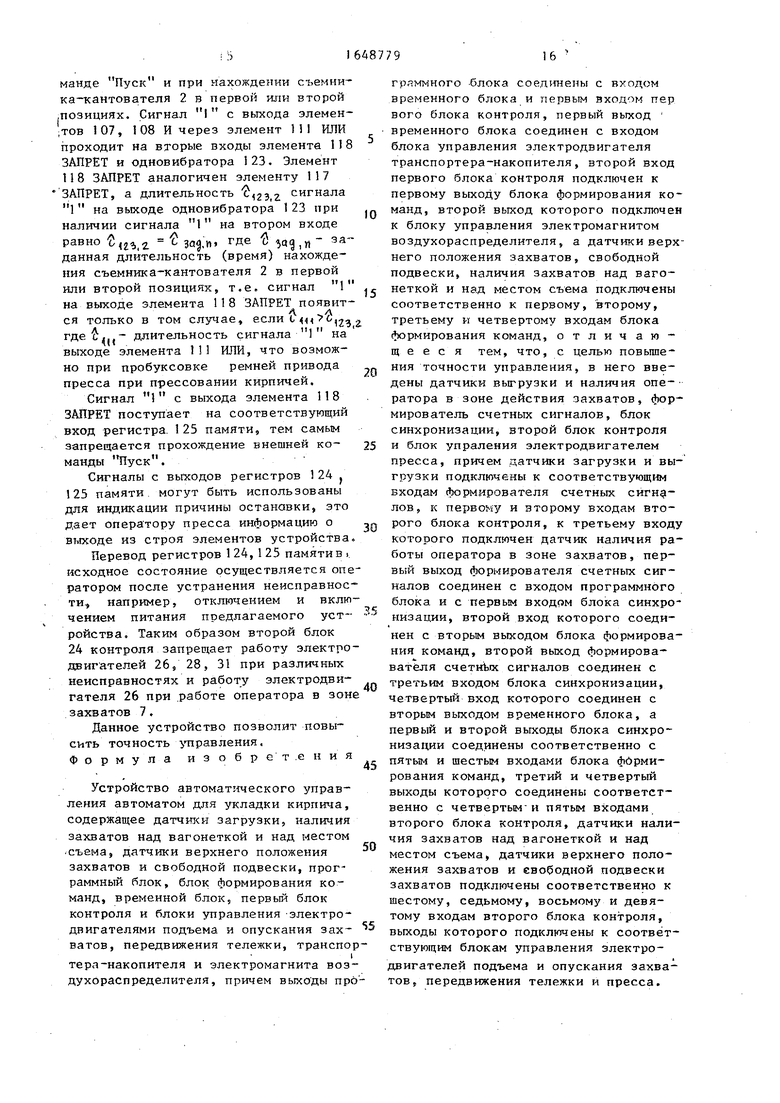
Блок 19 формирования команд предназначен для выработки последовательности команд включения блоков управления электродвигателями автоматов укладки кирпича. В блоке 19 осуществляются все необходимые блокировки по движению механизмов. Блок 19 содержит триггеры 58-63, инверторы .64-68, схемы 69-73 И, формирователи 74-78 импульсов, ждущий мультивибратор 79, усилительные элементы 80-84.
Первый блок 20 контроля предназначен для контроля количества циклов, т.е. учета загруженных вагонеток 1 1. Блок 20 содержит формирователи 85, 86 импульсов, триггеры 87, 88, 89, ждущий мультивибратор 90, мультивибратор 91, схемы 92, 93 И, усилительные элементы 94, 95, 96, промежуточные реле 97, 98, схему 99 индикации, электромеханический счетчик 100.
Второй блок 24 контроля содержит элементы 101-108 И, 109-112 {ЩИ, 113118 ЗАПРЕТ, 119 РАЗНОИМЕННОСТЬ, инвер торы 120, 121, одновибраторы 122, 123 и регистры 124, 125 памяти.
Блок 30 управления вьтолнен аналогично блоку 16.
В качестве датчиков 1, 4, 6, 8, 9 и 10 использованы бесконтактные путевые выключатели типа БВК, КВП, КВД а в качестве датчика 12 использован фотодатчик.
Устройство автоматического управления автоматом для укладки кирпича работает следующим образом.
При работе электродвигателя 31 пресса съемник-кантователь 2 снимает со стола 3 пресса ряд из четырех кирпичей 32, ставит его на транспортер- накопитель 5 (рабочий ход съемник а15 на входах формирователя 13 (т.е. при нахождении съемника-кантователя 2 перед включением электродвигателя 31 в любой позиции) триггер 34 устанавливается в исходное состояние (на нуле™
кантователя 2) и возвращается обратно 20 вом выходе сигнала 1, а на единичном - О).
После включения питания при нахож(холостой ход). При каждом холостом ходе съемника-кантователя 2 лента
вход формирователя 13 счетных сигналов, который работает следующим образом. j При включении питания устройств,
которое осуществляется перед включением пресса, генератор 33 вырабатывает кратковременный импульс О, поступающий на первый вход триггера 34 ч на установочный вход триггера 35,
0 при этом на единичном выходе триггера 35 имеется сигнал О, инвертируемый элементом 38 в сигнал 1, который поступает на третий вход триггера 34, при этом при любых сигналах
5 на входах формирователя 13 (т.е. при нахождении съемника-кантователя 2 перед включением электродвигателя 31 в любой позиции) триггер 34 устанавливается в исходное состояние (на нуле™
вом выходе сигнала 1, а на единичном - О).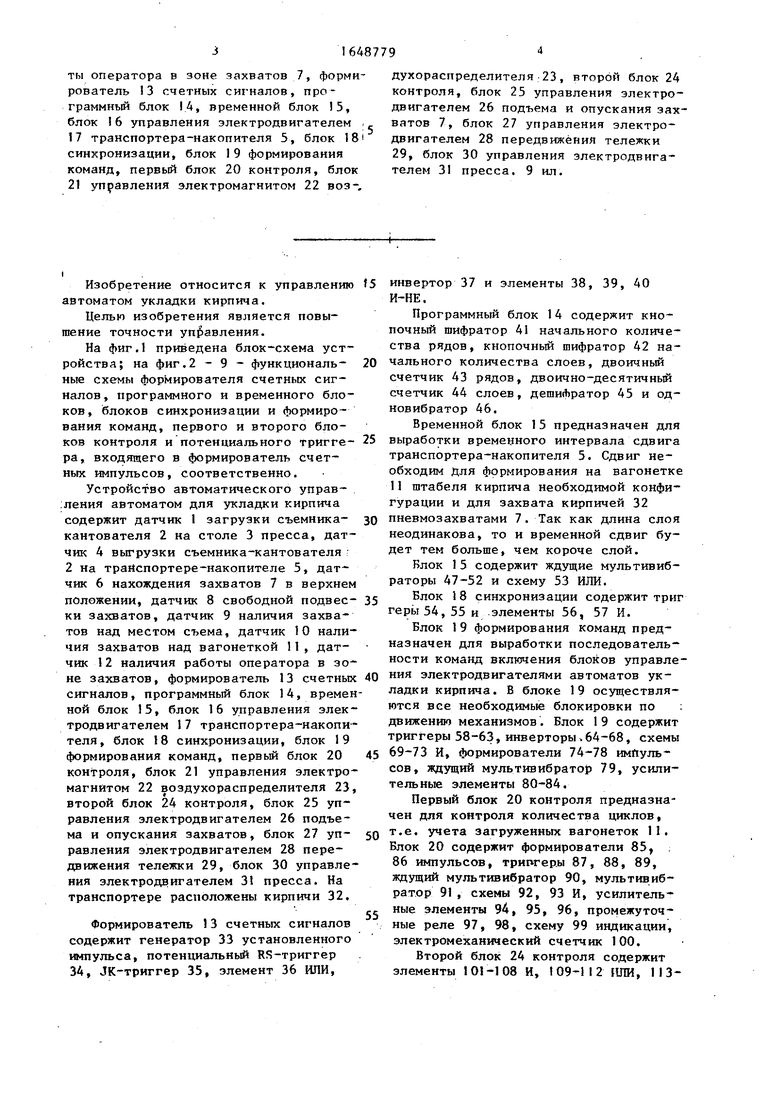

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство управления автоматом для укладки кирпича | 1990 |
|
SU1726265A1 |
| УСТРОЙСТВО УПРАВЛЕНИЯ АВТОМАТОМ ДЛЯ УКЛАДКИ КИРПИЧА | 1991 |
|
RU2028208C1 |
| Устройство для управления автоматом-укладчиком силикатного кирпича | 1987 |
|
SU1529178A1 |
| Устройство для управления автоматом укладки кирпича | 1987 |
|
SU1560711A1 |
| Устройство для контроля работы пресса | 1988 |
|
SU1521607A1 |
| Система управления автоматом-садчиком кирпича | 1989 |
|
SU1648780A1 |
| Устройство для съема кирпича с пресса и укладки его на запарочную вагонетку | 1987 |
|
SU1556917A1 |
| Устройство управления электродвигателем транспортера-накопителя автомата для укладки кирпича | 1989 |
|
SU1694391A1 |
| Система автоматического управления укладкой кирпича | 1985 |
|
SU1315325A1 |
| Устройство для автоматического управления укладкой кирпича | 1983 |
|
SU1209544A1 |
Изобретение относится к управлению автоматом укладки кирпича и поз- повысить точность управления, Устройство содержит датчик 1 загрузки съемника-кантователя 2 на столе 3 пресса, датчик 4 выгрузки съемника- кантователя на транспортере-накопителе 5, датчик 6 К& кцеы-ч захватов 7 в верхнем положении, датчик 8 свободной подвески захватов 7, датчик 9 наличия захватов 7 над местом съема, датчик 10 наличия захватов 7 над вагонеткой 11, датчик 12 напичия рабо
транспортера-накопителя 5 перемещается на толщину, равную толщине кирпича
ре-накопителе освобождается место для следующего ряда кирпичей. Съемник- кантователь 2 устанавливает кирпичи с зазорами между кирпичами одного ряда. При нахождении съемника-кантователя 2 на столе 3 пресса (первая позиция) замыкается датчик 1 загрузки, при нахождении съемника-кантователя 2 на транспортере-накопителе 5 (вторая позиция) замыкается датчик 4 выгрузки, при нахождении съемника-кантователя 2 в третьей позиции (между столом 3 пресса и транспортером-накопителем 5) датчики 1 загрузки и 4
35)
имеется сигнал
О
а на выходе
элемента 40 И-НЕ и инвертора 37 имеется сигнал 1.
После включения питания при нахож- 30 дении съемника-кантователя 2 во второй позиции на выходах элементов 36 ИЛИ, 40 И-НЕ (т.е. на счетном входе триггера 35) и инвертора 37 имеется
сигнал 0, а на выходе элемента 39
35
И-НЕ - сигнал 1 .
После включения питания при нахождении съемника-кантователя 2 в третьей позиции на выходах элементов 36 ИЛИ, 39, 40 И-НЕ (т.е. на счетном вховыгрузки находятся в разомкнутом сое- п де триггера 35) и на выходе инвертора --iii и
тоянии. При замыкании датчиков 1 загрузки, 4 выгрузки, 6 верхнего положения захватов 7, 8 свободной подвески захватов 7, 9 наличия захватов 7 над местом съема транспортером-накопителем 5, 10 наличия захватов 7 над вагонеткой 11, 12 наличия работы оператора в зоне захватов 7 на их выходах появляется сигнал логической 1, длительность которого равна длительности замыкания соответствующего датчика 1,4, 6, 8, 9, 10, 12. При размыкании датчика 1, 4, 6, 8, 9, 10, 12 на его выходе появляется
37 имеется сигнал 1, Триггер 35 переводится в единичное состояние при исчезновении на его входе сигнала 1 (т.е. при переходе при включении элек45 тродвигателя 31 съемника-кантователя 2 из третьей позиции либо в первую8 либо во вторую позицию). При нахожде нии триггера 35 в единичном состоянии на его единичном выходе имеется сигнал
5Q 1, а на нулевом выходе (т.е. выходах элементов 39, 40 И-НЕ, 36 ИЛИ) появляется сигнал 1, который в дальнейшем не изменяется, что предотвращает переброс триггера 35 в исходное сог- стояние при работе съемника-кантователя 2. При наличии сигнала 1 на единичном выходе триггера 35 сигнал 1 с датчика 1 загрузки инвертирует- ся в сигнал О элементом 38 И-НЕ и
сигнал логического 0 , исчезающий
при замыкании соотпетствующего д атчи ка 1, 49 6, 8, 9, 10, 12. Сигналы 1, О с выходов датчиков 1 загрузки и 4 выгрузки поступают на соответствующий
дении съемника-кантователя 2 впервой позиции на выходе элемента 36 ИЛИ, 39
35)
имеется сигнал
О
а на выходе
элемента 40 И-НЕ и инвертора 37 имеется сигнал 1.
После включения питания при нахож- дении съемника-кантователя 2 во второй позиции на выходах элементов 36 ИЛИ, 40 И-НЕ (т.е. на счетном входе триггера 35) и инвертора 37 имеется
сигнал 0, а на выходе элемента 39
п де триггера 35) и на выходе инвертора --iii и
55
37 имеется сигнал 1, Триггер 35 переводится в единичное состояние при исчезновении на его входе сигнала 1 (т.е. при переходе при включении элек45 тродвигателя 31 съемника-кантователя 2 из третьей позиции либо в первую8 либо во вторую позицию). При нахожде нии триггера 35 в единичном состоянии на его единичном выходе имеется сигнал
5Q 1, а на нулевом выходе (т.е. выходах элементов 39, 40 И-НЕ, 36 ИЛИ) появляется сигнал 1, который в дальнейшем не изменяется, что предотвращает переброс триггера 35 в исходное сог- стояние при работе съемника-кантователя 2. При наличии сигнала 1 на единичном выходе триггера 35 сигнал 1 с датчика 1 загрузки инвертирует- ся в сигнал О элементом 38 И-НЕ и
триггер 34 переводится
в единичное состояние нал 1, а на нулевом - О), так
648779 f
10
укладки кирпича пирамидой на вагонетку 1 и работаюг(его следующим образом,
При включении питания счетчики 43, 44 устанавливаются в исходное (нулевое) состояние. Оператор до включения электродвигателя 3 пресса с помощью кнопочных шифраторов 41 , 42 вводит в счетчики43,44 соответственно информацию о количестве имеющихся рядов кирпича на транспортере-накопителе 5 и слоев кирпича на запарочной вагонетке 1. После включения в работу электродвигателя 31 пресса в счет чике 43 происходит счет рядов кирпича в слое, при этом счет производится при исчезновении сигнала 1 на входе программного блока 14 (т.е. при на- мыкании датчика 4 выгрузки триггер 34 20 хождении съемника-кантователя 2 в пер(на единичном выходе сиг- на нулевом - О), так как при этом с выхода инвертора 37 посту-,. $ пает сиг нал (датчик 4 выгрузки разомкнут). При размыкании датчика 1 загрузки триггер 34 своего состояния не изменяет, не изменяет он своего состояния и при последующих замыканиях датчика 1 загрузки, если перед каждым замыканием датчика 1 не произошло замыкание датчика 4 выгрузки (т.е. при включении электродвигателя
31 после возврата при запрессовке1 в первой позиции нахождения съемника-кантователя 2). Триггер 34 переводится в исходно состояние при замыкании датчика 4 выгрузки. При раз15
своего состояния не изменяет, также не изменяет он своего состояния при последующих замыканиях датчика 4 выгрузки, если перед каждым замыканием датчика 4 не произошло замыкание дат- 25 чика 1 нагрузки (т.е. при включении электродвигателя 31 после возврата при запрессовке во второй позиции нахождения съемника-кантователя 2).
Таким образом на первом выходе фор- о ратора 45 вырабатывает импульс Г
счетных сигналов сигнал
мирователя 13 I исчезает после включения питания только в том случае, если съемник- кантователь 2 последовательно перейдет из третьей позиции в первую (либо из второй позиции через третью в первую) позицию (т.е. произойдет обязательный захват ряда кирпича со стола 3 пресса съемника-кантователем 2). В дальнейшем сигнал 1 на первом выходе формирователя 13 счетных сигналов появляется при замыкании датчика 4 выгрузки и исчезает при замыкании датчика I загрузки, причем следующие подряд изменения состояния датчика I загрузки без изменения состояния датчика 4 выгрузки и следующие подряд изменения состояния датчика 4 выгрузки без изменения состояния датчика 1 загрузки не приводят к изменению выходных сигналов формирователя 1 3 счетных сигналов (т.е. исключается ложное появление счетных сигналов после включения электродвигателя 31 после возврата при запрессовке).
Сигналы с первого выхода формирователя 13 счетных сигналов поступают на вход программного блока 14, предназначенного для выработки программы
f
8
укладки кирпича пирам ку 1 и работаюг(его с зом,
вой позиции). Сигналы со счетчиков 43, 44 поступают на входы дешифратора 45, на соответствующих выходах которого появляются сигналы, например, 1 при соответствующих состояниях счетчиков 43, 44, которые поступают на первый выход программного блока 14 и на входы оджтзибратора 46, который при сигнале 1 на любом выходе дешиф5
0
поступающий на второй выход программного блока 14, на установочный вход счетчика 43 и га второй счетньй вход счетчика 44. При этом счетчик 43 устанавливается в исходное состояние, а в счетчике 44 происходит счет набранных слоев. Счетчик 44 выполнен двоично-десятичным, поэтому после окончания десятого сигнала на его счетном входе он самостоятельно переводится в исходное состояние. Сигналы 1 с первого выхода программного блока 14 поступает на вход временного блока 15, работающего (аналогично одноименному
5 блоку прототипа) с блоком 16 управления электродвигателем 17 транспортера-накопителя 5. Электродвигатель 17 работает при перемещении съемника-кантователя 2 из первой позиции на вто0 рую (рабочий ход).
Сигналы с выходов формирователя 13 счетных сигналов, с первого выхода временного блока I5 и с второго выхода блока 19 формирования команд постус пают на входы блока 18 синхронизации, который работает следующим образом. При окончании сигнала Сдвиг с первого выхода временного блока 15 триггер 54 переводится в единичное состояние и на его выходе появляется сигнал , поступающий на вход элемента 56 И, при этом сигнал 1 с второго выхода формирователя 13 счетных сигналов (при нахождении съемника-кантователя 2 во второй позиции) проходит через элемент 56 И на сметный вход триггера 55 и переводит его в единичное состояние, при этом на первом выходе блока 18 синхронизации появляется сигнал 1 (слой уложен и сдвинут) а следующий сигнал 1 с первого выхода формирователя 13 счетных сигналов (т.е. после первого механического перемещения после сдвига транспортера-накопителя 5) проходит через элемент 57 И на второй выход блока 18 синхронизации (слой уложен, сдвинут и перемещен).
Сигналы с первого и второго выходов блока 18 синхронизации,с датчиков 6 верхнего положения захватов 7,8 свободной подвески захватов 7, наличия 9 захватов 7 над транспортером- накопителем 5, 10 наличия захватов 7 над вагонеткой 1 поступают на первый, второй,.., шестой входы блока 9 формирования команд соответственно.
При наличии команды Пуск воздуха на втором выходе блока I9 формирования команд с помощью воздухораспределителя 23 в захваты 7 подастся сжатый воздух и одновременно в блоке 18 синхронизации триггеры 54, 55 переводятся в исходное состояние. Сигналы с второго выхода программно - го блока 14 и первого выхода блока 19 формирования команд поступают в первый блок 20 контроля, работающего 28, 31. Если оператором производится
логично одноименному блоку прототипа.
Если при размыкании датчикя, например, 1 загрузки на его выходе не исчезает сигнал 1, то имеет место неисправность первого рода (постоянная 1). Если при замыкании датчика, например, 1 загрузки на его выходе не исчезает сигнал О, то имеет место неисправность второго рода (постоянный О). При этом должна быть прекращена работа электродвигателей 26, 28, 31.
Если после подачи команд Вниз, Вверх своевременно не произойдет замыкание соответственно датчиков 8 свободной подвески захватов 7, 6- верхнего положения захватов 7 (т.е. на их выходах не появляется 1), то
45
50
55
работа в зоне вертикального перемещения захватов 7 над вагонеткой 11, то вертикальное перемещение захватов 7 над вагонеткой 11 не должно производиться (т.е. прекращается работа элек тродвигателя 26) .
Второй блок 24 контроля предназначен для запрещения работы электродвигателей 26, 28,31 при неисправностях .
Сигналы с третьего (команды Вперед, Назад), четвертого (команды Вниз, Вверх) выходов бпока Сформирования команд, с датчиков 9 нали- чия захватов 7 над транспортером-накопителем 5, 10 наличия захватов 7 над вагонеткой 1, 6 верхнего положения захватов 7, 8 свободной подвески захватов 7, 4 выгрузки съемнпса-кан
0
5
возможны неисправности либо блока 25 управления, либо электродвигателя, либо механической части привода вертикального перемещения захватов 7 (например, обрыв или проскальзывание ременной передачи), либо датчиков 8, 6 второго ряда. При этом должна быть прекращена работа электродвигателей 26, 28, 31.
Если после подачи команд Вперед, Назад своевременно не произойдет ,замыкание соответственно датчиков 10 наличия захватов 7 над вагонеткой 11, 9 наличия захватов 7 над транспортером-накопителем 5, то возможны неисп-- равности гчбо блок. 27 управления, либо электродвигателя 28, либо механической части привода горизонтального перемещения тележки 29, либо датчиков 10, Ч второго рода. При этом должна быть прекращена работа электродвигателей 26, 23, 31.
Если длительность нахождения съемника-кантователя 2 в любой позиции больше первоначальной, определяемой конструкции пресса, длительности, тс имеют место ненсгпзлвости либо блока 30 управления, либо электродвигателя 31, либо кинематическом его связи со съемником-кантовгтепем 2, либо датчика 1 загрузки или датчика ч выгрузки любого рода. При должна быть прекращена работа элекгродвигатетч 31. Если тахваты 7 не вошли в зазоры между кирпичами, то при подаче воздуха слой не будет снят с транспортера-накопителя 5. При этом должна быть прекращена работа электродвигателей 26,
5
0
5
работа в зоне вертикального перемещения захватов 7 над вагонеткой 11, то вертикальное перемещение захватов 7 над вагонеткой 11 не должно производиться (т.е. прекращается работа электродвигателя 26) .
Второй блок 24 контроля предназначен для запрещения работы электродвигателей 26, 28,31 при неисправностях .
Сигналы с третьего (команды Вперед, Назад), четвертого (команды Вниз, Вверх) выходов бпока Сформирования команд, с датчиков 9 нали- чия захватов 7 над транспортером-накопителем 5, 10 наличия захватов 7 над вагонеткой 1, 6 верхнего положения захватов 7, 8 свободной подвески захватов 7, 4 выгрузки съемнпса-кан.И 16
тователя 2, 1 загрузки съемника-кантователя 2, 12 наличия работы оператора в зоне захватов 7 и внешнего сиг нала включения пресса поступают соответственно на первый, второй,..., де- 3ятый входы второго блока 24 контроля, который работает следующим образом.
При включении питания предлагаемо- го устройства регистры 124, 125 памяти устанавливаются в нулевое состояние, и на их выходах имеются сигналы О, проходящие черех элементы 109,
ПО, 112 ИЛИ соответственно на первые jj передвижение тележки 29) и прекращавходы элементов ИЗ, 114, 115 ЗАПРЕТ,, реализующих функции ЗАПРЕТ по первому входу
ется прохождение команды Пуск (т.е. прекращает работу электродвигатель 31). Так как расстояние, на которое производится вертикальное перемещение захватов 7 при наличии тележки 29 переноса транспортером-накопителем 5, не изменяется, то при нормальном вхождении захватов 7 в зазоры между кирпичами, неизменяемых характеристиках привода вертикального перемещения захватов 7 и исправном состоянии датчиков 6, 8 (отсутствии неисправности
:«3
X
F
«. - F(45 ,ЛХ2 2 - соответственно входные
, Вверх) поступает на пер- элемента 101 И и на второй
где Л,,
сигналы на первом и втором входах элементов 113, 114, 115 ЗАПРЕТ (т.е. при сигнале 1 на первых входах элементов 113, 11.4, 114 ЗАПРЕТ на их выходах имеется сигнал О при любом сигнале на втором входе).
Сигнал 1 с четвертого выхода бло.- ка 19 формирования команд (команда Вниз1 вьй вход
вход элемента ИЗ ЗАПРЕТ и далее через первый выход второго блока 24 контроля на блок 25 управления электродвигателем 26 подъема и опускания захватов 7. При сигнале 1 с выхода датчика 9 наличия захватов 7 над транспортером-накопителем 5 сигнал 1 при команде Вниз, Вверх появляется на выходе элемента 101 И и поступает на первый вход одновибратора 122 и на второй вход элемента 119 РАЗНОИМЕННОСТЬ. Одновибратор 122 вырабатывает импульсы 1, длительность которых зависит от входа, на который пришел сигнал 1. При сигнале 1
на первом входе длительность импульса 1 на выходе одновибратора
122
.
30$,7 }
Я
где с. jag 1 заданное время вертикаль-, ного перемещения (Вниз, Вверх)
7 из одного крайнего положезахватов
ния
в другое.
ПриЈад$ 2|сеона выхоп-е элемента РАЗНОИШШНОСТЬ постоянно имеется сигнал О, где Длительность (фактическая) команды Вниз, Вверх.
9
12
При C-joQT 0 квпна выходе элемента 119
РАЗНОИМЕННОСТЪ появляется сигнал Г1, поступающий на соответствующий вход регистра 124 памяти, при этом на соответствующем выходе регистра 124 памяти появляется сигнал 1, проходящий через элементы 109, 110, 112 ИЛИ на первые входы элементов 113, 114, 115 ЗАПРЕТ, при этом прекращается поступление команды Вверх, Вниз на первый выход блока 24 (т.е. захваты 7 останавливаются), запрещается прохождение команд Вперед, Назад (т.е.
3
0
5
5
ется прохождение команды Пуск (т.е. прекращает работу электродвигатель 31). Так как расстояние, на которое производится вертикальное перемещение захватов 7 при наличии тележки 29 переноса транспортером-накопителем 5, не изменяется, то при нормальном вхождении захватов 7 в зазоры между кирпичами, неизменяемых характеристиках привода вертикального перемещения захватов 7 и исправном состоянии датчиков 6, 8 (отсутствии неисправности
второго рода) f t- зад .7
При отсутствии зазоров между кирпичами Скбп/СадеЛтак как расстояние .уменьшается), а при неисправных (неисправность второго рода) датчиках 6, 8, неисправности блока 25, электродвигателя 26 и механической части привода вертикального перемещения захватов 7л
t-квп за),
с кьп
Сигнал I с первого входа второго О блока 24 контроля (команда Вперед, Назад) поступает на вторые входы одновибратора 122, элементов 114, 116 ЗАПРЕТ. Сигнал И1 (команда Вперед, Назад) с выхода элемента 114 ЗАПРЕТ 5 через второй выход второго блока 24 контроля поступает на блок 27 управления электродвигателем 28 горизонтального перемещения тележки 29.
Элемент 116 ЗАПРЕТ реализует функ- 0 цию, аналогичную элементам 113, 114, 115 ЗАПРЕТ, т.е. сигнал 1 на его выходе появляется, если длительность
сигнала ,г ЈзвЈ,29.
где 0 иг„ - длительность команды
5
кгп
«22. Л
Вперед, Назад на горизонтальное перемещение тележки 29;
длительность сигнала 1 на выходе одновибратора
30tj,29
1 22 при появлении сигнала I на втором его входе; заданное время горизонтального перемещения (Вперёд, Назад) тележ ки 29 из одного крайнего положения в другое.
Кгп7 с 422,2 ПРИ неисправности второго рода датчиков 9, 10, блока 27, электродвигателя 28, механической части привода горизонтального перемещения тележки 29 .
Сигнал 1 с выхода элемента 116 ЗАПРЕТ поступает на соответствующий вход регистра 124 памяти и далее запрещается работа электродвигателей 26, 28, 31 .
При неисправности первого рода в датчиках 6 верхнего положения захва- тов 7 и 8 свободной тросовой подвески захватов 7 на выходе элемента 102 И появляется сигнал 1, поступающий на соответствующий вход регистра 124 памяти и далее запрещающий работу электродвигателей 26, 28, 31 .
При неисправности первого рода в датчиках 9 наличия захватов 7 над транспортером 5 и 10 наличия захватов 7 над вагонеткой 11 на выходе элемен- та 103 И появляется сигнал 1, поступающий на соответствующий вход регистра 124 памяти и далее запрещающий работу электродвигателей 26, 28, 31. При неисправности первого рода в датчиках 1 загрузки и 4 выгрузки на выходе элемента 104 И появляется сигнал 1, поступающий на соответствующий вход регистра 124 памяти и далее запрещающий работу электродвигателей
26, 28, 31.
Возникновение сигналов 1 на выходах элементов 102, 103, 104 И возможно лишь при неисправности первого рода, в парах датчиков 6 и 8, 9 и 10, 1 и 4 соответственно, так как при неисправности второго рода и при нормальной работе датчиков 6, 8, 9, 10, 1,4 на одном из входов элементов 102, 103, 104 И имеется в любой момент времени сигнал О.
При нахождении .оператора в зоне действия захватов 7 срабатывает датчик 12, и сигнал 1 с его выхода поступает через девятый вход второго блока 24 контроля на второй вход эле мента 105 И, на выходе которого при наличии захватов 7 над вагонеткой 11 появляется сигнал 1, поступающий
,0
5
5
Q 5
Q
через -элемент 1 1 I ИЛИ на первый вход элемента 115 ЗАПРЕТ (т.е. производится запрет работы электродвигателя 26 подъема и опускания захватов 7).
Внешняя команда Пуск (сигнал 1 ) пресса через десятый вход второго блока 24 контроля поступает на вторые входы элементов 107, 108 И, 115 ЗАПРЕТ, с помощью блока 30 управления включается электродвигатель 31 пресса и начинается работа съемника- укладчика 2 при которой производится периодическое замыкание датчика 1 . загрузки и 4 выгрузки, выходные сигналы которых поступают соответственно на входы инверторов 120, 12 и на пер вые входы элементов 108, 107 И. На выходе элемента 106 И при нахождении съемника-кантователя 2 в третьей позиции и при наличии команды Пуск появляется сигнал 1, поступающий на первый вход одновибратора 123 и второй вход элемента 117 ЗАПРЕТ, Од- новибратор 123 аналогичен одновибра- тору 122. Длительность Ј(2г, импульса 1 на выходе одновибратора при сигнале 1 на егс первом входе
23
,,Ґ
где Тцс - время полного цикла работы съемника-кантователя 2 по съему одного ряда кирпи-. чей.
Элемент 117 ЗАПРЕТ аналогичен элементам 113, 114, 115, 116 ЗАПРЕТ, т.е. сигнал 1 на его выходе появляется только в том случае, если длительность Ј гтп нахождения съемника-кантователя 2 в третьей позиции больше заданной
45
50
5
что возможно только при неисправной работе блока 39, электродвигателя 31 , механической части привода пресса и неисправности второго рода датчиков 1, 4. Сигнал 1 с выхода элемента 117 ЗАПРЕТ поступает на соответствующий вход регистра 125 памяти и далее через элемент 112 ИЛИ на первый вход элемента 115 ЗАПРЕТ, запрещая прохождение внешней команды Пуск на блок 30 управления электродвигателя 31 пресса.
Сигнал 1 на выходах элементов 107, 108 И возникает при внешней ко10
15
анде Пуск и при нахождении съемниа-кантователя 2 в первой или второй озициях. Сигнал I с выхода элемен- тов 107, 108 И через элемент 111 ИЛИ проходит на вторые входы элемента 118 ЗАПРЕТ и одновибратора 123. Элемент 118 ЗАПРЕТ аналогичен элементу 117 ЗАПРЕТ, а длительность Ъ,г сигнала 1 на выходе одновибратора 123 при наличии сигнала 1 на втором входе
равно ,2. Щ. ГДе n ЗЯ данная длительность (время) нахождения съемника-кантователя 2 в первой или второй позициях, т.е. сигнал 1 на выходе элемента 118 ЗАПРЕТ появится только в том случае,, если t ш 23,2 где Ј,. - длительность сигнала 1 на выходе элемента 111 ИЛИ, что возможно при пробуксовке ремней привода пресса при прессовании кирпичей.
Сигнал 1 с выхода элемента 118 ЗАПРЕТ поступает на соответствующий вход регистра 125 памяти, тем самым запрещается прохождение внешней ко- 25 манды Пуск.
Сигналы с выходов регистров 124 125 памяти могут быть использованы для индикации причины остановки, это дает оператору пресса информацию о 0 выходе из строя элементов устройства.
Перевод регистров 124, 125 памяти в исходное состояние осуществляется оператором после устранения неисправности, например, отключением и включением питания предлагаемого устройства. Таким образом второй блок 24 контроля запрещает работу электродвигателей 26, 28, 31 при различных неисправностях и работу электродвигателя 26 при работе оператора в зоне захватов 7.
Данное устройство позволит повысить точность управления. Формула изобретения
35
40
45
5
Устройство автоматического управления автоматом для укладки кирпича, содержащее датчики загрузки, наличия захватов над вагонеткой и над местом съема, датчики верхнего положения захватов и свободной подвески, программный блок, блок формирования команд, временной блок, первый блок контроля и блоки управления электродвигателями подъема и опускания зах-
ватов, передвижения тележки, транспорi
тера-накопителя и электромагнита воздухораспределителя, причем выходы про0
5
5
0
5
0
5
0
граммного блока соединены с входом временного блока и первым входом пер вого блока контроля, первый выход временного блока соединен с входом блока управления электродвигателя транспортера-накопителя, второй вход первого блока контроля подключен к первому выходу блока формирования команд, второй выход которого подключен к блоку управления электромагнитом воздухораспределителя, а датчики верхнего положения захватов, свободной подвески, наличия захватов над вагонеткой и над местом съема подключены соответственно к первому, второму, третьему и четвертому входам блока формирования команд, отличающееся тем, что, с целью повышения точности управления, в него введены датчики выгрузки и наличия оператора в зоне действия захватов, формирователь счетных сигналов, блок синхронизации, второй блок контроля и блок упраления электродвигателем пресса, причем датчики загрузки и выгрузки подключены к соответствующим входам формирователя счетных сигналов, к первому и второму входам второго блока контроля, к третьему входу которого подключен датчик наличия работы оператора в зоне захватов, первый выход формирователя счетных сигналов соединен с входом программного блока и с первым входом блока синхронизации, второй вход которого соединен с вторым выходом блока формирования команд, второй выход формирова- вателя счетных сигналов соединен с третьим входом блока синхронизации, четвертый вход которого соединен с вторым выходом временного блока, а первый и второй выходы блока синхронизации соединены соответственно с пятым и шестым входами блока формирования команд, третий и четвертый выходы которого соединены соответственно с четвертым и пятым входами второго блока контроля, датчики наличия захватов над вагонеткой и над местом съема, датчики верхнего положения захватов и свободной подвески захватов подключены соответственно к шестому, седьмому, восьмому и девятому входам второго блока контроля, выходы которого подключены к соответствующим блокам управления электродвигателей подъема и опускания захватов, передвижения тележки и пресса.
-
#W
53
ФигЛ
-1
4/
43
:45
i
h
Jj
Фиг.З
18
w
56
HBB.
Фиг. 5
гГШ
ПЯЛ
гш @
А/г
Фиг. 6
Редактор М.Бандура
Фиг. 9
Составитель Л.Шарова Техред С.Мигунова Корректор с.Шекмар
Заказ 1490
Тираж 396
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
us
-#-J
34
Подписное
| Мухина Т.Г, Производство силикатного кирпича | |||
| М.: Высшая школа, 1971, с.147-148 | |||
| Устройство автоматического управления автоматом для укладки кирпича | 1983 |
|
SU1206102A1 |
| Видоизменение прибора с двумя приемами для рассматривания проекционные увеличенных и удаленных от зрителя стереограмм | 1919 |
|
SU28A1 |
